BAB I PENDAHULUAN -...
19
1 BAB I PENDAHULUAN I.1. Latar Belakang Tersedianya data spasial, tidak lepas dari keberadaan ilmu Geodesi dan Geomatika. Ilmu Geodesi dan Geomatika memiliki kompetensi dalam penyediaan data spasial dua dimensi maupun tiga dimensi. Data spasial yang mampu disediakan, tidak sebatas data terkait topografi saja. Bidang ilmu Geodesi dan Geomatika mampu menyediakan data spasial nontopografi. Berbagai macam teknologi disediakan bidang ilmu Geodesi dan Geomatika untuk keperluan akuisisi data spasial. Teknologi dalam bidang ilmu Geodesi dan Geomatika yang dapat digunakan untuk melakukan akuisisi data tiga dimensi nontopografi salah satunya adalah fotogrametri jarak dekat. Fotogrametri jarak dekat adalah sebuah teknik akuisisi data spasial di permukaan bumi menggunakan metode fotogrametri dengan jarak kamera ke objek menurut Seker dan Duran (2011) adalah 10 meter sampai dengan 100 meter. Biaya akuisisi data yang murah dan pemrosesan data yang mudah, membuat fotogrametri jarak dekat menjadi alternatif pilihan dalam pekerjaan akuisisi data tiga dimensi suatu objek diatas permukaan bumi. Pada penelitian yang dilakukan oleh Janitra (2014) ditemukan bahwa fotogrametri jarak dekat efektif digunakan untuk melakukan akuisisi data tiga dimensi suatu objek, terlebih untuk objek yang kecil. Keefektifan tersebut dinilai dari terbentuknya model tiga dimensi objek yang teliti dan memiliki dimensi mendekati objek nyata. Namun demikian pada penelitian ini dikatakan bahwa untuk mendapatkan model tiga dimensi objek yang teliti, satu sisi objek harus terekam dalam satu foto. Hasil penelitian Janitra (2014), tentu akan sulit jika diaplikasikan untuk objek dengan ukuran besar, contohnya bangunan besar. Dalam penelitian ini, yang dimaksud dengan bangunan besar adalah bangunan yang memiliki dimensi panjang lebih dari 10 meter dan lebar lebih dari 10 meter. Apabila dipaksakan satu sisi bangunan terekam dalam satu foto, maka foto sisi tersebut harus diambil dari jarak yang cukup jauh. Menurut penelitian yang telah dilakukan oleh Wihasti (2012) ketelitian koordinat yang
-
Upload
vuongkhuong -
Category
Documents
-
view
233 -
download
0
Transcript of BAB I PENDAHULUAN -...
1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Tersedianya data spasial, tidak lepas dari keberadaan ilmu Geodesi dan
Geomatika. Ilmu Geodesi dan Geomatika memiliki kompetensi dalam penyediaan data
spasial dua dimensi maupun tiga dimensi. Data spasial yang mampu disediakan, tidak
sebatas data terkait topografi saja. Bidang ilmu Geodesi dan Geomatika mampu
menyediakan data spasial nontopografi. Berbagai macam teknologi disediakan
bidang ilmu Geodesi dan Geomatika untuk keperluan akuisisi data spasial.
Teknologi dalam bidang ilmu Geodesi dan Geomatika yang dapat digunakan
untuk melakukan akuisisi data tiga dimensi nontopografi salah satunya adalah
fotogrametri jarak dekat. Fotogrametri jarak dekat adalah sebuah teknik akuisisi data
spasial di permukaan bumi menggunakan metode fotogrametri dengan jarak kamera
ke objek menurut Seker dan Duran (2011) adalah 10 meter sampai dengan 100 meter.
Biaya akuisisi data yang murah dan pemrosesan data yang mudah, membuat
fotogrametri jarak dekat menjadi alternatif pilihan dalam pekerjaan akuisisi data tiga
dimensi suatu objek diatas permukaan bumi.
Pada penelitian yang dilakukan oleh Janitra (2014) ditemukan bahwa
fotogrametri jarak dekat efektif digunakan untuk melakukan akuisisi data tiga dimensi
suatu objek, terlebih untuk objek yang kecil. Keefektifan tersebut dinilai dari
terbentuknya model tiga dimensi objek yang teliti dan memiliki dimensi mendekati
objek nyata. Namun demikian pada penelitian ini dikatakan bahwa untuk mendapatkan
model tiga dimensi objek yang teliti, satu sisi objek harus terekam dalam satu foto.
Hasil penelitian Janitra (2014), tentu akan sulit jika diaplikasikan untuk objek
dengan ukuran besar, contohnya bangunan besar. Dalam penelitian ini, yang dimaksud
dengan bangunan besar adalah bangunan yang memiliki dimensi panjang lebih dari 10
meter dan lebar lebih dari 10 meter. Apabila dipaksakan satu sisi bangunan terekam
dalam satu foto, maka foto sisi tersebut harus diambil dari jarak yang cukup jauh.
Menurut penelitian yang telah dilakukan oleh Wihasti (2012) ketelitian koordinat yang
2
dihasilkan oleh model dari foto berbanding terbalik dengan jarak kamera ke objek.
Semakin dekat suatu objek dengan kamera, maka koordinat yang dihasilkan akan
semakin teliti. Sebaliknya, semakin jauh jarak kamera ke objek maka ketelitian
koordinat yang dihasilkan akan menurun. Selain itu, pengambilan foto dari jarak yang
jauh, juga akan menurunkan ketelitian model yang dihasilkan dari segi kelengkapan
model yang ditandai dengan hilangnya detildetil yang terdapat pada bangunan nyata,
seperti lekuk–lekuk pada bagian bangunan.
Apabila bangunan yang besar difoto dari jarak dekat, maka akan dihasilkan
beberapa foto pada setiap sisinya. Oleh karena itu, perlu dilakukan penelitian untuk
meneliti hasil data spasial yang diperoleh melalui model yang dihasilkan. Penelitian
hasil data spasial yang dilakukan meliputi dua aspek, yaitu akurasi ukuran dimensi
model dan kelengkapan model tiga dimensi objek yang dihasilkan. Akurasi ukuran
dimensi model yang diteliti terletak pada beberapa bagian di setiap sisi model. Akurasi
kelengkapan model yang akan diteliti terletak pada seluruh bagian model yang
dihasilkan.
Dalam penelian ini, dilakukan pembuatan model menggunakan dua metode,
yaitu interaktif dan otomatis. Perhitungan ketelitian ukuran dimensi model yang
dihasilkan dari metode interaktif, dilakukan dengan membandingkan hasil ukuran
dimensi yang dihasilkan dengan ukuran hasil pengukuran alat total station
reflectorless. Perhitungan ketelitian ukuran dimensi model yang dihasilkan dari
metode otomatis, dilakukan dengan membandingkan hasil ukuran dimensi model
tersebut dengan ukuran dimensi model hasil metode interaktif. Penelitian kelengkapan
model yang dihasilkan dari metode interaktif maupun otomatis, dilakukan dengan
membandingkan model tiga dimensi objek yang dihasilkan dengan objek yang
sebenarnya.
I.2. Identifikasi Masalah
Penelitian yang dilakukan oleh Janitra (2014) menghasilkan penemuan bahwa
model tiga dimensi objek yang teliti akan didapatkan apabila satu sisi objek terekam
dalam satu foto. Hasil penelitian tersebut mudah diterapkan pada objek yang berukuran
3
kecil, seperti bangunan kecil. Namun demikian hasil penelitian tersebut akan sulit
diterapkan pada objek yang berukuran besar, seperti bangunan besar.
Pada bangunan besar, tentu diperlukan beberapa foto pada setiap sisinya. Hal ini
dilakukan untuk mempertahankan ketelitian model dari segi kelengkapan objek yang
dimiliki, seperti lekuklekuk bangunan. Semakin kecil jarak dari objek ke kamera,
maka angka ground sample distance yang dihasilkan juga makin rapat. Selain itu, jarak
pengambilan foto yang dekat digunakan untuk menghasilkan koordinat model yang
teliti, seperti pada penelitian yang telah dilakukan Wihasti (2012).
Adanya beberapa foto yang diperlukan untuk memodelkan satu sisi objek, perlu
dianalisis bagaimana hasil ketelitiannya. Analisis perlu dilakukan pada ukuran dimensi
model untuk setiap sisinya. Selain itu, analisis juga diperlukan untuk mengamati
kelengkapan model tiga dimensi yang dihasilkan dari foto. Hasil analisis nantinya
digunakan untuk mengetahui kualitas data spasial model tiga dimensi objek yang
dihasilkan.
Kondisi lain yang perlu diteliti adalah hasil pembuatan model menggunakan dua
metode yang berbeda, yaitu interaktif dan otomatis. Selama ini, metode interaktif
diketahui memiliki ketelitian yang bagus, karena memungkinkan operator untuk
melakukan kontrol pekerjaan selama pembuatan model. Namun demikian metode
interaktif memerlukan waktu pemrosesan data yang cukup lama. Metode otomatis
diketahui sebagai metode yang memiliki kelebihan dalam segi waktu. Waktu yang
diperlukan untuk melakukan pemrosesan data cukup singkat. Namun demikian
ketelitian model yang dihasilkan dari metode otomatis ini masih kurang dapat diyakini
kualitasnya, karena operator tidak dapat melakukan kontrol pekerjaan selama
pembuatan model.
I.3. Pertanyaan Penelitian
Berdasarkan rumusan masalah diatas, maka pertanyaan penelitian ini adalah :
1. Bagaimanakah ketelitian ukuran dimensi model yang dihasilkan dari metode
interaktif?
2. Bagaimanakah ketelitian ukuran dimensi model yang dihasilkan dari metode
otomatis?
4
3. Apakah model tiga dimensi yang dihasilkan dari metode interaktif memiliki
kelengkapan detil seperti objek asli di lapangan?
4. Apakah model tiga dimensi yang dihasilkan dari metode otomatis memiliki
kelengkapan detil seperti objek asli di lapangan?
I.4. Cakupan Penelitian
Penelitian ini dilakukan untuk menerapkan metode fotogrametri jarak dekat
untuk akuisisi data tiga dimensi suatu objek. Objek yang digunakan merupakan objek
besar yang dalam hal ini adalah bangunan besar. Bangunan besar yang digunakan
sebagai objek penelitian adalah gedung Grha Sabha Pramana (GSP) Universitas
Gadjah Mada. Objek penelitian dibatasi hanya bagian timur dan utara dari bangunan
saja.
Penelitian dilakukan pada tahun 2015. Data utama penelitian berupa foto objek
yang didapat dari pemotretan pada objek. Hasil pemotretan pada objek digunakan
sebagai bahan pembuatan model tiga dimensi objek yang dapat dimanfaatkan untuk
akuisisi data tiga dimensi. Batasanbatasan yang didefinisikan pada penelitian yaitu :
1. pemotretan dilakukan menggunakan kamera small format, yaitu kamera
digital single lens reflex,
2. digunakan panjang fokus yang sama pada setiap pemotretan,
3. jarak antar stasiun pemotretan (base) tidak ditentukan berdasarkan
perbandingan dengan height/distance, base ditentukan berdasarkan kondisi
sekitar objek pemotretan, dengan kondisi base tersebut, maka jarak antar
stasiun pemotretan tidak sama,
4. data ukuran objek di lapangan diambil menggunakan alat total station
reflectorless, dengan koordinat yang dihasilkan adalah koordinat lokal,
5. tidak dilakukan pengukuran posisi kamera saat pemotretan, sehingga
koordinat yang dihasilkan oleh model adalah koordinat lokal model,
6. nilai parameter kalibrasi kamera yang digunakan pada setiap foto untuk
pembuatan model secara interaktif maupun otomatis diasumsikan sama,
yaitu diwakili oleh nilai parameter kalibrasi kamera yang diperoleh dari
PhotoModeler Scanner,
5
7. kedua perangkat lunak yang digunakan untuk membuat model, dianggap
memiliki bundle adjustment yang sama,
8. kelengkapan detil yang dimaksud dalam penelitian ini adalah dinding,
jendela, lekuk−lekuk di dinding, tangga dan ornamen−ornamen yang
dimiliki oleh gedung GSP,
9. bagian yang diukur ketelitian dimensinya adalah panjang dan lebar jendela
secara mendatar yang tampak di permukaan (parameter x dan y), bukan
bagian jendela yang menjorok ke dalam (parameter z).
Sebelum digunakan untuk melakukan pemotretan, kamera dikalibrasi. Pencarian
parameter kalibrasi dilakukan dengan pengolahan foto hasil pemotretan target
kalibrasi dari cetakan calibration grid pada perangkat lunak PhotoModeler Scanner.
Pemrosesan foto menjadi model tiga dimensi secara interaktif dilakukan dengan
perangkat lunak PhotoModeler Scanner versi 2013.0.0.911, untuk perangkat 64 bit.
Pemrosesan foto menjadi model tiga dimensi secara otomatis dilakukan dengan
menggunakan perangkat lunak AgiSoft Photoscan Professional versi 1.1.4 build
2021, untuk perangkat 64 bit. Model yang dihasilkan dari metode interaktif,
dibandingkan ukuran dimensi dan kelengkapan detilnya dengan kondisi sebenarnya di
lapangan. Model yang dihasilkan dari metode otomatis, dibandingkan ukuran
dimensinya dengan ukuran dimensi model hasil metode interaktif, sedangkan
kelengkapan detilnya dibandingkan dengan kondisi sebenarnya di lapangan. Hasil
analisis digunakan untuk mengetahui kualitas data spasial model tiga dimensi objek
yang dihasilkan.
I.5. Tujuan Penelitian
Berdasarkan pertanyaan penelitian yang diajukan dan dengan memperhatikan
cakupan penelitian, maka tujuan dari penelitian ini adalah :
1. membuat model tiga dimensi gedung GSP dengan fotogrametri jarak dekat,
menggunakan metode pemrosesan interaktif dan otomatis,
2. menghitung ketelitian ukuran dimensi dan mengetahui kelengkapan model
tiga dimensi gedung GSP hasil metode interaktif,
6
3. menghitung ketelitian ukuran dimensi dan mengetahui kelengkapan model
tiga dimensi gedung GSP hasil metode otomatis,
4. melakukan evaluasi kualitas data spasial model tiga dimensi gedung GSP
yang dihasilkan dari metode pemrosesan interaktif dan otomatis.
I.6. Manfaat Penelitian
Penerapan fotogrametri jarak dekat untuk memodelkan bangunan yang besar
diharapkan dapat memberikan kontribusi dalam ilmu fotogrametri jarak dekat. Selain
itu, hasil analisis ketelitian model yang dibentuk dari metode pemrosesan interaktif
maupun otomatis, diharapkan dapat memberikan manfaat berupa pertimbangan
kepada instansi maupun individu yang ingin menggunakan metode pemrosesan
tersebut.
I.7. Tinjauan Pustaka
Penelitian ini menerapkan metode fotogrametri jarak dekat pada objek yang
besar, yaitu gedung GSP. Beberapa penelitian yang pernah ada sebelumnya, meneliti
penerapan fotogrametri jarak dekat untuk berbagai macam objek. Penelitian terkait
faktorfaktor yang mempengaruhi ketelitian fotogrametri jarak dekat dan kombinasi
fotogrametri jarak dekat dengan metode lain juga pernah dilakukan.
Alsadik (2014) melakukan penelitian terkait fotogrametri jarak dekat untuk
pembuatan model tiga dimensi situs cagar budaya. Hasil penelitian ini adalah beberapa
macam konfigurasi kamera untuk pembuatan model tiga dimensi suatu bangunan cagar
budaya. Konfigurasi kamera tersebut disesuaikan dengan ketelitian yang diharapkan,
bentuk bangunan yang akan dimodelkan, dan metode pemrosesan yang akan
digunakan.
Aristia (2014) melakukan penelitian tentang pemodelan tiga dimensi kawasan
cagar budaya menggunakan fotogrametri jarak dekat kombinasi data foto terestris dan
foto udara kawasan Candi Sambisari. Hasil penelitian ini adalah data foto terestris dan
foto udara dapat digabungkan menjadi satu kesatuan model tiga dimensi Candi
Sambisari. Namun demikian pada tahap pemrosesan data menggunakan metode
7
otomatis, beberapa point cloud tidak berhasil dibuat akibat kurang baiknya orientasi
kamera, gangguan eksternal dan perubahan cuaca saat pengambilan data.
Janitra (2014) melakukan penelitian tentang fotogrametri jarak dekat untuk
pembuatan model tiga dimensi Candi Gebang. Hasil penelitian ini adalah fotogrametri
jarak dekat efektif untuk melakukan akuisisi data tiga dimensi suatu objek kecil,
karena dimensi model mendekati dimensi objek nyata. Untuk mendapatkan model tiga
dimensi objek yang teliti, satu sisi objek harus terekam dalam satu foto.
Barnes (2012) melakukan penelitian fotogrametri jarak dekat yang
dikombinasikan dengan laser scanning untuk pembuatan dense point cloud Candi
Cangkuang. Hasil penelitian ini adalah baik dalam metode fotogrametri jarak dekat
maupun laser scanning sebaiknya memperhatikan agar semua bagian objek tercakup
seluruhnya dalam satu kali pengambilan data.
Wihasti (2013) melakukan penelitian pengaruh jarak pemotretan terhadap
ketelitian koordinat titik cek pada teknik fotogrametri jarak dekat. Hasil dari penelitian
ini adalah tingkat ketelitian koordinat titik yang dihasilkan berbanding terbalik dengan
besarnya jarak pemotretan. Semakin dekat jarak pemotretan, maka koordinat yang
dihasilkan semakin teliti.
Murtiyoso (2011) melakukan penelitian fotogrametri jarak dekat untuk
membantu rekonstruksi objek arkeologi Candi Perwara. Hasil dari penelitian ini adalah
tingkat akurasi model yang dihasilkan mencapai level milimeter dan memiliki
kedetailan yang tinggi, yang ditandai dengan kenampakan relief yang rumit.
Penggunaan kamera nonmetrik pada pemotretan tetap mampu menghasilkan
ketelitian dimensi model yang tinggi asalkan kamera tersebut dikalibrasi.
Wahab (2009) melakukan penelitian analisis geometri data objek tiga dimensi
menggunakan fotogrametri jarak dekat, terrestrial laser scanner dan electronic total
station. Hasil dari penelitian ini adalah akurasi fotogrametri jarak dekat dipengaruhi
oleh kalibrasi kamera. Hasil fotogrametri jarak dekat akan lebih baik apabila dilakukan
kalibrasi menggunakan metode field calibration karena kondisi kamera nonmetrik
yang tidak stabil.
Widianto (1987) melakukan penelitian fotogrametri jarak dekat untuk
penggambaran kembali bentuk geometri permukaan badan pesawat terbang. Hasil dari
8
penelitian ini adalah Fotogrametri jarak dekat mampu menghasilkan informasi detil
teknik berupa gambar profil permukaan badan pesawat terbang dan gambar garisgaris
isometrisnya.
I.8. Landasan Teori
I.8.1. Fotogrametri Jarak Dekat
Fotogrametri dapat diartikan sebagai seni, ilmu, dan teknologi untuk
memperoleh informasi yang dapat dipercaya tentang suatu objek fisik dan keadaan di
sekitarnya melalui proses perekaman, pengukuran, dan interpretasi citra fotografis atau
rekaman pola radiasi elektromagnetik (Wolf dan Dewitt 2000). Fotogrametri jarak
dekat adalah fotogrametri yang diterapkan pada objek di permukaan bumi, dengan
jarak objek tersebut ke kamera kurang dari 300 meter (Mathew 2008).
Pada prinsipnya metode fotogrametri dilakukan dengan melakukan
pengambilan gambar di sekitar/sekeliling objek yang akan dipotret dengan posisi
kamera yang konvergen (Atkinson 1996). Faktorfaktor yang mempengaruhi
ketelitian fotogrametri jarak dekat menurut Harintaka (2012) adalah :
a. B/H ratio,
b. besar area overlap yang dihasilkan oleh foto,
c. jumlah titik kontrol
d. jumlah titik yang diukur di foto
e. GSD piksel
f. internal orientation parameter dan exterior orientation parameter.
Pembuatan model tiga dimensi menggunakan data fotogrametri jarak dekat,
terbagi dalam tiga tahap, yaitu orientasi dalam, orientasi relatif dan orientasi absolut.
Menurut Mathew (2008) orientasi dalam merupakan suatu proses yang memerlukan
nilai kalibrasi kamera, karena dalam proses ini akan terjadi koreksi pada kesalahan
akibat distorsi kamera dan kesalahan lain pada kamera. Orientasi relatif adalah suatu
proses menentukan elemen orientasi luar pada kamera. Dalam orientasi relatif, suatu
foto akan dihubungkan dengan foto lain, sehingga akan tersusun posisi foto yang
kondisinya sama seperti saat pemotretan. Setelah foto memiliki kondisi yang sama
9
seperti saat pemotretan, maka foto yang saling bertampalan dapat dibuat model tiga
dimensinya. Orientasi absolut adalah suatu proses untuk mengubah koordinat model
tiga dimensi yang dihasilkan yang semula masih dalam koordinat relatif menjadi
koordinat tanah. Mathew (2008) mengatakan bahwa akan terdapat transformasi
konform tiga dimensi saat melakukan pengubahan koordinat dalam proses ini.
I.8.2. Kamera Digital
Penggunaan kamera digital erat kaitannya dalam perkembangan era digital dan
keekonomisannya untuk aplikasi fotogrametri jarak dekat. Kamera digital memiliki
komponen utama yang terdiri atas lensa, sensor, dan media penyimpanan. Kamera
ini memiliki karakteristik desain yang berbeda dengan kamera analog. Perbedaan
utamanya ialah pada media film seluloid yang diganti oleh sensor optik elektrik
seperti Charge–Couple Device (CCD) atau Complementary Metal Oxide
Semiconductor (CMOS). CCD dan CMOS berfungsi mengubah photon yang jatuh
mengenai permukaan sensor menjadi elektron yang selanjutnya elektron ini
diakumulasikan ke dalam kapasitor dan diubah menjadi bentuk sinyal elektronik. Pada
awalnya, CCD memiliki keunggulan dibandingkan dengan CMOS. Saat itu, CCD
memiliki sensor yang lebih peka terhadap cahaya sehingga pada kondisi redup tanpa
bantuan flash masih bisa menangkap objek dengan baik. Namun demikian, kini
kamera digital yang dijual di pasaran lebih banyak menggunakan sensor CMOS.
CMOS telah memiliki banyak perkembangan. CMOS menurut Axis (2010) adalah
sensor yang menggunakan teknologi khusus dengan kualitas dan kepekaan cahaya
yang lebih tinggi dibandingkan dengan sensor CCD. Bentuk CCD dan CMOS dapat
dilihat pada Gambar I.1.
Gambar I.1. Bentuk CCD (kiri) dan CMOS (kanan) (Sumber : Axis, 2010).
10
Kamera digital juga dilengkapi dengan Liquid Crystal Display (LCD), yaitu
layar monitor mini yang digunakan untuk melihat secara langsung hasil pemotretan
yang dilakukan. Adanya LCD ini dapat membantu pengguna untuk memilih dan
mengatur menu secara interaktif, serta apabila hasil pemotretan kualitasnya kurang
baik, maka dapat langsung dihapus, kemudian dilakukan pemotretan ulang. Terdapat
sebuah istilah yang dikenal dengan nama ppi (pixel per inch) pada kamera digital. Ppi
menunjukkan jumlah piksel per inci linear dalam sebuah foto. Resolusi foto tidak dapat
dipisahkan dengan ppi. Semakin besar ppi maka jumlah piksel per satuan incinya
semakin banyak, sehingga objek pada foto akan semakin jelas atau resolusi fotonya
baik (Ikawati 2012).
I.8.3. Geometri Foto
Geometri foto erat kaitannya dengan sistem proyeksi pada foto. ASPRS (1989)
menjelaskan bahwa proyeksi sentral pada foto berbeda dengan proyeksi ortografi.
Proyeksi ortografi menunjukkan skala yang konstan di sepanjang garis proyeksinya,
sedangkan proyeksi sentral menunjukkan skala yang berbeda pada setiap titik yang
diproyeksikan. Skala suatu titik yang mendekati pusat proyeksi pada proyeksi sentral
akan lebih besar daripada skala suatu titik yang jauh dari pusat proyeksi. Variasi skala
pada foto menyebabkan kurang telitinya pengukuran pada satu foto. Semakin besar
variasi jarak objek ke lensa kamera, semakin besar pula variasi skala yang disajikan.
Hal tersebut menyebabkan kemungkinan terjadinya relief displacement atau
pergeseran relief. Besarnya pergeseran relief bergantung pada jarak titik pada foto ke
pusat proyeksi. Semakin jauh dari pusat proyeksi, semakain besar kemungkinan
terjadinya pergeseran relief (Wihasti 2012).
I.8.4. Geometri Kamera
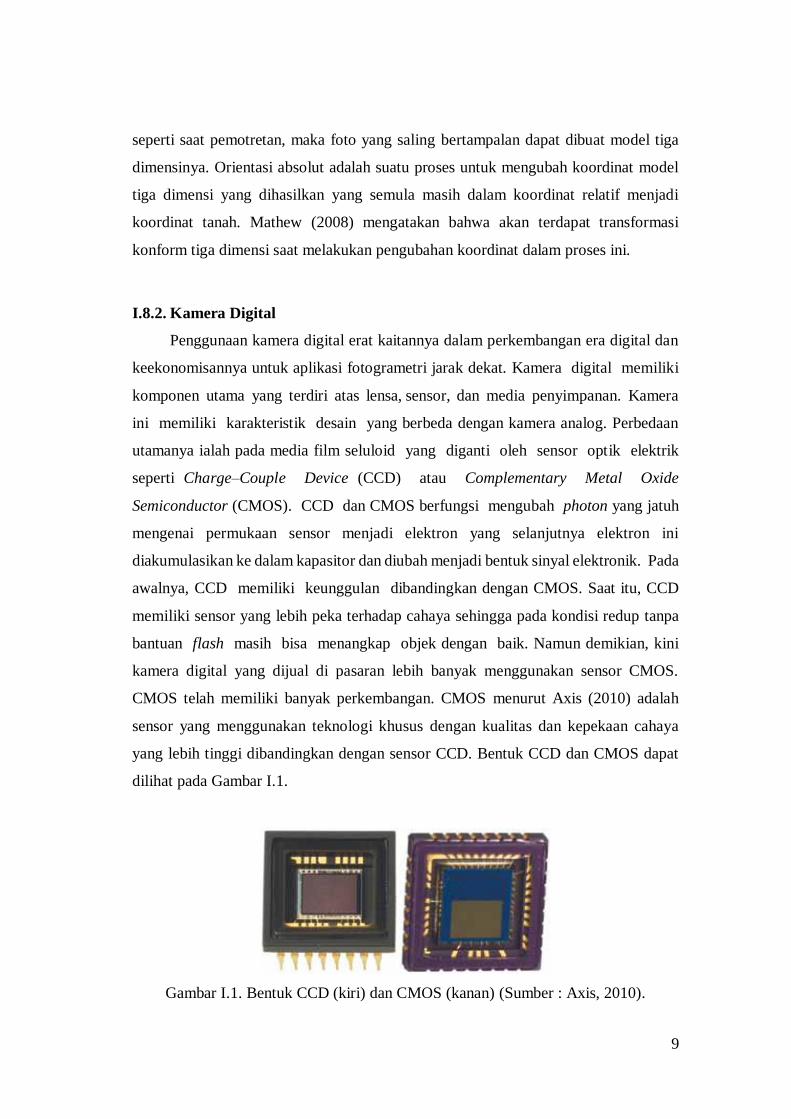
Setiap kamera memiliki model geometri proyeksi. Menurut Axis (2010), model
geometri proyeksi kamera dapat diperlihatkan menggunakan hubungan antara bidang
gambar, pusat kamera dan panjang fokus kamera. Gambar model geometri proyeksi
kamera, dapat dilihat pada Gambar I.2.
11
Gambar I.2. Geometri proyeksi kamera tiga dimensi (kiri) dan dua dimensi (kanan)
(Sumber : Axis, 2010).
Gambar I.2 kiri menunjukkan geometri proyeksi kamera dalam tiga dimensi,
sedangkan Gambar I.2 kanan menunjukkan geometri proyeksi kamera dalam dua
dimensi. Gambar I.2 kiri, menunjukkan lokasi suatu titik X yang ada pada ruang tiga
dimensi (X,Y,Z) dan lokasi titik tersebut pada bidang gambar. Pada Gambar I.2 kanan,
dapat diamati bahwa panjang fokus kamera (f) merupakan jarak antara pusat kamera
(C) dengan bidang gambar (P).
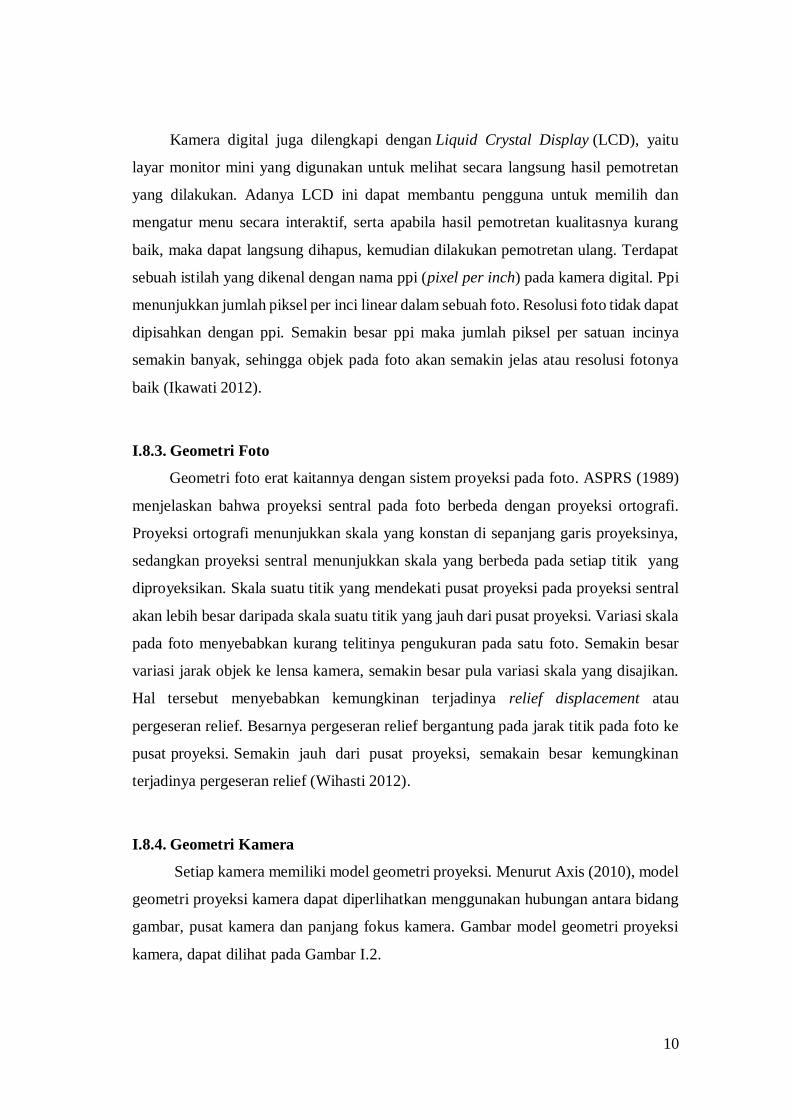
Untuk membentuk foto yang memiliki tampalan, maka diperlukan suatu
geometri kamera yang epipolar. Geometri epipolar menurut Axis (2010) adalah suatu
kondisi dimana dua sistem kamera, didefinisikan terletak pada suatu baseline yang
sama. Kondisi geometri epipolar dapat dilihat pada Gambar I.3.
Gambar I.3. Geometri epipolar dua buah kamera (Sumber : Axis, 2010)
Melalui Gambar I.3, maka dapat didefinisikan bahwa pada geometri epipolar,
foto yang dihasilkan dari kedua posisi kamera harus memiliki korespondensi. Selain
itu, setiap bidang gambar harus dapat mendefinisikan garis epipolar yang
menghubungkan kedua bidang gambar tersebut. Pada Gambar I.3, garis epipolar yang
dibentuk dari kedua bidang gambar adalah baseline CC’.
12
I.8.5. Kalibrasi Kamera
Meskipun telah didesain dengan sangat cermat, komponen kamera tidak dapat
dibuat secara sempurna. Salah satu kondisi yang membuat kamera tidak sempurna
adalah lensa yang digunakan pada kamera tersebut. Tidak sempurnanya lensa,
membuat foto yang nantinya dihasilkan memiliki distorsi. Adanya distorsi pada foto,
tidak akan mempengaruhi kualitas ketajaman citra yang dihasilkan (Hanifa 2007).
Namun demikian distorsi foto akan menimbulkan kesalahan informasi akibat
pergeseran lokasi titik yang ada pada foto dari kondisi sebenarnya di lapangan. Dengan
adanya kondisi tersebut, maka perlu dilakukan pengkalibrasian kamera untuk dapat
menentukan besarnya penyimpangan yang terjadi. Parameter yang dicari dalam proses
kalibrasi kamera adalah panjang fokus, principal point (x , y), dan distorsi lensa.
Distorsi lensa dibagi menjadi dua yaitu distorsi parsial dan distorsi tangensial. Distorsi
parsial yaitu distorsi kearah vertikal dan horizontal, yang diistilahkan dengan K1, K2
dan K3, sedangkan distorsi tangensial adalah distorsi kearah diagonal, yang
diistilahkan sebagai P1 dan P2.
Salah satu metode kalibrasi kamera adalah field calibration. Menurut Clarke dan
Fryer (1998) field calibration adalah suatu metode kalibrasi kamera yang dilakukan
dengan menggunakan objek yang telah disurvei dan diyakini mampu menghasilkan
nilai kalibrasi kamera yang teliti. Salah satu objek yang dapat digunakan untuk
melakukan field calibration adalah pola yang terdapat pada bidang planar dua dimensi.
Penerapan teknik kalibrasi menggunakan pola yang terdapat pada bidang planar
dilakukan dengan melakukan pemotretan pola tersebut dari berbagai posisi (Elgamal,
2012).
I.8.6. Konfigurasi Kamera
Terdapat dua buah konfigurasi kamera yang cukup dikenal dalam fotogrametri
jarak dekat. Konfigurasi kamera tersebut adalah konvergen dan planar. Didapatkan
sebuah penemuan bahwa konfigurasi kamera secara konvergen bagus bila diterapkan
pada pembuatan model dari foto secara interaktif. Kondisi ini disebabkan oleh karena
konfigurasi kamera konvergen mampu menghasilkan konfigurasi perbandingan base
13
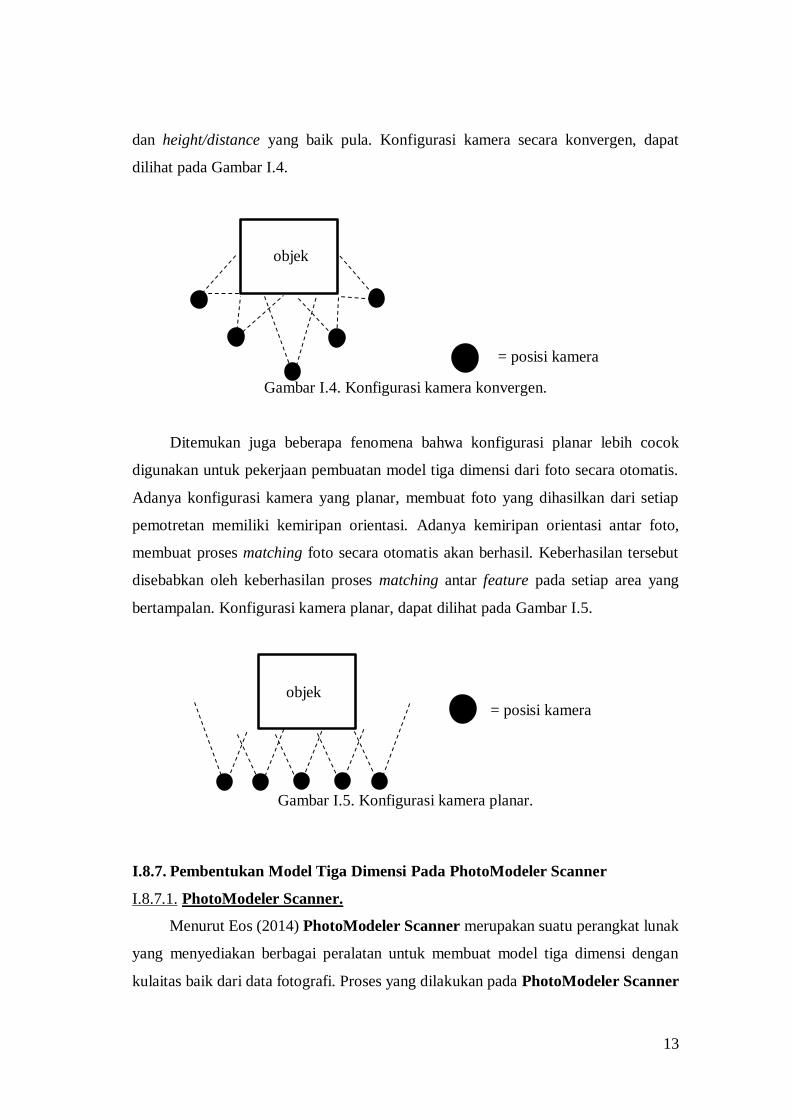
dan height/distance yang baik pula. Konfigurasi kamera secara konvergen, dapat
dilihat pada Gambar I.4.
Gambar I.4. Konfigurasi kamera konvergen.
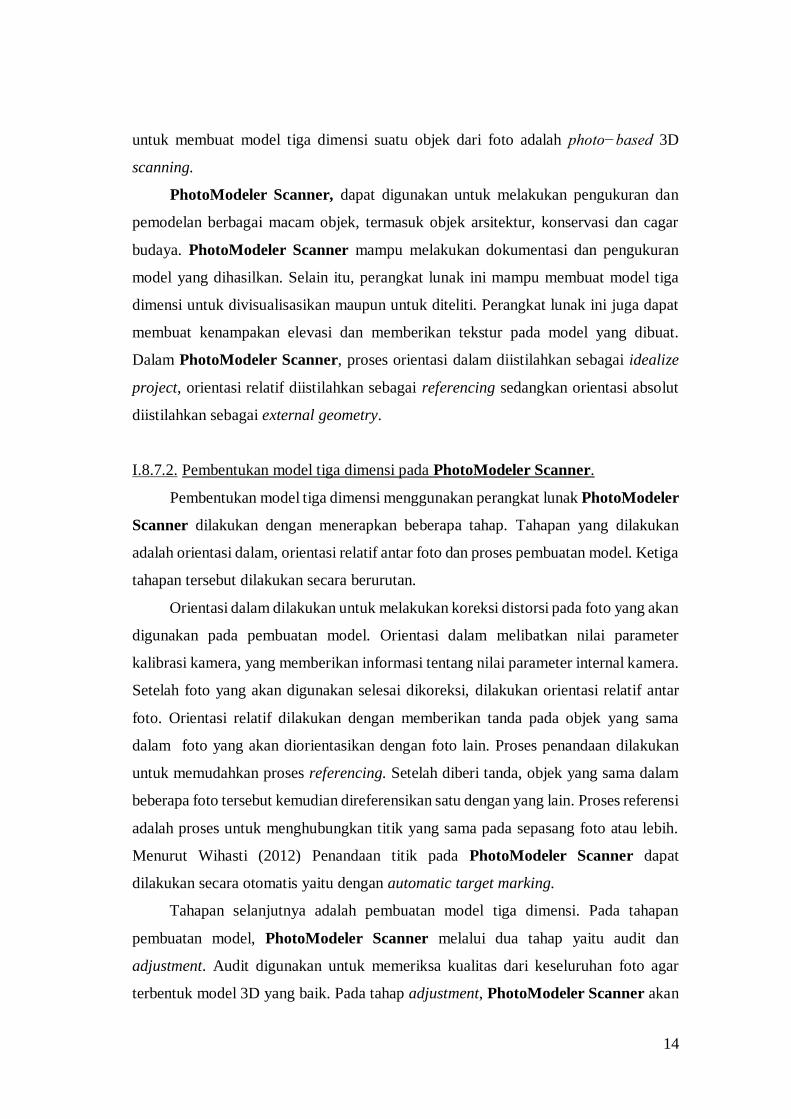
Ditemukan juga beberapa fenomena bahwa konfigurasi planar lebih cocok
digunakan untuk pekerjaan pembuatan model tiga dimensi dari foto secara otomatis.
Adanya konfigurasi kamera yang planar, membuat foto yang dihasilkan dari setiap
pemotretan memiliki kemiripan orientasi. Adanya kemiripan orientasi antar foto,
membuat proses matching foto secara otomatis akan berhasil. Keberhasilan tersebut
disebabkan oleh keberhasilan proses matching antar feature pada setiap area yang
bertampalan. Konfigurasi kamera planar, dapat dilihat pada Gambar I.5.
Gambar I.5. Konfigurasi kamera planar.
I.8.7. Pembentukan Model Tiga Dimensi Pada PhotoModeler Scanner
I.8.7.1. PhotoModeler Scanner.
Menurut Eos (2014) PhotoModeler Scanner merupakan suatu perangkat lunak
yang menyediakan berbagai peralatan untuk membuat model tiga dimensi dengan
kulaitas baik dari data fotografi. Proses yang dilakukan pada PhotoModeler Scanner
objek = posisi kamera
objek
= posisi kamera
14
untuk membuat model tiga dimensi suatu objek dari foto adalah photo−based 3D
scanning.
PhotoModeler Scanner, dapat digunakan untuk melakukan pengukuran dan
pemodelan berbagai macam objek, termasuk objek arsitektur, konservasi dan cagar
budaya. PhotoModeler Scanner mampu melakukan dokumentasi dan pengukuran
model yang dihasilkan. Selain itu, perangkat lunak ini mampu membuat model tiga
dimensi untuk divisualisasikan maupun untuk diteliti. Perangkat lunak ini juga dapat
membuat kenampakan elevasi dan memberikan tekstur pada model yang dibuat.
Dalam PhotoModeler Scanner, proses orientasi dalam diistilahkan sebagai idealize
project, orientasi relatif diistilahkan sebagai referencing sedangkan orientasi absolut
diistilahkan sebagai external geometry.
I.8.7.2. Pembentukan model tiga dimensi pada PhotoModeler Scanner.
Pembentukan model tiga dimensi menggunakan perangkat lunak PhotoModeler
Scanner dilakukan dengan menerapkan beberapa tahap. Tahapan yang dilakukan
adalah orientasi dalam, orientasi relatif antar foto dan proses pembuatan model. Ketiga
tahapan tersebut dilakukan secara berurutan.
Orientasi dalam dilakukan untuk melakukan koreksi distorsi pada foto yang akan
digunakan pada pembuatan model. Orientasi dalam melibatkan nilai parameter
kalibrasi kamera, yang memberikan informasi tentang nilai parameter internal kamera.
Setelah foto yang akan digunakan selesai dikoreksi, dilakukan orientasi relatif antar
foto. Orientasi relatif dilakukan dengan memberikan tanda pada objek yang sama
dalam foto yang akan diorientasikan dengan foto lain. Proses penandaan dilakukan
untuk memudahkan proses referencing. Setelah diberi tanda, objek yang sama dalam
beberapa foto tersebut kemudian direferensikan satu dengan yang lain. Proses referensi
adalah proses untuk menghubungkan titik yang sama pada sepasang foto atau lebih.
Menurut Wihasti (2012) Penandaan titik pada PhotoModeler Scanner dapat
dilakukan secara otomatis yaitu dengan automatic target marking.
Tahapan selanjutnya adalah pembuatan model tiga dimensi. Pada tahapan
pembuatan model, PhotoModeler Scanner melalui dua tahap yaitu audit dan
adjustment. Audit digunakan untuk memeriksa kualitas dari keseluruhan foto agar
terbentuk model 3D yang baik. Pada tahap adjustment, PhotoModeler Scanner akan
15
menjalankan sejumlah algoritma untuk menghasilkan model 3D dan meminimalisasi
kesalahan agar terbentuk model 3D yang teliti.
I.8.8. Pembentukan Model Tiga Dimensi Pada Agisoft PhotoScan Professional
I.8.8.1. Agisoft PhotoScan Professional.
Menurut Agisoft (2014), Agisoft PhotoScan Professional adalah suatu
perangkat lunak yang menggunakan metode pemrosesan fotogrametri secara otomatis.
Agisoft PhotoScan Professional mampu menghasilkan tekstur poligonal model
secara otomatis dengan hanya menggunakan data foto. Agisoft PhotoScan
Professional mampu melakukan pemrosesan dengan data yang jumlahnya sangat
banyak tanpa memerlukan bantuan perangkat transmisi lain. Perangkat lunak ini
mudah dioperasikan oleh berbagai macam kalangan operator. Perangkat ini didesain
menggunakan linear project−based workflow. Sayangnya, kontrol pekerjaan hanya
dapat dilihat setelah pemrosesan selesai dilakukan, dalam bentuk report. Dalam
Agisoft PhotoScan Professional, proses orientasi dalam diistilahkan sebagai optimize
camera, orientasi relatif diistilahkan sebagai align photos, sedangkan orientasi absolut
diistilahkan sebagai setting coordinate system.
I.8.8.2. Pembentukan model tiga dimensi pada Agisoft PhotoScan Professional.
Pembentukan model tiga dimensi menggunakan perangkat lunak Agisoft
PhotoScan Professional dilakukan dengan menerapkan beberapa tahap. Tahapan
yang dilakukan adalah orientasi relatif antar foto dan proses pembuatan model. Kedua
tahapan tersebut dilakukan secara berurutan.
Orientasi relatif dilakukan dengan melakukan align untuk setiap foto yang
digunakan dalam pemrosesan. Proses tersebut dilakukan secara otomatis. Apabila foto
yang akan digunakan berhasilkan di−align satu dengaan yang lainnya, maka foto
tersebut dapat dikatakan telah tereferensi satu dengan yang lain. Proses selanjutnya
adalah pembuatan dense point cloud. Proses ini juga dilakukan secara otomatis oleh
perangkat lunak. Proses ini akan menghasilkan tampilan model sementara yang
berhasil dibentuk. Selanjutnya, untuk menyempurnakan model dilakukan editing pada
dense point cloud bila perlu, kemudian dilanjutkan dengan pembuatan mesh. Mesh
16
menurut Agisoft (2013) adalah model tiga dimensi poligonal. Setelah proses ini
selesai, dapat dilakukan editing pada mesh yang dihasilkan. Apabila perlu, dapat
dilanjutkan dengan pembuatan kenampakan tekstur pada model. Setelah seluruh
tahapan selesai dilaksanakan, maka report pekerjaan dapat dimunculkan.
I.8.9. Root Mean Square Error (RMSE)
RMSE atau yang dikenal dengan RMS residual menurut ESRI (2006) adalah
nilai perbedaan antara nilai sesungguhnya dengan nilai hasil ukuran. RMS residual
didapatkan dari proses pembagian antara nilai akar kuadrat total selisih ukuran kuadrat
dengan jumlah ukuran yang digunakan. Rumus menghitung RMS residual disajikan
pada rumus I.1.
𝑅𝑀𝑆𝐸 = √∑(𝑋1−𝑋)2
𝑛 ………………………………………………………………I.1
Keterangan :
RMSE = Root Mean Square Error
X = nilai sebenarnya
X1 = nilai hasil ukuran
n = banyak ukuran yang digunakan
I.8.10. Ketelitian Ukuran Dimensi Model Hasil Metode Interaktif
Ukuran dimensi hasil pengukuran total station reflectorless merupakan ukuran
yang diasumsikan sebagai ukuran dimensi objek asli di lapangan. Pada tahapan
akuisisi data, total station reflectorless hanya menghasilkan data koordinat tiga
dimensi setiap titik yang diukur saja. Ukuran dimensi hasil pengukuran harus dihitung
menggunakan konsep pembentukan garis oleh dua buah titik dalam ruang tiga dimensi.
Konsep tersebut disajikan pada rumus I.2.
𝑙 = √(𝑋2 − 𝑋1)2 + (𝑌2 − 𝑌1)2 + (𝑍2 − 𝑍1)2 ……………………………………I.2
Keterangan :
l = panjang garis yang dibentuk oleh titik 1 dan 2
17
X1, Y1, Z1 = koordinat tiga dimensi titik 1
X2, Y2, Z2 = koordinat tiga dimensi titik 2
Selisih ukuran dimensi hasil pengukuran total station reflectorless yang
diasumsikan sebagai ukuran dimensi objek sebenarnya dengan ukuran dimensi model
hasil pemrosesan dengan metode interaktif, dapat dihitung menggunakan rumus I.3
dan I.4.
∆𝑝= 𝑃𝑠 − 𝑃𝑚 ………………………………………………………………………I.3
∆𝑙= 𝐿𝑠 − 𝐿𝑚 ………………………………………………………………………I.4
Keterangan :
∆p = selisih ukuran panjang objek sebenarnya dengan panjang model
Ps = panjang detil pada objek sebenarnya
Pm = panjang detil pada model
∆l = selisih ukuran lebar objek sebenarnya dengan panjang model
Ls = lebar detil pada objek sebenarnya
Lm = lebar detil pada model
Nilai RMSE dapat diperoleh dari proses pembagian antara nilai akar kuadrat
total selisih ukuran kuadrat dengan jumlah ukuran yang digunakan, seperti pada rumus
I.5.
𝑅𝑀𝑆𝐸 = √∑(∆𝑝 𝑑𝑎𝑛∆𝑙)2
𝑛……………………………………………………………...I.5
Keterangan :
RMSE = Root Mean Square Error
∆p = selisih ukuran panjang objek sebenarnya dengan panjang model
∆l = selisih ukuran lebar objek sebenarnya dengan panjang model
n = banyak ukuran yang digunakan
18
I.8.11. Ketelitian Ukuran Dimensi Model Hasil Metode Otomatis
Ukuran dimensi hasil pemodelan menggunakan metode interaktif merupakan
ukuran yang diasumsikan sebagai ukuran dimensi objek asli di lapangan. Selisih
ukuran dimensi model hasil pemrosesan interaktif yang diasumsikan sebagai ukuran
dimensi objek sebenarnya dengan ukuran dimensi model hasil pemrosesan dengan
metode otomatis dapat dihitung dengan menggunakan rumus I.6 dan I.7.
∆𝑝= 𝑃𝑚𝑖 − 𝑃𝑚𝑜 ……………………………………………………………………I.6
∆𝑙= 𝐿𝑚𝑖 − 𝐿𝑚𝑜 ..……………………………………..……………………………I.7
Keterangan :
∆p = selisih ukuran model hasil proses interaktif dengan panjang model hasil
proses otomatis
Pmi = panjang detil pada model hasil proses interaktif
Pmo = panjang detil pada model hasil proses otomatis
∆l = selisih ukuran lebar objek sebenarnya dengan panjang model
Lmi = lebar detil pada model hasil proses interaktif
Lmo = lebar detil pada model hasil proses otomatis
Nilai RMSE dapat diperoleh dari proses pembagian antara nilai akar kuadrat
total selisih ukuran kuadrat dengan jumlah ukuran yang digunakan, seperti pada rumus
I.5.
I.8.12. Ground Sample Distance (GSD)
GSD adalah nilai ukuran terkecil yang mampu terekam dalam satu piksel
(Harintaka 2012). Hitungan untuk memperoleh nilai GSD, dapat dilihat dari rumus I.8.
𝐺𝑆𝐷 = 𝑆𝑃𝑆 × 𝐷
𝑓 ..……………………………………..……………………………………I.8
Keterangan :
SPS = sensor pixel size
D = jarak objek ke kamera
19
f = panjang fokus yang digunakan saat pemotretan
Foto yang dihasilkan dari pemotretan memiliki ukuran medium yang memiliki dimensi
kolom × baris adalah 3456 × 2304 pixel. Kamera yang digunakan untuk pemotretan
adalah kamera DSLR Nikon D3100, yang memiliki sensor gambar CMOS dengan
ukuran panjang × lebar adalah 23.1 × 15.4 milimeter, menurut Nikon (2010). Adanya
ukuran dimensi foto dan ukuran sensor, maka nilai SPS dari foto dapat ditentukan
dengan rumus I.9.
𝑆𝑃𝑆 =𝑃𝐶𝑀𝑂𝑆
𝐾 ……………........……………………………………..……………………I.9
Berdasarkan rumus I.9, maka diperoleh nilai SPS kamera NIKON D3100 yang
digunakan adalah 0.0067 milimeter.
I.9. Hipotesis
Secara keseluruhan, model tiga dimensi hasil penerapan fotogrametri jarak dekat
dengan pemrosesan metode interaktif memiliki kualitas data spasial yang lebih baik
dibandingkan dengan pemrosesan metode otomatis.