BAB II TINJAUAN PUSTAKA 2.1 Anatomi dan Neurofisiologi Otak II.pdf · area premotorik, area motorik...
44
8 BAB II TINJAUAN PUSTAKA 2.1 Anatomi dan Neurofisiologi Otak Otak adalah organ vital yang terdiri dari 100-200 milyar sel aktif yang saling berhubungan dan bertanggung jawab atas fungsi mental dan intelektual kita. Otak terdiri dari sel-sel otak yang disebut neuron (Leonard, 2008). Otak merupakan organ yang sangat mudah beradaptasi meskipun neuron- neuron di otak mati tidak mengalami regenerasi, kemampuan adaptif atau plastisitas pada otak dalam situasi tertentu bagian-bagian otak dapat mengambil alih fungsi dari bagian-bagian yang rusak. Otak sepertinya belajar kemampuan baru. Ini merupakan mekanisme paling penting yang berperan dalam pemulihan stroke (Feigin, 2006). Secara garis besar, sistem saraf dibagi menjadi 2, yaitu sistem saraf pusat dan sistem saraf tepi. Sistem saraf pusat (SSP) terbentuk oleh otak dan medulla spinalis. Sistem saraf disisi luar SSP disebut sistem saraf tepi (SST). Fungsi dari SST adalah menghantarkan informasi bolak balik antara SSP dengan bagian tubuh lainnya (Noback dkk, 2005). Otak merupakan bagian utama dari sistem saraf, dengan komponen bagiannya adalah: 2.1.1 Humunkulus Sistem motorik dan sensorik diatur oleh area otak tertentu. Pemetaannya disesuaikan dengan anggota gerak yang diinervasi. Pada anggota gerak yang
Transcript of BAB II TINJAUAN PUSTAKA 2.1 Anatomi dan Neurofisiologi Otak II.pdf · area premotorik, area motorik...
8
BAB II
TINJAUAN PUSTAKA
2.1 Anatomi dan Neurofisiologi Otak
Otak adalah organ vital yang terdiri dari 100-200 milyar sel aktif yang
saling berhubungan dan bertanggung jawab atas fungsi mental dan intelektual
kita. Otak terdiri dari sel-sel otak yang disebut neuron (Leonard, 2008).
Otak merupakan organ yang sangat mudah beradaptasi meskipun neuron-
neuron di otak mati tidak mengalami regenerasi, kemampuan adaptif atau
plastisitas pada otak dalam situasi tertentu bagian-bagian otak dapat mengambil
alih fungsi dari bagian-bagian yang rusak. Otak sepertinya belajar kemampuan
baru. Ini merupakan mekanisme paling penting yang berperan dalam pemulihan
stroke (Feigin, 2006).
Secara garis besar, sistem saraf dibagi menjadi 2, yaitu sistem saraf pusat
dan sistem saraf tepi. Sistem saraf pusat (SSP) terbentuk oleh otak dan medulla
spinalis. Sistem saraf disisi luar SSP disebut sistem saraf tepi (SST). Fungsi dari
SST adalah menghantarkan informasi bolak balik antara SSP dengan bagian tubuh
lainnya (Noback dkk, 2005).
Otak merupakan bagian utama dari sistem saraf, dengan komponen
bagiannya adalah:
2.1.1 Humunkulus
Sistem motorik dan sensorik diatur oleh area otak tertentu. Pemetaannya
disesuaikan dengan anggota gerak yang diinervasi. Pada anggota gerak yang
9
memiliki tingkat sensitivitas yang peka dan memiliki gerak motorik yang halus,
maka memiliki area yang luas. Humunkulus dibagi menjadi 2 macam, yakni
humunkulus motorik dan humunkulus sensorik.
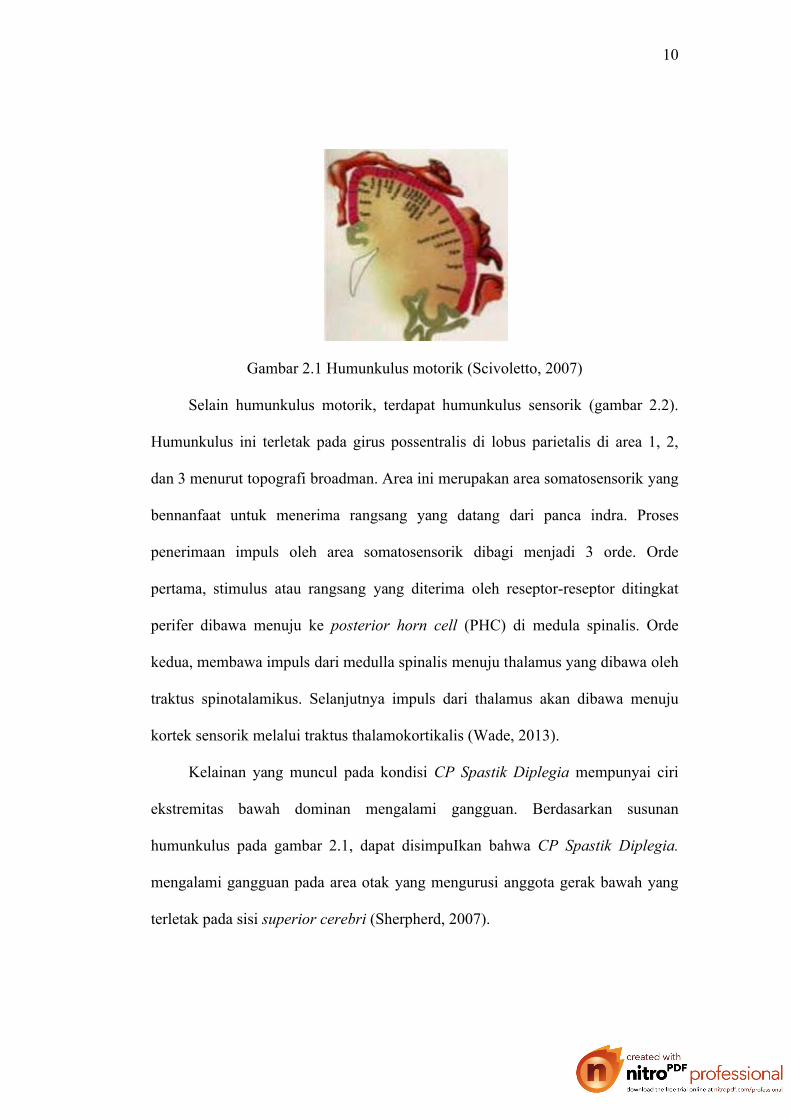
Humunkulus motorik merupakan area pergerakan tubuh yang
dipresentasikan dengan bentuk terbalik di girus presentalis. Mulai dari bawah
kearah superior adalah struktur yang berperan dalam proses menelan, lidah, dan
daerah wajah. Area berikutnya merupakan daerah luas untuk gerakan jari,
terutama ibu jari, tangan, bahu, badan (gambar 2.1). Gerakan pinggul, lutut,
pergelangan kaki dipresentasikan di area girus presentalis yang paling tinggi.
Humunkulus menggambarkan area otak yang berfungsi untuk menginervasi
bagian tubuh tertentu secara kontralateral. Humunkulus motorik berasal dari area
motorik primer (area 4 broadman) yang merupakan area otak yang berfungsi
untuk mengeksekusi gerakan. Area ini akan membentuk sebuah jalur desenden ke
medulla spinalis atau yang biasa disebut traktus piramidalis. Semakin luas area
humunkulus, maka semakin komplek pula fungsi area tubuh yang diinervasi
olehnya. Apabila area motorik ini mengalami kerusakan, maka akan menyebabkan
kelainan pada bagian tubuh yang diinervasi oleh area otak tersebut (Scivoletto,
2007)
10
Gambar 2.1 Humunkulus motorik (Scivoletto, 2007)
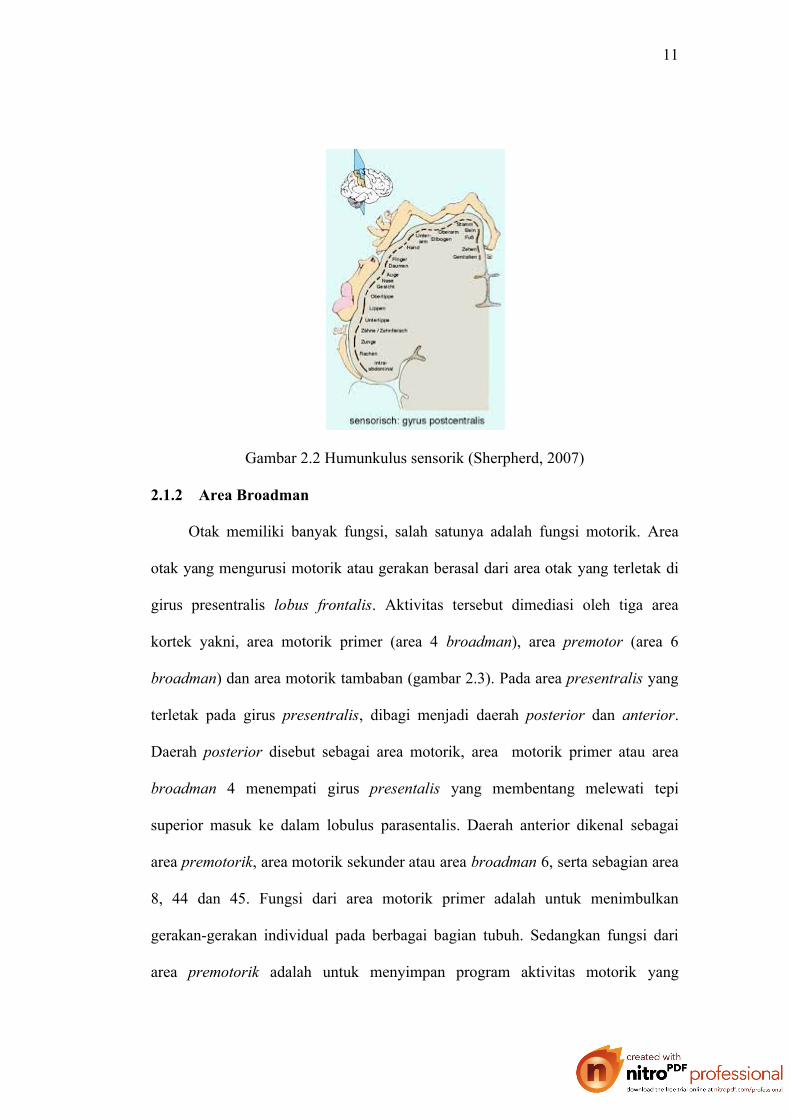
Selain humunkulus motorik, terdapat humunkulus sensorik (gambar 2.2).
Humunkulus ini terletak pada girus possentralis di lobus parietalis di area 1, 2,
dan 3 menurut topografi broadman. Area ini merupakan area somatosensorik yang
bennanfaat untuk menerima rangsang yang datang dari panca indra. Proses
penerimaan impuls oleh area somatosensorik dibagi menjadi 3 orde. Orde
pertama, stimulus atau rangsang yang diterima oleh reseptor-reseptor ditingkat
perifer dibawa menuju ke posterior horn cell (PHC) di medula spinalis. Orde
kedua, membawa impuls dari medulla spinalis menuju thalamus yang dibawa oleh
traktus spinotalamikus. Selanjutnya impuls dari thalamus akan dibawa menuju
kortek sensorik melalui traktus thalamokortikalis (Wade, 2013).
Kelainan yang muncul pada kondisi CP Spastik Diplegia mempunyai ciri
ekstremitas bawah dominan mengalami gangguan. Berdasarkan susunan
humunkulus pada gambar 2.1, dapat disimpuIkan bahwa CP Spastik Diplegia.
mengalami gangguan pada area otak yang mengurusi anggota gerak bawah yang
terletak pada sisi superior cerebri (Sherpherd, 2007).
11
Gambar 2.2 Humunkulus sensorik (Sherpherd, 2007)
2.1.2 Area Broadman
Otak memiliki banyak fungsi, salah satunya adalah fungsi motorik. Area
otak yang mengurusi motorik atau gerakan berasal dari area otak yang terletak di
girus presentralis lobus frontalis. Aktivitas tersebut dimediasi oleh tiga area
kortek yakni, area motorik primer (area 4 broadman), area premotor (area 6
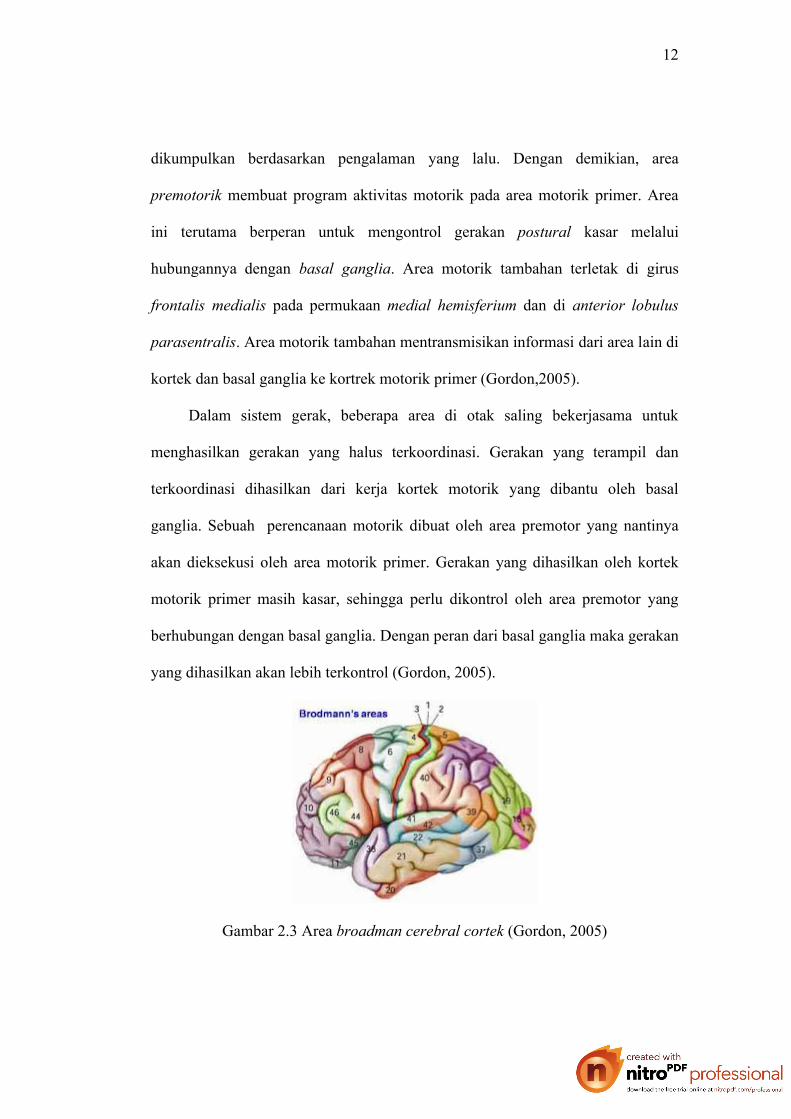
broadman) dan area motorik tambaban (gambar 2.3). Pada area presentralis yang
terletak pada girus presentralis, dibagi menjadi daerah posterior dan anterior.
Daerah posterior disebut sebagai area motorik, area motorik primer atau area
broadman 4 menempati girus presentalis yang membentang melewati tepi
superior masuk ke dalam lobulus parasentalis. Daerah anterior dikenal sebagai
area premotorik, area motorik sekunder atau area broadman 6, serta sebagian area
8, 44 dan 45. Fungsi dari area motorik primer adalah untuk menimbulkan
gerakan-gerakan individual pada berbagai bagian tubuh. Sedangkan fungsi dari
area premotorik adalah untuk menyimpan program aktivitas motorik yang
12
dikumpulkan berdasarkan pengalaman yang lalu. Dengan demikian, area
premotorik membuat program aktivitas motorik pada area motorik primer. Area
ini terutama berperan untuk mengontrol gerakan postural kasar melalui
hubungannya dengan basal ganglia. Area motorik tambahan terletak di girus
frontalis medialis pada permukaan medial hemisferium dan di anterior lobulus
parasentralis. Area motorik tambahan mentransmisikan informasi dari area lain di
kortek dan basal ganglia ke kortrek motorik primer (Gordon,2005).
Dalam sistem gerak, beberapa area di otak saling bekerjasama untuk
menghasilkan gerakan yang halus terkoordinasi. Gerakan yang terampil dan
terkoordinasi dihasilkan dari kerja kortek motorik yang dibantu oleh basal
ganglia. Sebuah perencanaan motorik dibuat oleh area premotor yang nantinya
akan dieksekusi oleh area motorik primer. Gerakan yang dihasilkan oleh kortek
motorik primer masih kasar, sehingga perlu dikontrol oleh area premotor yang
berhubungan dengan basal ganglia. Dengan peran dari basal ganglia maka gerakan
yang dihasilkan akan lebih terkontrol (Gordon, 2005).
Gambar 2.3 Area broadman cerebral cortek (Gordon, 2005)
13
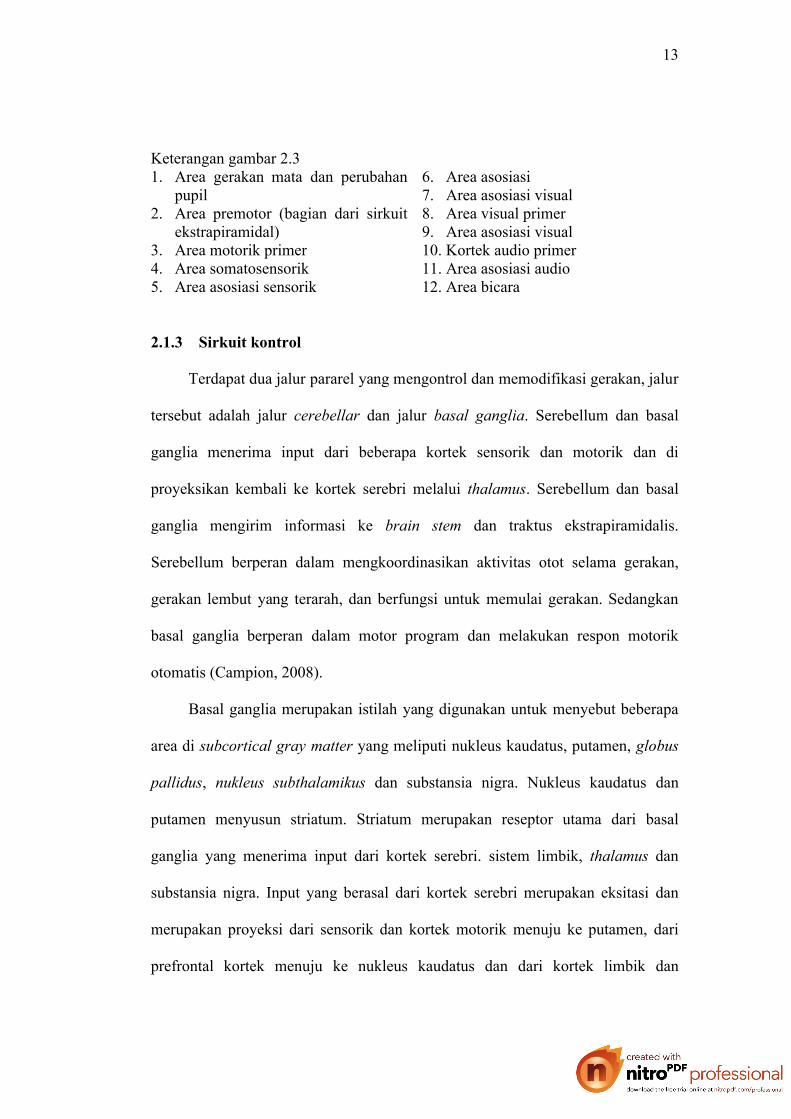
Keterangan gambar 2.31. Area gerakan mata dan perubahan
pupil2. Area premotor (bagian dari sirkuit
ekstrapiramidal)3. Area motorik primer4. Area somatosensorik5. Area asosiasi sensorik
6. Area asosiasi7. Area asosiasi visual8. Area visual primer9. Area asosiasi visual10. Kortek audio primer11. Area asosiasi audio12. Area bicara
2.1.3 Sirkuit kontrol
Terdapat dua jalur pararel yang mengontrol dan memodifikasi gerakan, jalur
tersebut adalah jalur cerebellar dan jalur basal ganglia. Serebellum dan basal
ganglia menerima input dari beberapa kortek sensorik dan motorik dan di
proyeksikan kembali ke kortek serebri melalui thalamus. Serebellum dan basal
ganglia mengirim informasi ke brain stem dan traktus ekstrapiramidalis.
Serebellum berperan dalam mengkoordinasikan aktivitas otot selama gerakan,
gerakan lembut yang terarah, dan berfungsi untuk memulai gerakan. Sedangkan
basal ganglia berperan dalam motor program dan melakukan respon motorik
otomatis (Campion, 2008).
Basal ganglia merupakan istilah yang digunakan untuk menyebut beberapa
area di subcortical gray matter yang meliputi nukleus kaudatus, putamen, globus
pallidus, nukleus subthalamikus dan substansia nigra. Nukleus kaudatus dan
putamen menyusun striatum. Striatum merupakan reseptor utama dari basal
ganglia yang menerima input dari kortek serebri. sistem limbik, thalamus dan
substansia nigra. Input yang berasal dari kortek serebri merupakan eksitasi dan
merupakan proyeksi dari sensorik dan kortek motorik menuju ke putamen, dari
prefrontal kortek menuju ke nukleus kaudatus dan dari kortek limbik dan
14
amigdala menuju ke ventral striatum. Basal ganglia memiliki sejumlah lintasan
yakni (1) dari striatum ke globus pallidus ke thalamus ke kortek dan ke striatum,
(2) dari striatum ke substansia nigra dan ke striatum, (3) dari globus pallidus ke
subthalamus dan berakhir ke globus pallidus (Campion, 2008).
Input kortikal dari basal ganglia kebanyakan menggunakan
neurostransmitter glutamate. Striatum merupakan area di otak yang paling kaya
mengandung dua neurotransmitter yang penting didanalam system saraf pusat
yakni achetylchline dan dopamine. Acetylcholine merupakan neurotransmitter
pada sinaps di kebanyakan saraf, sedangkan dopamine diproduksi di substansia
nigra dan disalurkan ke striatum melalui akson nigrostriatal. untuk bekerja pada
striatum. Apabila terjadi kerusakan pada substansia nigra, maka akan
menyebabkan penurunan level dopamine pada striatum. Aktivitas basal ganglia
dimodulasi oleh neuron dopaminergic di substansia nigra. Dopamine memiliki
efek eksitasi pada neuron striatal pada jalur langsung dan efek inhibisi pada jalur
tidak langsung. Jalur langsung terdiri dari putamen nukleus kaudatus, dan striatum
menghasilkan inhibisi pada globus pallidus dan sebagai konsekuensinya
disinhibisi dari thalamus, superior kullikulus dan target lainnya. Jalur tidak
langsung yang terdiri dari nukleus subtalamik menghasilkan eksitasi dari output
saraf dari globus pallidus yang akan meningkatkan inhibisi pada organ target
(Campion, 2008).
Basal ganglia berperan dalam motor kontrol dan tindakan' otomatis dari
ketrampilan motorik yang bertindak dengan memfasilitasi penggunaan
perencanaan motorik. Basal ganglia tidak berfungsi untuk memulai gerakan,
15
namun berfungsi memodulasi pola gerakan yang telah dimulai pada level kortikal
Perobaban aktivitas antara jaIur langsung dan jalur tidak langsung, fungsi eksitasi
dan inhibisi dari sirkuit basal ganglia mendasari berbagai macam permasalahan
gerak termasuk diantaranya hypo/dnetic dan hyperkinetic movement disorder
(Gordon, 2005).
Serebelum berfungsi untuk mengawali dan mengatur gerakan, khususnya
gerakan yang terampil. Serebelum berfungsi sebagai pembanding antara
perencanaan motorik dan basil dari motorik, selain itu serebelum juga berfungsi
untuk mendeteksi kesalahan sistem. Serebelum mengirim sinyal untuk koreksi ke
brain stem dan kortek motorik. Pada serebelum terdapat tiga divisi fungsional
yakni vestibuloserebellum, spinoserebellum, dan serebroserebellum (Dorlan,
2009)
Vestibuloserebellum berfungsi untuk mengontrol dan mengkoordinasi otot-
otot aksial dan gerakan kepala dan mata, spinoserebellum berfungsi untuk
memberikan informasi motorik dan eksitabilitas motor neuron, serebroserebelum
berfungsi untuk mengawali gerakan dan koordinasi otot (Hesse, 2008).
2.1.4 Sistem piramidal
Sistem piramidal atau biasa yang disebut traktus kortikospinalis merupakan
jalur neuron tunggal yang keluar dari kortek serebri menuju ke medula spinalis
tanpa membentuk sinaps. Fungsi utama dari sistem ini adalah untuk melakukan
gerakan volunter dan gerakan terampil dibawah kontrol kesadaran. Sistem
piramidal membawa input dari area motorik primer, area premotor, areamotorik
tambahan. Impuls yang dimunculkan oleh kortek motorik berasal dari impuls
16
yang diterima dari kortek sensorik yang menerima stimulus astu rangsang yang
diterima oleh sarafsensorik yang berada di perifer. Serabut saraf piramidalis
menyilang ke sisi yang berlawanan pada medula oblongata. Pada sistem piramidal
terdapat 2 macam neurotransmitter yang berperan penting, yakni
neurotransmitter glutamate yang berfungsi sebagai eksitasi dan neurotransmitter
gamma-aminobutyric acid (GABA) yang berfungsi sebagai inhibitor (Levitt,
2013).
Lesi traktus piramidal ditandai dengan (1) adanya tanda babinski yang
ditandai dengan dorsi fleksi ibu jari kaki dan jari lainnya bergerak keluar ketika
kulit telapak kaki sepanjang sisi lateral digores, (2) hilangnya reflek abdominalis
superfisial otot abdominal gagal berkontraksi otot-otot kremaster gagal
berkontraksi ketika kulit pada sisi medial paha digores, (3) hilangnya penampakan
gerakan-gerakan volunter terlatih yang halus terutama terjadi pada ujung-ujung
distal anggota gerak (Dorlan, 2009).
2.1.5 Sistem Ekstrapiramidal
Komponen dari sistem ekstrapiramidal adalah jalur desenden brain stem.
Jalur desenden brain stem dikelompokkan menjadi dua grup fungsional, yakni
jalur medial dan lateral. Jalur medial berfungsi untuk mengontrol postur, pola
sinergis ekstensor pada seluruh ekstermitas dan gerakan orientasi dari kepala dan
badan. Jalur mempunyai kapasitas untuk gerakan fleksor yang independen
khususnya pada lengan (Rosenbaum,2007).
Jalur desenden brain stem medial meliputi medullary retikulospinal,
vestibulospinal, dan tektospinal. Medullary retikulospinal berasal dari neuron di
17
formasio retikularis. Aktivitas pada bagian ini adalah inhibisi dari ekstensor motor
neuron, eksitasi fleksor motor neuron dan menginhibisi tendon reflek.
Vestibulospinal berasal dari nukleus vestibularis. Nukleus vestibularis merupakan
sumber dari kebanyakan proyeksi vestibular ke spinal motor neuron. Nukleus ini
menerima input aferen dari saraf vestibularis dan input lain dari serebelum.
Aktivitas pada nukleus ini memproduksi eksitasi ekstensor motor neuron. Traktus
vestibulospinal yang berasal dari nukleus vetibular lateralis tidak turun menyilang
di ventral funikulus medulla spinalis. Serabut saraf ini berakbir di bagian anterior
hom cell (AHC) pada. alpha motor neuron dan gamma motor neuron. Sedangkan
traktus tektospinal penting untuk mediasi gerakan retlek kepala terhadap stimulus
visual dan audio (Rosenbaum, 2007).
Jalur desenden brain stem sisi lateral meliputi traktus rubrospinal yang
berasal dari red nucleus, dan traktus pontin retikulospinal yang berasal dari
dorsolateral formasio pontin reticular. Aktivitas pada bagian formasio retikularis
memproduksi eksitasi ekstensor motor neuron dan menginhibisi fleksor motor
neuron (Rosenbaum, 2007).
Secara umum respon gamma motor neuron terhadap stimulus sama dengan
alpha motor neuron yang menginervasi otot-otot ekstensor yang dieksitasi oleh
traktus vestibulospinal dan traktus pontin retikulospinal. Gamma motor neuron
mempunyai threshold yang lebih rendah dibanding alpha motor neuron. Sehingga
stimulus yang tidak mampu mengeksitasi alpha motor neuron, mampu
mengeksitasi gamma motor neuron dan stimulus yang mampu mengeksitasi alpha
18
motor neuron mungkin akan membuat eksitasi gamma motor neuron yang
berlebihan (Rosenbaum, 2007).
Sel saraf mempunyai kemampuan khusus yaitu merambatkan impuls dengan
mekanisme mensintesis asetilkolin dan zat adrenergic sebagai neurotransmitter
untuk memindahkan impuls ke saraf lain. Kecepatan metabolism lebih tinggi
dibandingkan sel tubuh lainnya, sehingga membutuhkan Oksigen dan glukosa
yang tinggi. Sel saraf mempunyai tonjolan yang disebut dendrit sebagai penerima
rangsang. Komponen penerima rangsang adalah dendrit, badan sel dan pangkal
akson (Rosenbaum, 2007).
Membran sel ada 2 lapis yang melindungi sel dengan komposisi yang
berbeda di tiap selnya. Ketebalannya antara 90-100 A, di tiap bagian terdapat
lapisan lagi yang melindungi bagian penting sel misalnya, mitochondria dan inti
sel. Sedangkan inti sel mengandung banyak sekali DNA dan RNA serta sebagai
pembentuk protein dan asam nukleat di sel yang digunakan sebagai aktifitas
metabolism sel untuk menghasilkan enzim sebagai kebutuhan respirasi sel
diantaranya ATP, glukosa phospat, alkalin phospat, dan lain-lain. Ukurannya
bervariasi tergantung pada aktifitasnya (Rosenbaum, 2007).
Transmisi impuls saraf merupakan fungsi utama saraf yaitu membawa pesan
dari dan ke sistem saraf. Serabut saraf dilapisi dengan selubung myelin sehingga
perintah ke masing-masing bagian tubuh tidak saling mempengaruhi. Rangsangan
terpeka adalah rangsangan listrik, diketemukan oleh Galvanik melalui percobaan
2 lempeng listrikarus baterai kering (Rosenbaum, 2007).
19
Mekanisme transmisi saraf melalui kecepatan perambatan 100 m/detik dan
pada keadaan reflek 1/1000 detik. Na+ masuk ke sel dengan energi potensial,
disusul keluarnya ion K+ dari sel dengan proses metabolisme. Saat istirahat akan
terjadi perembesan ion dari konsentrasi tinggi ke konsentrasi rendah di sel. Saat
rangsangan ion Na+ masuk dengan suatu energi, disusul keluarnya ion K+ , saat
istirahat terjadi perembesan ion sebaliknya (Gordon, 2005)
Kecepatan perambatan arus impuls saraf dipengaruhi oleh beberapa factor
diantaranya yaitu diameter akson, ada tidaknya selubung akson dan suhu akson.
Pada neuron yang tidak mempunyai selubung akson rambatan impuls akan terjadi
seltatory theory yaitu rambatan akan meloncat dari satu impuls ke impuls lainnya
melalui nodus ranvier yang ada (Gordon, 2005).
2.2 Kontrol Postural
2.2.1 Pengertian
Secara terminologi kontrol postural dapat diartikan mekanisme tubuh untuk
mempertahankan dirinya agar tetap seimbang dan tidak jatuh, sedangkan kontrol
antigravitasi adalah kemampuan tubuh untuk menjaga tubuh tetap tegak dalam
posisi tertentu. Kontrol postural mempunyai hubungan yang erat dengan kontrol
motor karena pada perkembangan motor, gerakan tubuh yang tidak bermakna
lebih dulu ada sebelum munculnya kestabilan gerak, baru kemudian muncul
mobilitas gerak yang terkontrol (Odunaiya, 2009).
Na+
Cl- Na+
K+K + Cl
20
Kontrol postural merupakan prasyarat performa motor yang efisien. Postur
tergantung pada kapabilitas daya tahan kontraksi otot, sedangkan gerakan sering
memerlukan kecepatan dan kekuatan otot. Selama tubuh berdiri tegak, subjek
normal mengontrol postur tegaknya dengan gerakan-gerakan yang kecil yang
terbentuk di bagian-bagian tubuh yang berbeda. Posisi yang optimal selama
berdiri dengan seimbang memerlukan pengaturan letak center of gravity (COG),
misalnya untuk mengatasi agar tidak terjadi goyahan tubuh kearah lateral, kaki
diposisikan sedikit membuka. Dalam berdiri dengan seimbang pun diperlukan
kemampuan untuk berpindah dari posisi berdiri seimbang tanpa menggunakan
bantuan lengan. Hal ini termasuk dalam kemampuan untuk menggeser berat
badan kearah lateral dan anterioposterior dan untuk membuat gerakan kearah
vertikal lebih fleksibel. Aktivitas postural spesifik untuk tugas-tugas
keseimbangan, dan selama berdiri tegak, tidak memerlukan aktivasi otot secara
volunter (Kejonen, 2009).
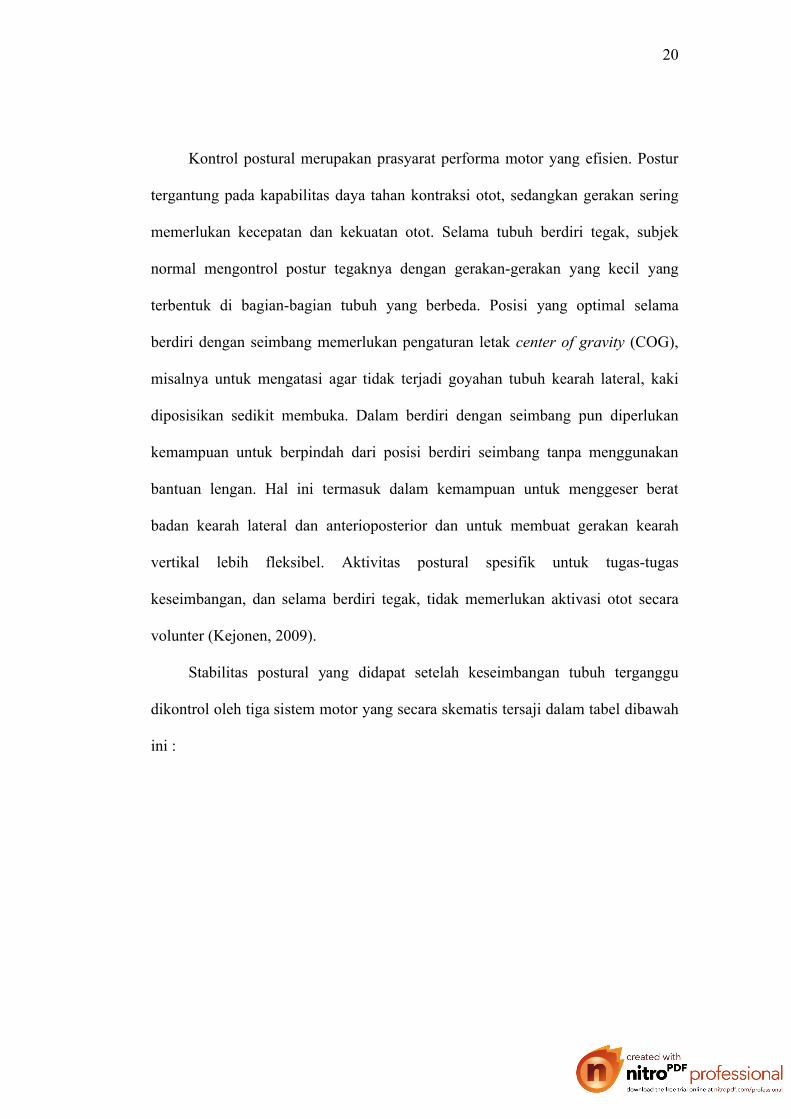
Stabilitas postural yang didapat setelah keseimbangan tubuh terganggu
dikontrol oleh tiga sistem motor yang secara skematis tersaji dalam tabel dibawah
ini :
21
TABEL 2.1VARIABEL SISTEM MOTOR DALAM KONTROL
GERAK YANG SEIMBANG
Sistem motorReflek Otomatis Volunter
Asal Spinal Batang otak Kortikal
Aktivasi Stimulus eksternal Stimulus eksternalStimulus eksternal
Self-generator
ResponLokal ke pusat stimulus dan stereotype
Terkoordinasi dan stereotype
Variasi tidak terbatas
Aturan dalam keseimbangan
Regulasi kekuatan otot
Adanya gangguanGerakan yang
bermaknaLamanya kaki menahan
35-45 menit 95-120 menit > 150 menit
(Sumber : Kejonen, 2009)
Respon motor yang pertama adalah reflek spinal. Peran dari Stretch reflek
adalah untuk mendapatkan kembali stabilitas postural dengan respon otot yang
cepat. Gerakan-gerakan yang mengancam keseimbangan badan dideteksi oleh
propioseptor pada tendon dan otot, yang mengawali aksi otot yang pertama
dengan mengkontraksikan otot-otot tertentu pada seluruh tubuh. Reflek tidak
berkontribusi secara langsung pada perbaikan keseimbangan. Respon yang
pertama untuk menahan agar tubuh tidak jatuh merupakan reaksi otomatis.
Reaksi-reaksi ini dikoordinir dan disampaikan melalui reflek-reflek
vestibulospinal dan mempengaruhi semua otot pada kedua tungkai, trunk, dan
leher (Kejonen, 2009).
Reaksi gerak refleksif dan gerak otomatis mempunyai mekanisme yang
kontras, sedangkan gerak volunter merupakan gerakan yang disadari dan geraknya
sangat bervariasi. Penyesuaian postur memindahkan posisi COG secara volunter.
Contohnya, abduksi lengan kanan menyebabkan COG bergeser kearah kanan.
22
Perintah dari SSP
Gerakan ekstremitas
Gangguan postur
Penyesuaian postur
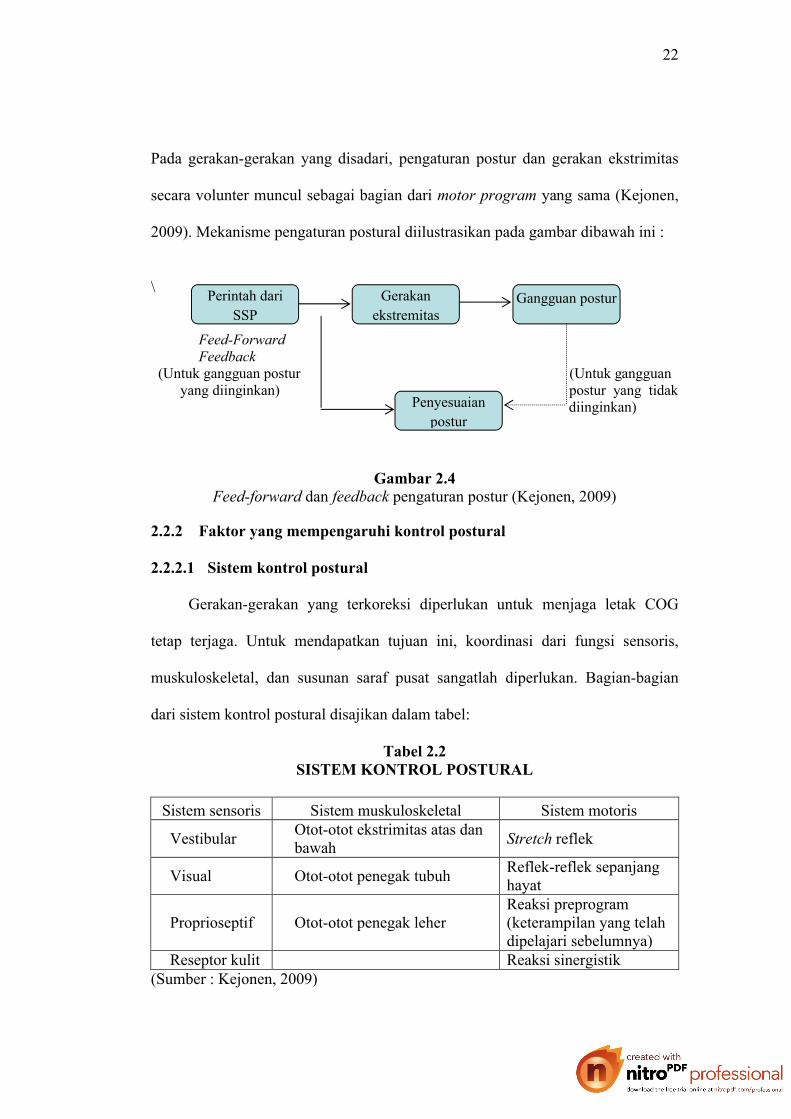
Pada gerakan-gerakan yang disadari, pengaturan postur dan gerakan ekstrimitas
secara volunter muncul sebagai bagian dari motor program yang sama (Kejonen,
2009). Mekanisme pengaturan postural diilustrasikan pada gambar dibawah ini :
\
Feed-ForwardFeedback
(Untuk gangguan postur (Untuk gangguan yang diinginkan) postur yang tidak
diinginkan)
Gambar 2.4Feed-forward dan feedback pengaturan postur (Kejonen, 2009)
2.2.2 Faktor yang mempengaruhi kontrol postural
2.2.2.1 Sistem kontrol postural
Gerakan-gerakan yang terkoreksi diperlukan untuk menjaga letak COG
tetap terjaga. Untuk mendapatkan tujuan ini, koordinasi dari fungsi sensoris,
muskuloskeletal, dan susunan saraf pusat sangatlah diperlukan. Bagian-bagian
dari sistem kontrol postural disajikan dalam tabel:
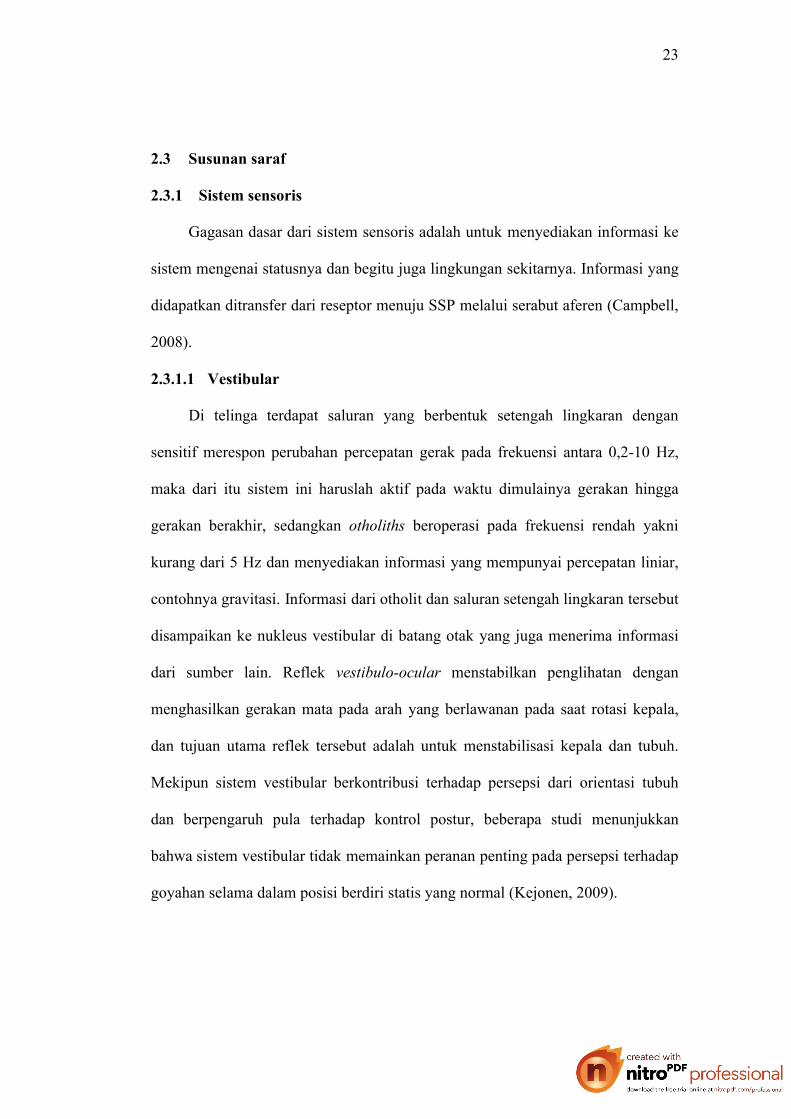
Tabel 2.2SISTEM KONTROL POSTURAL
Sistem sensoris Sistem muskuloskeletal Sistem motoris
VestibularOtot-otot ekstrimitas atas dan bawah
Stretch reflek
Visual Otot-otot penegak tubuhReflek-reflek sepanjang hayat
Proprioseptif Otot-otot penegak leherReaksi preprogram(keterampilan yang telah dipelajari sebelumnya)
Reseptor kulit Reaksi sinergistik(Sumber : Kejonen, 2009)
23
2.3 Susunan saraf
2.3.1 Sistem sensoris
Gagasan dasar dari sistem sensoris adalah untuk menyediakan informasi ke
sistem mengenai statusnya dan begitu juga lingkungan sekitarnya. Informasi yang
didapatkan ditransfer dari reseptor menuju SSP melalui serabut aferen (Campbell,
2008).
2.3.1.1 Vestibular
Di telinga terdapat saluran yang berbentuk setengah lingkaran dengan
sensitif merespon perubahan percepatan gerak pada frekuensi antara 0,2-10 Hz,
maka dari itu sistem ini haruslah aktif pada waktu dimulainya gerakan hingga
gerakan berakhir, sedangkan otholiths beroperasi pada frekuensi rendah yakni
kurang dari 5 Hz dan menyediakan informasi yang mempunyai percepatan liniar,
contohnya gravitasi. Informasi dari otholit dan saluran setengah lingkaran tersebut
disampaikan ke nukleus vestibular di batang otak yang juga menerima informasi
dari sumber lain. Reflek vestibulo-ocular menstabilkan penglihatan dengan
menghasilkan gerakan mata pada arah yang berlawanan pada saat rotasi kepala,
dan tujuan utama reflek tersebut adalah untuk menstabilisasi kepala dan tubuh.
Mekipun sistem vestibular berkontribusi terhadap persepsi dari orientasi tubuh
dan berpengaruh pula terhadap kontrol postur, beberapa studi menunjukkan
bahwa sistem vestibular tidak memainkan peranan penting pada persepsi terhadap
goyahan selama dalam posisi berdiri statis yang normal (Kejonen, 2009).
24
2.3.1.2 Visual
Informasi visual dikirim dari retina setidaknya ke dua tempat yang berbeda
di otak dan dengan tujuan yang berbeda pula yakni, sistem fokal untuk identifikasi
obyek dan ambient-system untuk kontrol gerak. Pada kemudiannya juga
menunjukkan bahwa hal tersebut mempengaruhi kestabilan dan keseimbangan
tubuh. Penglihatan sangat penting untuk kontrol postur dan berpengaruh terhadap
keseimbangan dengan bereaksi untuk bergerak sejalan dengan pergeseran
gambaran relatif pada retina, dan juga memicu aktivasi otot yang diperlukan untuk
mengkoreksi postur. Efisiensi visual terhadap kontrol postural tergantung pada
ketajaman visual dan jarak benda, yang mana paling baik adalah benda dengan
jarak kurang dari 2m, dan kualitas penerangan. Hal ini telah dilaporkan bahwa
ketika horison dimanipulasi, maka isyarat visual dan vestibular saling
bertentangan, lansia lebih menaruh kepercayaannya pada isyarat penglihatan
daripada orang yang lebih muda (Kejonen, 2009).
2.3.1.3 Proprioseptif
Sistem somatosensoris memberikan informasi yang berhubungan dengan
posisi tubuh oleh proprioseptor dan reseptor eksteroseptif. Reseptor proprioseptif
terletak di otot, tendon, dan sendi, dan mereka memberikan informasi tentang
posisi ekstrimitas dan tubuh serta peningkatan tensi pada masing-masing otot.
Proprioseptor terdapat pada perut otot (tipe Ia dan II), golgi tendon (Ib), dan
reseptor sendi. Informasi eksteroreseptif diperoleh dari tipe reseptor tepi yang
berbeda di telapak kaki. Reseptor eksteroreseptif terletak di jaringan kutan dan
subkutan. Reseptor kulit yang paling utama adalah Meissner corpuscles dan
25
Merkel disks, yang terletak paling dekat dengan permukaan kulit, serta Ruffini-
ending dan Pacinian corpuscles, yang letaknya lebih dalam (Kejonen, 2009).
Reseptor pada kapsul sendi memberikan informasi tentang gerak dan
posisi relatif dari sendi tersebut. Sedangkan pada perut otot memberikan informasi
tentang perubahan panjang dan tensi otot (penguluran dinamis), serta dapat pula
diaktivasi dengan mengulur otot yang bersangkutan secara pasif. Sebagai
tambahan pada sistem aferen, serabut intrafusal di perut otot juga menerima input
eferen via γ-motoneuron. Reseptor tepi mendeteksi ayunan tubuh, sedangkan
mekanoreseptor dapat membedakan lokasi dan kecepatan perlekukkan kulit,
seperti halnya percepatan dan perubahan tekanan (Kejonen, 2009).
Ada beberapa input penting untuk kontrol postural selama berdiri yang
dihasilkan oleh proprioseptor. Pertama, informasi dari sendi pergelangan kaki
harus dikenali, sebagaimana hal tersebut diakibatkan oleh gerakan pusat gravitasi,
menghasilkan torsi disekitar sendi pergelangan kaki. Kedua, informasi dari otot
leher memberikan acuan penting mengenai gerakan kepala dalam hubungannya
dengan tubuh. Dan ketiga, otot-otot mata menggambarkan posisi mata dalam
hubungannya dengan kepala (Kejonen, 2009).
2.3.2 Sistem motoris
Beberapa bagian dari SSP yang terdiri dari medula spinalis dan otak turut
ambil bagian dalam mengontrol postur. Stimulus ke neuron kortikal sebagian
besar datang dari nuklei di thalamus yang mentransmisikan informasi dari medula
spinalis, bangsal ganglia, dan cerebellum, serta dari area korteks frontal dan
parietal. Respon yang paling pertama dan paling cepat untuk merubah posisi
26
ketika berdiri dipicu oleh reflek-reflek spinal. Gerak volunter yang diperlukan
untuk menyeimbangkan postur direncanakan oleh otak. Perintah dari otak dikirim
ke otot melalui sistem piramidal dan ekstrapiramidal. Stimulus yang keluar dari
area korteks motor juga diproyeksikan ke bangsal ganglia, cerebrum, dan nukleus
berwarna merah. Bangsal ganglia mengambil peran dalam fasilitasi dan
perencanaan gerak reflek dan volunter selama mengontrol postur. Cerebellum dan
koneksinya beranggung jawab terhadap koordinasi dan kehalusan gerak reflek,
dan regulasi dari gerakan volunter (Kejonen, 2009).
2.4 Sistem muskuloskeletal
Meskipun otot-otot betis lebih dahulu teraktivasi untuk memberikan kontrol
postural selama tubuh bergerak, ko-aktivasi dari otot postural yang paling utama
seperti otot leher, hamstring, soleus, dan otot-otot supraspinalis terdapat dalam
kebutuhan ini. Terlepas dari masalah ini, bagaimanapun beberapa otot lain juga
berpartisipasi dalam dihasilkannya gerakan-gerakan reflektif dengan waktu laten
yang berbeda dan gerakan-gerakan volunter untuk menyeimbangkan posisi tubuh.
Kapanpun otot terulur, reseptor proprioseptif dalam otot dan tendon memberikan
sinyal mengenai perubahan panjang otot ke mekanisme sentral dari sistem kontrol
postural (Kejonen, 2009).
Kontrol postural memerlukan koordinasi dari kontraksi otot. Sebagaimana
otot bekerja terhadap sendi dalam menyeimbangkan tubuh, khususnya peran sendi
pergelangan kaki, lutut, dan panggul sangatlah penting. Bagaimanapun, peneliti-
peneliti lain telah menunjukkan mekanisme aktif dari stabilisasi postural pada
27
waktu berdiri dengan seimbang, dimana otot dan reseptor kulit memainkan peran
yang penting (Kejonen, 2009).
2.5 Integrasi Komponen-Komponen Berbeda Pada Sistem Kontrol
Postural
Untuk lebih memastikan bahwa kontrol postural telah memadai, stimulus
sensoris harus diintegrasikan di SSP untuk menghasilkan output yang adekuat.
Informasi sensoris dari visual, vestibular, serta proprioseptif dan sistem
eksteroreseptif digunakan sebagai input.
Jean (2006) mendemonstrasikan bahwa meskipun tidak ada feedback dari
perifer, serabut aferen memicu stretch refleks, sedangkan pada level yang lebih
tinggi di SSP, hubungan antar neuron menjembatani respon gerak yang lebih
rumit. Pada efektor, prasyarat yang penting untuk menyeimbangkan tubuh adalah
kemampuan untuk memilih respon yang lebih tepat, untuk memodifikas respon-
respon tersebut pada basis dari input sensoris, dan akhirnya untuk menghasilkan
kebutuhan akan kontraksi otot untuk menjaga postur.
2.6 Cerebral Palsy (CP)
2.6.1 Definisi
Cerebral palsy (CP) adalah suatu kerusakan jaringan otak yang menetap
tidak progresif, meskipun gambaran klinis dapat berubah selama hidup, terjadi
pada usia dini dan menghalangi perkembangan otak normal dengan menunjukkan
kelainan postur dan pergerakan disertai kelainan neurologis berupa gangguan pada
cortex cerebri, ganglia basalis dan cerebellum (Yenita, 2010). Menurut Shepherd
(2005) CP didefinisikan sebagai sekumpulan kelainan otak non progresif yang
28
menyebabkan lesi atau perkembangan yang abnormal pada kehidupan janin atau
awal masa anak-anak. Miller dan Bachrach (2008) mendefinisikan CP sebagai
sekumpulan gangguan motorik yang diakibatkan dari kerusakan pada otak yang
terjadi sebelum, selama dan sesudah kelahiran. Kerusakan otak pada anak
mempengaruhi sistem motorik dan akibatnya anak tersebut mempunyai koordinasi
yang lemah, keseimbangan yang lemah, pola gerak yang abnormal atau gabungan
dari karakteristik tersebut.
Dalam kamus kedokteran Dorlan (2009) definisi CP yaitu setiap kelompok
gangguan motorik yang menetap, tidak progresif, yang terjadi pada anak kecil
yang disebabkan oleh kerusakan otak akibat trauma lahir atau patologi intra
uterine. Gangguan ini ditandai dengan perkembangan motorik yang abnormal atau
terlambat, seperti paraplegia spastik, hemiplegia atau tetraplegia, yang sering
disertai dengan retardasi mental, kejang atau ataksia.
Definisi spastik menurut kamus kedokteran Dorlan (2009) adalah bersifat
atau ditandai dengan spasme. Hipertonik, dengan demikian otot-otot kaku dan
gerakan kaku.
Diplegia adalah paralisis yang menyertai kedua sisi tubuh, paralisis
bilateral. Diplegia merupakan salah satu bentuk CP yang utamanya mengenai
kedua belah kaki (Dorlan, 2005).
Dari uraian di atas dapat disimpulkan bahwa CP Spastik Diplegia adalah
suatu gangguan tumbuh kembang motorik anak yang disebabkan karena adanya
kerusakan pada otak yang terjadi pada periode sebelum, selama dan sesudah
kelahiran yang ditandai dengan kelemahan pada anggota gerak bawah yang lebih
29
berat dari pada anggota gerak atas, dengan karakteristik tonus postural otot yang
tinggi terutama pada regio trunk bagian bawah menuju ekstremitas bawah. Pada
CP spastik diplegia kadang-kadang disertai dengan retardasi mental, kejang dan
gambaran ataksia (Niklasson, 2010).
2.6.2 Etiologi
Penyebab CP secara umum dapat terjadi pada tahap prenatal, perinatal,
pascanatal.
2.6.2.1 Prenatal
Infeksi terjadi dalam masa kandungan, menyebabkan kelainan pada janin,
misalnya oleh infeksi pada saat kehamilan (lues, toksoplasma, rubella dan
penyakit inklusi sitomegalik). Anoksia dalam kandungan (anemia, kerusakan pada
plasenta), terkena radiasi sinar-X dan keracunan kehamilan dapat menimbulkan
CP. Kelainan yang mencolok biasanya gangguan pergerakan dan retardasi mental.
2.6.2.2 Perinatal
2.6.2.2.1 Anoksia/hipoksia
Penyebab yang terbanyak ditemukan dalam masa perinatal ialah
braininjury. Keadaan inilah yang menyebabkan terjadinya anoksia. Hal ini
terdapat pada kelahiran bayi abnormal, disporposi sefalo pelvik, partus lama,
plasenta previa, infeksi plasenta, partus menggunakan bantuan instrumen tertentu
dan lahir dengan bedah caesar.
2.6.2.2.2 Perdarahan otak
Perdarahan dan anoksia dapat terjadi bersama-sama, sehingga sukar
membedakannya. Perdarahan dapat terjadi di ruang sub arachnoid yang akan
30
menyebabkan penyumbatan cairan cerebro spinalis sehingga mengakibatkan
hidrocephalus. Perdarahan di ruang subdural dapat menekan korteks serebri
sehingga timbul kelumpuhan spastik.
2.6.2.2.3 Ikterus
Ikterus pada masa neonatal dapat menyebabkan kerusakan jaringan otak
yang permanen akibat masuknya bilirubin ke ganglia basalis, misalnya pada
kelainan inkompatibilitas golongan darah.
2.6.2.2.4 Meningitis purulenta
Meningitis purulenta pada masa bayi bila terlambat atau tidak tepat
pengobatannya akan mengakibatkan gejala sisa berupa CP.
2.6.2.2.5 Prematuritas
Prematuritas dapat diartikan sebagai kelahiran kuarang bulan, lahir dengan
berat badan tidak sesuai dengan usia kelahiran atau terjadi dua hal tersebut. Bayi
kurang bulan mempunyai kemungkinan menderita perdarahan otak lebih banyak
dibandingkan bayi cukup bulan, karena pembuluh darah, enzim, faktorpembekuan
darah dan lain-lain masih belum sempurna. Pada pasien cerebral palsy spastik
diplegia biasanya terjadi pada kasus kelahiran prematur, berat badan lahir rendah
dan anoksia berat pada saat kelahiran (Nugroho, 2005).
2.6.2.3 Pascanatal
Kerusakan yang terjadi pada jaringan otak yang menganggu perkembangan
dapat menyebabkan CP. Misalnya pada trauma kapitis, meninngitis, ensepalitis,
dan luka parut pada otak pasca bedah. Bayi dengan berat badan lahir rendah juga
berpotensi mengalami CP.
31
2.6.2.4 Patologi
CP spastik diplegia dari beberapa literatur diasumsikan oleh karena adanya
haemorhage dan periventricular leukomalacia pada area subtansia alba atau
kortek motor. Haemorhage dan periventricular leukomalacia merupakan
gambaran klinis cerebral palsy. Periventricular leukomalacia adalah necrosis dari
white matter sekitar ventrikel akibat dari menurunnya kadar oksigen dan arus
darah pada otak yang biasanya terjadi pada spastik diplegi. Periventricular
leukomalacia sering terjadi bersamaan dengan lesi haemoragic dan potensi terjadi
selama apnoe pada bayi prematur. Baik periventricular leukomalacia maupun lesi
haemoragic dapat menyebabkan spastik diplegi. Hal ini sekaligus menguatkan arti
patogenesis adalah kejadian kerusakan pada white matter (Nugroho, 2005).
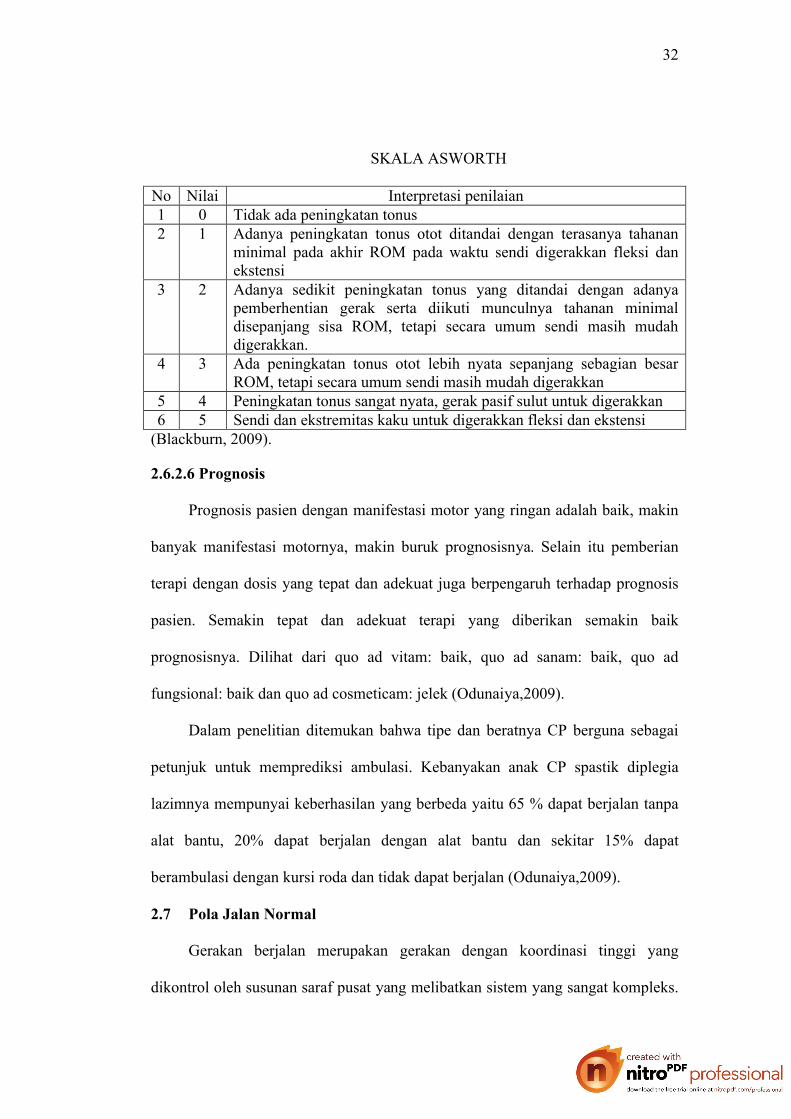
2.6.2.5 Tanda dan Gejala
Pada anak CP spastik diplegia biasanya ditandai dengan kelemahan anggota
gerak bawah. Adanya spastisitas pada tungkai bawah. Adanya gangguan
keseimbangan dan koordinasi pada gerakan ekstremitas bawah serta gangguan
pada pola jalan. Pemeriksaan spastisitas dapat dilakukan dengan menggunakan
skala Asworth dengan kriteria sebagai berikut:
32
SKALA ASWORTH
No Nilai Interpretasi penilaian1 0 Tidak ada peningkatan tonus2 1 Adanya peningkatan tonus otot ditandai dengan terasanya tahanan
minimal pada akhir ROM pada waktu sendi digerakkan fleksi dan ekstensi
3 2 Adanya sedikit peningkatan tonus yang ditandai dengan adanya pemberhentian gerak serta diikuti munculnya tahanan minimal disepanjang sisa ROM, tetapi secara umum sendi masih mudah digerakkan.
4 3 Ada peningkatan tonus otot lebih nyata sepanjang sebagian besar ROM, tetapi secara umum sendi masih mudah digerakkan
5 4 Peningkatan tonus sangat nyata, gerak pasif sulut untuk digerakkan6 5 Sendi dan ekstremitas kaku untuk digerakkan fleksi dan ekstensi
(Blackburn, 2009).
2.6.2.6 Prognosis
Prognosis pasien dengan manifestasi motor yang ringan adalah baik, makin
banyak manifestasi motornya, makin buruk prognosisnya. Selain itu pemberian
terapi dengan dosis yang tepat dan adekuat juga berpengaruh terhadap prognosis
pasien. Semakin tepat dan adekuat terapi yang diberikan semakin baik
prognosisnya. Dilihat dari quo ad vitam: baik, quo ad sanam: baik, quo ad
fungsional: baik dan quo ad cosmeticam: jelek (Odunaiya,2009).
Dalam penelitian ditemukan bahwa tipe dan beratnya CP berguna sebagai
petunjuk untuk memprediksi ambulasi. Kebanyakan anak CP spastik diplegia
lazimnya mempunyai keberhasilan yang berbeda yaitu 65 % dapat berjalan tanpa
alat bantu, 20% dapat berjalan dengan alat bantu dan sekitar 15% dapat
berambulasi dengan kursi roda dan tidak dapat berjalan (Odunaiya,2009).
2.7 Pola Jalan Normal
Gerakan berjalan merupakan gerakan dengan koordinasi tinggi yang
dikontrol oleh susunan saraf pusat yang melibatkan sistem yang sangat kompleks.
33
Gait dapat diartikan sebagai pola atau ragam berjalan dimana berjalan berpindah
tempat dan mengandung pertimbangan yang detail dan rinci yang terkait dengan
sendi dan otot (Borggrafe, 2008).
Berjalan merupakan cara untuk menempuh jarak tertentu. Berjalan adalah
hasil dari hilangnya keseimbangan pada sikap bersiri dari kedua kaki secara
berturut-turut. Setiap keseimbangan dari satu kaki hilang, diganti atau diikuti oleh
tumpuan baru kaki yang lain, sehingga terjadi keseimbangan kembali. Laju
kedepan pada peristiwa berjalan, disebabkan karena kombinasi dari tiga kekuatan
yang bekerja, yaitu:
1. Kekuatan otot yang menyebabkan tekanan pada kaki terhadap permukaan
tumpuan.
2. Gaya berat yang berusaha menarik tubuh ke depan dan ke bawah bila
terjadi ketidak seimbangan (imbalance).
3. Kekuatan momentum yang bermaksud mempertahankan tubuh yang
bergerak dalam arah yang sama dengan kecepatan yang tetap.
Kekuatan-kekuatan lain yang membantu adalah pemindahan momentum
ayunan lengan, yang semula dimaksudkan untuk membantu keseimbangan,
(Borggrafe, 2008).
2.7.1 Gait cycle
Siklus Berjalan (Gait Cycle) merupakan suatu rangkaian fungsional dengan
adanya gerakan pada satu anggota badan (Extremitas Inferior). Hal ini
berlangsung sejak kaki kanan menginjak lantai hingga kaki kanan mneginjak
lantai kembali (Meyer, 2007).
34
Dalam satu Siklus berjalan (Gait Cycle) terdiri dari 2 fase, yaitu fase
menapak (Stance phase) dan fase mengayun (Swing Phase). Menurut Christoper
(2009), fase stance 60% dan fase Swing 40% dimana setiap fase memiliki tahapan
masing-masing:
1. Stance Phase
a. Initial Contact (interval: 0-2%)
Fase ini merupakan moment ketika tumit menyentuh lantai. Initial contact
merupakan awal dari fase stance dengan posisi heel rocker. Posisi sendi pada
waktu mengakhiri gerakan ini, menentukan pola loading response.
Fase ini merupakan moment seluruh centre of gravity berada pada tingkat
terendah dan seseorang berada pada tingkat yang paling stabil. Pada periode ini
anggota bawah yang lain juga menyentuh lantai sehingga terjadi posisi double
stance.
Menyentuhnya tumit dengan lantai, memberikan bayangan yang
mengindikasikan bahwa tungkai akan bergerak, sedang tungkai yang lain berada
pada akhir terminal stance.
b. Loading Response (interval: 0-10%)
Fase ini merupakan periode initial double stance. Awal fase dilakukan
dengan menyentuh lantai dan dilanjutkan sampai kaki yang lain mengangkat
untuk mengayun.
Berat tubuh berpindah ke depan pada tungkai. Dengan tumit seperti rocker,
knee fleksi sebagai shock absorption. Saat heel rocker, ankle plantar fleksi
35
dengan kaki depan menyentuh lantai sedangkan tungkai yang berlawanan pada
posisi fase preswing
c. Midstance (interval: 10-30%)
Merupakan sebagian awal dari gerakan satu tungkai. Untuk awalan
gerakannya, kaki mengangkat dan dilanjutkan sampai berat tubuh berpindah pada
kaki yang lain dengan lurus. Saat ankle dorsal fleksi (ankle rocker) bayangan
tungkai mulai bergerak ke depan sementara knee dan hip ekstensi. Sedangkan
tungkai yang berlawanan mulai bergerak menuju fase mid-swing.
d. Terminal stance (interval: 30-50%)
Pada fase ini satu tungkai memberikan bantuan. Fase ini dimulai dengan
mengangkat tumit dan dilanjutkan sampai kaki memijak tanah. Keseluruhan pada fase
ini berat badan berpindah ke depan dari forefoot. Saat posisi ekstensi knee yang
meningkat dan akan diikuti sedikit fleksi. Dimana posisi tungkai yang lain berada
pada fase terminal swing.
Pada fase Terminal stance, centre of gravity berada di depan kaki yang
menapak jadi tekanan gravitasi akan meningkatkan lingkup dari ekstensi hip dan
dorsal fleksi ankle.
e. Preswing (interval: 50-60%)
Pada akhir fase stance adalah interval gerakan kedua double stance pada
siklus berjalan. Dimulai dari initial contact pada anggota gerak bawah
kontralateral dan diakhiri toe-off pada anggota gerak ipsilateral, dengan
meningkatnya ankle ke posisi plantar fleksi diikuti fleksi knee maka hip tidak lagi
pada posisi ekstensi. Disaat yang sama anggota gerak bawah yang lain pada fase
36
loading response. Menyentuhnya anggota gerak atau tungkai kontralateral
merupakan awal dari terminal double support.
2. Swing Phase
a. Initial swing (interval: 60-73%)
Pada fase pertama adalah perkiraan satu dari tiga fase mengayun. Diawali
dengan mengangkat kaki dari lantai dan diakhiri ketika mengayun kaki sisi
kontralateral dari kaki yang menumpu. Pada saat posisi initial swing hip bergerak
fleksi dan knee naik menjadi fleksi dan ankle pada setengah dorsalfleksi. Pada
saat yang sama, sisi kontralateral bersiap pada mid stance.
b. Mid swing (interval: 73-87%)
Pada fase kedua dari periode swing dimulai, saat mengayun anggota gerak
bawah yang berlawanan dari tungkai yang menumpu. Akhir dari fase ini ketika
tungkai mengayun ke depan dan tibia vertikal atau lurus. Saat mid-swing, hip
fleksi dengan knee bergerak ekstensi untuk merespon gravitasi, dan diikuti dengan
ankle dorsifleksi menuju posisi netral. Sedangkan tungkai yang lain berada pada
akhir dari fase midstance.
c. Terminal swing (interval: 87-100%)
Akhir dari fase swing dimulai dari tibia vertikal dan diakhiri saat kaki
memijakkan lantai. Kedudukan tungkai yang baik adalah dengan posisi ekstensi
knee dan hip mempertahankan fleksi sedangkan ankle bergerak dari dorsifleksi ke
netral. Anggota gerak bawah yang lain berada pasa fase terminal stance.
37
2.8 Gait Pada Cerebral Palsy
Pada gangguan pola jalan terdapat ciri khas yaitu pola jalan menggunting
(scissor gait) dengan fleksi hip dan knee, endorotasi dan adduksi hip, plantar
fleksi dan inversi kaki. Untuk menjaga posture pada hip fleksi kompensasi akan
terjadi berupa lordosis lumbal (Willoughby, 2010).
Penggunaan reaksi tegak dan keseimbangan pada pelvic akan berlebihan.
Terjadi reaksi kompensasi mulai dari kepala, trunk atas, lengan, dan kaki serta hip
kaku sewaktu melangkah. Problem keseimbangan dan kesulitan rotasi trunk serta
pelvic menyebabkan terganggunya aktifitas berjalan (Willoughby, 2010) .
Ada 2 prinsip pola jalan pada anak Cerebral Palsy Spastik Diplegi yaitu :
1. Anak dengan fleksi kuat pada punggung dan pelvic terangkat ke depan
serta bersandar pada trunk untuk mengangkat salah satu kaki untuk
melangkah ke depan untuk memindahkan berat badan.
2. Punggung tertarik ke belakang dengan lordosis lumbal akibat terjadi
spastisitas seputar fleksor hip khususnya iliopsoas sehingga akan terjadi
side fleksi pada trunk apabila mengayunkan kaki ke depan dan terjadi
mobilitas yang berlebihan pada trunk dan timbul kekakuan pada kedua
tungkainya.
2.9 Diskripsi Hidroterapi
Hidroterapi berasal dari kata Yunani yaitu “ Hunder “ berarti air dan “
therapia “ berarti pengobatan. Hidroterapi adalah salah satu modalitas fisioterapi
dengan menggunakan zat cair sebagai media pengobatan (Kesiktas, 2004).
38
Latihan hidroterapi merupakan program terapi di dalam air, dimana sifat-
sifat air memanfaatkan untuk mencapai tujuan terapeutik (sifat yang
menyembuhkan). Tujuan hidroterapi untuk meningkatkan kemampuan anak,
memperbaiki postural kontrol , melatih keseimbangan, mengontrol gerakan-
gerakan yang involunter dan mengurangi spastisitas (McManus, 2007).
1. Fisika Dasar Air
Air terdiri dari unsur hidrogen dan oksigen. Pada temperatur dan tekanan
yang normal, air tidak berwarna, tidak berasa/tawar dan tidak berbau. Air
membeku pada 0º C dan menguap/mendidih pada 100º C (212º F). Benda dalam
zat cair/air mendapatkan tekanan hidrostatis dari segala jurusan, besarnya
sebanding dengan jarak benda terhadap permukaan zat cair. Ada beberapa hukum
hidrostatistis :
Semua titik pada benda yang berada dalam bejana berisi zat cair, tanpa
memandang bentuk bejananya, akan mendapatkan tekanan hidrostatis yang sama
besar (Hukum utama hidrostatis). Karena efek tekanan hidrostatik memungkinkan
memfasilitasi secara distal, membuat pasien dapat bergerak aktif secara proksimal.
Tekanan hidrostatik menghasilkan tenaga yang tegak lurus dengan permukaan
tubuh pasien, tekanan ini membuat sendi tubuh menyadari di posisi mana ia
berada (body awareness), sehingga hasilnya terjadi peningkatan propioseptif/ rasa
gerak. Rasa gerak ini akan memudahkan pengaturan kontrol postural.
Tekanan yang dikenakan pada permukaan zat cair akan diteruskan ke segala
arah dengan sama rata (Hukum Pascal). Tekanan yang sama rata di seluruh
permukaan kulit memberi rasa nyaman pada input sensoris taktil. Taktil akan
39
memproses informasi tentang sentuhan terutama yang diterima oleh kulit dari
ujung kepala sampai ujung kaki tentang tekstur, bentuk dan ukuran suatu benda.
Input sensoris ini memberi informasi ke otak tentang apa yang menyentuh dan apa
yang kita sentuh, serta membantu kita menemukan sesuatu sentuhan tersebut
membahayakan kita atau tidak. Informasi taktil di air kolam memberikan
informasi ke otak bahwa minimnya resiko melukai diri sendiri karena di air tidak
mungkin jatuh di permukaan yang keras, sehingga pasien lebih percaya diri dan
bebas untuk bergerak, gerakan yang dihasilkan jadi lebih mudah.
Benda-benda (seluruh/sebagian) yang dimasukkan ke dalam zat cair,
mendapatkan gaya ke atas yang besarnya sama dengan berat zat cair didesaknya
(Hukum Archimedes). Hukum ini akan mempengaruhi penilaian apakah bentuk
tubuh pasien sesuai atau tidak dengan densitasnya (berat jenis). Pasien yang
pernah mengalami operasi yang memasukan metal ke dalam tulang atau tubuhnya,
biasanya akan menambah tingkat densitas. Densitas manusia yang normal adalah
0,974. Bila densitasnya lebih dari 1, manusia akan tenggelam.
Kecenderungan untuk membawa ke permukaan benda-benda yang
dimasukkan ke dalam air/zat cair disebabkan oleh karena tekanan ke atas dari
air.zat cair ke semua bagian benda tersebut (Hukum Bouyancy). Daya apung
dapat memberikan relaksasi karena ketinggian air dapat mengurangi berat badan.
Dengan gaya gravitasi tubuh akan tertarik ke bawah, sedangkan di dalam air,
akibat adanya daya apung tubuh akan terdorong ke atas. Jika kedalaman air
setinggi leher, maka berat badannya 10 % dari berat badan sesungguhnya bila
berada di darat. Jika setinggi ulu hati, berat badan yang disangga kira-kira 25 %,
40
bila sebatas pusar atau setinggi pinggang, berat badan yang disangga kira-kira 50
% dari berat badan sebenarnya. Semakin dalam air maka berat tubuh semakin
ringan dan mampu mengurangi spastisitas pula.
Tahap awal, biasanya anak CP akan dimasukkan ke dalam air yang paling
tinggi kedalamannya agar spastisitasnya berkurang, bila spastisitasnya sudah
turun dan anak mampu mengatur keseimbangannya, maka bisa dilanjutkan ke
tempat yang lebih dangkal.
Apabila sebuah benda dimasukkan ke dalam air akan terdapat beberapa
gaya seperti; (a) gaya gravitasi, gaya yang cenderung menarik benda vertikal ke
bawah, besarnya tekanan tergantung dari massa benda dan berat benda, (b)
Bouyancy/gaya ke atas/gaya apung, disebabkan oleh adanya gaya apung dan
cenderung memindahkan benda vertikal ke atas. Kebalikan dengan arah gaya
gravitasi (sesuai dengan hukum Archimedes).
Sifat kental yang dihasilkan air merupakan sumber tahanan yang terbaik
yang dapat memudahkan latihan di dalam air (sifat viscosity). Tahanan tersebut
dipakai untuk melatih penguatan otot-otot tanpa menggunakan beban. Adanya
double tahanan di dalam air memungkinkan terapis bisa memberikan sejumlah
poin perbaikan yang sulit dilakukan di darat atau di matras. Di dalam air, pasien
dapat mengembangkan stabilitas tanpa adanya bantuan dari luar, karena
pergerakan di dalam air sangat lamban, pasien cukup waktu untuk
mengembangkan kemampuan pengendalian stabilitas mereka tanpa banyak
bantuan intervensi terapis. Pembelajaran beberapa aktifitas dapat lebih mudah
41
dilakukan di dalam air dari pada di darat (seperti berdiri tegak, belajar meniup dan
laithan napas).
Pembiasan cahaya terjadi kalau cahaya merambat melalui zat antara
(medium) yang tidak sama kerapatannya (hukum refraksi). Pengaruh hukum ini
terhadap pelaksanaan hidroterapi secara visual, pasien merasa nyaman karena
dasar kolam yang airnya jernih menjadi tampak lebih dangkal dari pada
sesungguhnya. Demikian tubuh pasien merasa lebih pendek dari sebenarnya yang
secara hukum lever memudahkan kerja sistem musculoskeletal tubuh pasien
karena pengaruh gaya gravitasinya lebih kecil
2. Efek terapeutik dan fisiologis
a. Terhadap kulit
Efek yang pertama kali pada kulit adalah vasokonstriksi pembuluh darah
superficial, diikuti timbulnya warna kemerah-merahan (eritema) karena adanya
vasodilatasi (hiperemi). Bila dingin diberikan pada waktu yang lama, kulit akan
berwarna kebiru-biruan (sianosis) karena vasokonstriksi. Ujung saraf (nerve
ending) akan paralysis dan sensitifitas serabut syaraf sensoris akan berkurang.
b. Terhadap jantung dan pembuluh darah
Terjadi vasokonstriksi pembuluh darah kulit, segera diikuti vasokonstriksi
pembuluh darah perifer lainnya, menyebabkan penyempitan pembuluh darah
secara menyeluruh, kemudian akan diikuti oleh peningkatan tekanan darah dan
denyut nadi menjadi cepat. Setelah reaksi menghilang, pembuluh darah perifer
segera akan dilatasi kembali, tekanan darah menurun dan denyut nadi menjadi
lambat.
42
c. Terhadap respirasi
Pernafasan menjadi cepat dan dangkal, kemudian segera diikuti napas yang
dalam dan lambat sehingga meningkatkan pertukaran gas O2 dan CO2 di alveolus
paru.
d. Terhadap jaringan otot
Bila diberikan hanya sebentar, akan memberikan perbaikan pada sirkulasi
darah, sehingga kegiatan otot dan tonus otot bertambah. Bila waktunya
diperpanjang, maka tonus otot akan berkurang, terlihat timbulnya kekakuan pada
anggota tubuh dan akan menggigil sebagai usaha untuk menghasilkan panas.
e. Terhadap sirkulasi darah
Terjadi vasokonstriksi pembuluh darah kulit, sehingga memompa atau
mendorong darah ke jaringan lebih dalam. Disusul dengan adanya vasodilatasi
pembuluh darah superficial sehingga peredaran darah menjadi lancar.
f. Terhadap sistem saraf
Dingin menyebabkan paralis saraf pada kulit. Bila diberikan pada waktu
yang cukup lama akan menyebabkan penurunan fungsi saraf. Tapi bila diberikan
pada dosis yang cukup memperbaiki sistem saraf simpatik pada tubuh,
memperbaiki hormonal dan metabolisme yang dibutuhkan untuk memperkuat
daya tahan tubuh. Bila daya tahan tubuh semakin kuat, secara psikologis anak
akan senang melakukan kegiatan terapi di dalam air (hidroterapi). Rasa senang
atau relaksasi tersebut membantu anak meningkatkan atensi dan partisipasi aktif
selama kegiatan terapi berlangsung dan hasilnya lebih efektis (Yenita, 2011).
43
Seluruh sistem sensoris harus dapat berfungsi dengan tepat dan berintergrasi
satu sama lain untuk dapat menginterpretasikan seluruh stimulus yang terdapat di
sekitarnya secara akurat dan memberi respon terhadap stimulus tersebut dengan
akurat juga, (Noh, 2008).
3. Mekanisme hidoterapi pada cerebral palsy
Permasalahan pada cerebral palsy adanya abnormalitas tonus (spastisitas)
sehingga mengalami kesulitan mengontrol gerakan dan ketidakmampuan
melakukan aktifitas fungsional secara independen (Hutzler, 2008).
Latihan hidroterapi menguntungkan pergerakan motorik karena melibatkan
multi stimulasi input sensoris. Hal ini terjadi melalui serangkaian proses yang
terorganisasi melalui sistem saraf pusat. Sistem ini menerima input sensori dari
reseptor-reseptor ekteroseptif (yaitu reseptor penglihatan, pendengaran,
pengecapan, bau dan suhu), dari propioseptif (reseptor yang terdapat pada otot,
tendon, ligamen, sendi dan selaput otot), serta dari sistem vestibular (informasi
diterima melalui telinga bagian dalam mengenai keseimbangan, pergerakan dan
gravitasi) (Real, 2005).
Latihan hidroterapi dapat mengurangi spastisitas dengan mekanisme reflek
inhibiting posture. Temperature air berpengaruh terhadap spastisitas dan efek
rileksasi. Latihan hidroterapi memanfaatkan tekanan hidrostatik meningkatkan
posisi kesadaran sendi atau propioseptif. Tekanan hidrostatik menghasilkan
tekanan yang tegak lurus dengan permukaan tubuh pasien. Tekanan ini membuat
sendi lebih menyadari di posisi mana dia berada, sehingga hasilnya terjadi
peningkatan propioseptif (rasa gerak sendi) (Broach, 2007).
44
Daya apung pada hidroterapi berfungsi mengurangi jumlah berat badan
dengan cara menurunkan kekuatan yang dihasilkan oleh tekanan pada sendi.
Viscosity atau sifat kental yang dihasilkan air merupakan sumber tahanan terbaik
yang dapat memudahkan program latihan.Tahanan tersebut digunakan untuk
penguatan otot tanpa membutuhkan beban. Menggunakan double tahanan yang
dimiliki air (buoyancy dan viscosity) untuk menguatkan grup otot yang apabila
dilaksanakan diluar air tidak bisa atau bahkan tidak mungkin tetapi ketika
dilaksanakan di air penguatan grup otot ini dapat dilaksanakan (Broach, 1997).
4. Teknik Hidroterapi
Intervensi fisioterapi yang dapat digunakan untuk menangani anak dengan
kondisi cerebral palsy spastic diplegia adalah Hidroterapi dengan metode
Halliwick dan Bad Ragaz.
a. Metode Halliwick
Dikembangkan oleh James McMillan pada tahun 1950, yang dimulai di
Halliwick School for Crippled Girls di London dengan menerapkan 10 Point
Program. Dasar filosofi Halliwick adalah untuk mencapai kemandirian yang
maksimal di air dan darat melalui kepercayaan diri yang baik. Terdapat 10
tahapan teknik dalam metode Halliwick, yang kesemuanya mencakup adaptasi
mental (mental adaptation/adjustment), kontrol keseimbangan (balance control)
dan gerakan (movement).
45
b. Mental Adjustment
Bertujuan untuk menghilangkan rasa takut terhadap air serta untuk melatih
pernafasan dalam air meliputi menahan nafas dalam air dan mengontrol hembusan
nafas agar tidak menghirup atau menelan air.
c. Disengagement
Merupakan instruksi gerakan menjadi bebas secara fisik dan mental di
dalam air selama proses,berdiri, berjalan, melompat dan berhenti.
d. Transversal Rotation Control
Latihan aktivitas yang disusun untuk membantu anak mengontrol dan
menyusun semua gerakan rotasi yang ada pada aksis fronto transversal.
e. Sagittal Rotation Control
Prinsip dasar latihan adalah melatih kemampuan anak untuk menata dan
mengontrol gerakan berputar yang berpusat pada axis sagitto transversal.
f. Longitudinal Rotation Control
Prinisip dasar latihan adalah melatih kemampuan anak untuk menata dan
mengontrol gerakan berputar yang berpusat pada axis sagitto frontal.
g. Combined Rotation
Merupakan kemampuan untuk mengontrol semua kombinasi rotasi.
h. Up Trust
Latihan dengan prinsip mengapung dan tenggelam didalam air. Dan untuk
mengontrol tubuh didalam air.
46
i. Balance in stillness
Kemampuan untuk memelihara atau mengganti posisi di dalam air dengan
mandiri.
j. Turbulent gliding
Rileksasi yang dilakukan didalam air dengan posisi mengapung terlentang
dengan support terapis dengan arah gerak berputar (turbulence).
k. Simple Progression and Basic Progression
Latihan berpindah tempat secara mandiri dengan mengapung di dalam air,
tergantung pada kemampuan individu.
b. Metode Bad Ragaz
Bad Ragaz dikembangkan di Jerman, tetapi asal mula bad Ragaz dari
Switzerland. Tujuan utama metode ini adalah: memperbaiki dan memelihara
fungsi, perbaikan control kepala dan trunk, muscle balance, equilibrium serta
menambah range of motion.
2.10 Diskripsi Terapi Bobath
Dengan perkembangan zaman, ilmu, dan teknologi yang terus
menerus,maka terapi latihan dengan metode Bobath mengalami perkembangan.
a. Konsep Awal (Original Concept)
Metode Bobath pada awalnya memiliki konsep perlakuan yang didasarkan
atasinhibisi aktivitas abnormal refleks (Inhibition of abnormal refleks activity) dan
pembelajaran kembali gerak normal (The relearning of normal movement),
melalui penanganan manual dan fasilitasi.
47
b. Konsep Bobath Terkini
Dalam kurun waktu dekade terakhir ini memaparkan para terapis dengan
peningkatan evidance di bidang neuroscience, biomechanics dan motor learning
(Royal College of Physicians, 2004). Perkembangan ini memperdalam
pemahaman tentang human movement dan efek dari patologi, membantu untuk
membimbing para terapis dalam melakukan intervensi klinis mereka untuk
memaksimalkan fungsional outcome pasien. Terdapat evidance yang kuat efek
dari rehabilitasi dalam hal peningkatan kemandirian fungsional dan mengurangi
kematian (Royal College of Physicians, 2004).
Konsep Bobath terkini adalah suatu problem solving approach untuk
melakukan suatu assessment dan treatment kepada individu dengan gangguan
fungsi, gerak dan postural control karena adanya suatu lesi pada Sistem Saraf
Pusat (SSP) dan dapat diterapkan pada individu-individu dari segala usia dan
semua derajat cacat fisik dan fungsional (Raine, 2006; IBITA, 2007)
Gambar 2.5. Motor Control (Sumber:Raine, 2007)
INDIVIDUAL
ENVIRONMENT
TASK
48
Systems approach teori motor control adalah dasar yang mendasari prinsip-
prinsip dari assesment dan treatment yang terdapat dalam konsep Bobath terkini
(Raine, 2007). Konsep ini menganggap motor control adalah dasar dari
bekerjanya sistem saraf baik secara hierarchical dan distribusi paralel, multilevel
processing diantara banyak sistem dan subsistem melibatkan beberapa input, dan
dengan modulasi pada level tertentu dalam suatu proses. Sehingga memungkinkan
terjadinya potensi plastisitas sebagai dasar pembangunan, belajar dan pemulihan
dalam sistem saraf dan sistem otot.
Plastisitas merupakan istilah umum yang digunakan untuk menggambarkan
kemampuan untuk melakukan suatu perubahan. Kemampuan otak untuk
memodifikasi dan mereorganisasi fungsi dan fungsi yang mengalami cidera atau
kerusakan disebut neuroplastisitas. Neuroplastisitas merupakan suatu perubahan
yang terjadi pada lokasi pengorganisasian sistem saraf terutama perubahan yang
terjadi pada lokasi tempat fungsi processing informasi sebagai akibat
pembelajaran dan pengalaman (Shumway-Cook & Woollacott, 2007).
Neuroplastisitas ini sendiri adalah merupakan perubahan dalam prilaku,
indera dan pengalaman kognitif. Dalam penelitian neuroscience, terdapat 2
kategori penting dalam pendekatan untuk memperbaiki fungsi otak setelah
mengalami cidera, yaitu :
1. Usaha untuk membatasi tingkat keparahan cidera awal untuk
meminimalkan hilangnya fungsi
2. Usaha untuk pengorganisasian kembali otak untuk mengembalikan
fungsi yang telah hilang
49
Pendekatan yang pertama merupakan hal yang sangat penting, karena
perawatan pada saat awal cidera akan berpengaruh terhadap tingkat keparahan
kecacatan jangka panjang. Ini merupakan suatu hal yang harus dipahami
bagaimana struktur otak dan fungsi dapat berubah dari hari-kehari, bulan dan
tahun setelah adanya kerusakan otak (Kisner & Colby, 2002).
Perubahan plastisitas berdasarkan atau berlandaskan dari pembelajaran,
memori, dan pemulihan dari saraf yang rusak pada dan dibawah dari tingkat
kerusakan (White, 2008). Pembelajaran mengorganisasi ulang otak yang cidera
walaupun tanpa adanya rehabilitasi. Konsekuensi behaviour kerusakan otak yang
kehilangan fungsi adalah perkembangan pengganti strategi behaviour setiap
individu dalam melakukan aktivitas sehari-hari. Otak yang cidera merubah cara
otak dalam merespon pembelajaran. Pembelajaran ini meliputi perubahan dalam
gen, sinaps dan jaringan saraf sesuai dengan daerah otaknya (Schretzman, 2001).
Tujuan intervesi dengan metode Bobath adalah optimalisasi fungsi dengan
peningkatan control postural dan gerakan selektif melalui fasilitasi, sebagaimana
yang dinyatakan oleh International Bobath Instructor Training Association
(IBITA,1998).
Tujuan yang akan dicapai dengan metode Bobath :
1. Melakukan identifikasi pada area-area spesifik otot-otot antigravitasi
yang mengalami penurunan tonus
2. Meningkatkan kemampuan input proprioseptif
3. Melakukan identifikasi tentang gangguan fungsi setiap individu dan
mampu melakukan aktivitas fungsi yang efisien “Normal”
50
4. Fasilitasi specific motor activity
5. Minimalisasi gerakan kompensasi sebagai reaksi dari gangguan gerak
6. Mengidentifikasi kapan dan bagaimana gerakan menjadi lebih efektif
(Irfan, 2010).
Analisa tentang gerak normal (normal movement) menjadi dasar utama
penerapan aplikasi metode ini. Dengan pemahaman gerak normal, maka setiap
fisioterapis akan mampu melakukan identifikasi problematik gerak akibat
gangguan sistem saraf pusat (Schretzman,2001).
Akibat adanya gangguan sistem saraf pusat (SSP) akan mengakibatkan
abnormal tonus postural, dari abnormal tonus postural tersebut kemudian
berdampak terhadap menurunnya kualitas gerak yang mengakibatkan terjadinya
abnormalitas pada umpan balik sensoris. Pada tahap ini aktivitas dilakukan
dengan kerja yang lebih berat. Akibat adanya abnormalitas pada umpan balik
sensoris maka akan berakibat menurunnya kualitas gerak dan pada akhirnya
memunculkan kembali abnormalitas tonus postural. Pada tahap ini akan terjadi
kompensasi gerak.
Adanya abnormalitas gerak memberikan dampak terhadap komponen-
komponen gerak lainnya yang saling berhubungan satu sama lain. Untuk itu,
diperlukan metode yang dapat menghentikan abnormalitas gerak akibat lesi pada
CNS.
Metode Bobath adalah salah satu metode yang berorientasi pada aktivitas
pola gerak normal dengan meningkatkan kemampuan control postural dan
gerakan-gerakan selektif.
51
2.1.1 Indikasi dan Kontra indikasi Metode Bobath
a. Indikasi Metode Bobath
1) Adanya cidera atau injury Sistem Saraf Pusat
2) Adanya gangguan proprioseptif
3) Adanya masalah motor control
4) Adanya masalah human motor behaviour
b. Kontra Indikasi Metode Bobath
1) Treatment dihentikan apabila nadi melebihi HRmax
2) Adanya pucat
3) Adanya sesak nafas