BAB II TINJAUAN PUSTAKA - sinta.unud.ac.id II.pdf · disebabkan oleh peluang dan situasi yang ......
28
6 BAB II TINJAUAN PUSTAKA Berikut teori-teori yang mendukung penelitian ini, yaitu konsep dasar peramalan, konsep dasar deret waktu, proses stokastik, proses stasioner, fungsi autokovarians (ACVF) dan fungsi autokorelasi (ACF), fungsi autokorelasi parsial (PACF), proses white noise, differencing, operator backshift, transformasi Box- Cox, model stasioner deret waktu (AR, MA, dan ARMA), model non-stasioner deret waktu (ARIMA), pemrograman linear, dan goal programming. 2.1 Konsep Dasar Peramalan Peramalan (forecasting) adalah suatu seni dan ilmu untuk memperkirakan kejadian pada masa depan. Peramalan dilakukan dengan melibatkan pengambilan data masa lalu dan menempatkannya ke masa yang akan datang dengan suatu bentuk model matematis (Heizer dan Render, 2006). Pada dasarnya terdapat dua metode peramalan (Hakim, 2004), yaitu: 1. Metode Peramalan Kualitatif Metode peramalan kualitatif digunakan ketika data historis tidak tersedia, dengan kata lain peramalan kualitatif merupakan peramalan yang tidak berbentuk angka. Metode peramalan kualitatif disebut juga dengan metode subjektif. Misalnya jika rumah sakit ingin mengetahui kualitas pelayanan yang diberikan maka rumah sakit tersebut perlu membuat suatu kuesioner pertanyaan tentang pelayanan yang diberikan oleh rumah sakit tersebut kepada pasien.
Transcript of BAB II TINJAUAN PUSTAKA - sinta.unud.ac.id II.pdf · disebabkan oleh peluang dan situasi yang ......
6
BAB II
TINJAUAN PUSTAKA
Berikut teori-teori yang mendukung penelitian ini, yaitu konsep dasar
peramalan, konsep dasar deret waktu, proses stokastik, proses stasioner, fungsi
autokovarians (ACVF) dan fungsi autokorelasi (ACF), fungsi autokorelasi parsial
(PACF), proses white noise, differencing, operator backshift, transformasi Box-
Cox, model stasioner deret waktu (AR, MA, dan ARMA), model non-stasioner
deret waktu (ARIMA), pemrograman linear, dan goal programming.
2.1 Konsep Dasar Peramalan
Peramalan (forecasting) adalah suatu seni dan ilmu untuk memperkirakan
kejadian pada masa depan. Peramalan dilakukan dengan melibatkan pengambilan
data masa lalu dan menempatkannya ke masa yang akan datang dengan suatu
bentuk model matematis (Heizer dan Render, 2006). Pada dasarnya terdapat dua
metode peramalan (Hakim, 2004), yaitu:
1. Metode Peramalan Kualitatif
Metode peramalan kualitatif digunakan ketika data historis tidak tersedia,
dengan kata lain peramalan kualitatif merupakan peramalan yang tidak
berbentuk angka. Metode peramalan kualitatif disebut juga dengan
metode subjektif. Misalnya jika rumah sakit ingin mengetahui kualitas
pelayanan yang diberikan maka rumah sakit tersebut perlu membuat
suatu kuesioner pertanyaan tentang pelayanan yang diberikan oleh rumah
sakit tersebut kepada pasien.
7
2. Metode Peramalan Kuantitatif
Metode peramalan kuantitatif menggunakan data historis atau data masa
lampau. Tujuannya adalah mempelajari kejadian pada masa lalu,
sehingga bisa memahami struktur dan sifat-sifat yang penting dari data.
Metode peramalan kuantitatif dapat dibagi menjadi dua tipe yaitu:
a. Metode peramalan kausal meliputi penentuan faktor-faktor yang
berhubungan dengan variabel yang diprediksi. Contoh tipe
peramalan ini adalah peramalan analisis regresi berganda
dengan variabel lag ataupun model ekonometrika.
b. Metode peramalan deret waktu meliputi proyeksi dari nilai-nilai
yang akan datang dari variabel yang sepenuhnya didasarkan
pada observasi masa lalu dan masa kini variabel tersebut.
2.2 Konsep Dasar Deret Waktu
Data deret waktu adalah data yang disusun berdasarkan urutan terjadinya
waktu. Data tersebut menggambarkan perkembangan suatu kejadian atau suatu
kegiatan. Analisis deret waktu adalah suatu metode kuantitatif yang mempelajari
pola gerakan data masa lampau yang teratur (Wirawan, 2001).
Deret waktu mempunyai empat komponen (Heizer dan Render, 2006), yaitu:
1. Komponen Tren
Komponen tren merupakan pergerakan data sedikit demi sedikit
meningkat atau menurun, seperti perubahan pendapatan dan penyebaran
umur.
8
2. Komponen Musiman
Komponen musiman adalah pola data yang berulang pada kurun waktu
tertentu, seperti harian, mingguan, bulanan, atau kuartalan.
3. Komponen Siklis
Komponen siklis adalah pola dalam data yang terjadi setiap beberapa
tahun. Contoh komponen siklis ini biasanya terkait pada siklus bisnis dan
merupakan satu hal penting dalam analisis serta perencanaan bisnis
jangka pendek.
4. Komponen Variasi Acak (Random Variation)
Komponen variasi acak merupakan satu titik khusus dalam data, yang
disebabkan oleh peluang dan situasi yang tidak biasa. Variasi acak tidak
mempunyai pola khusus, jadi tidak dapat diprediksi.
9
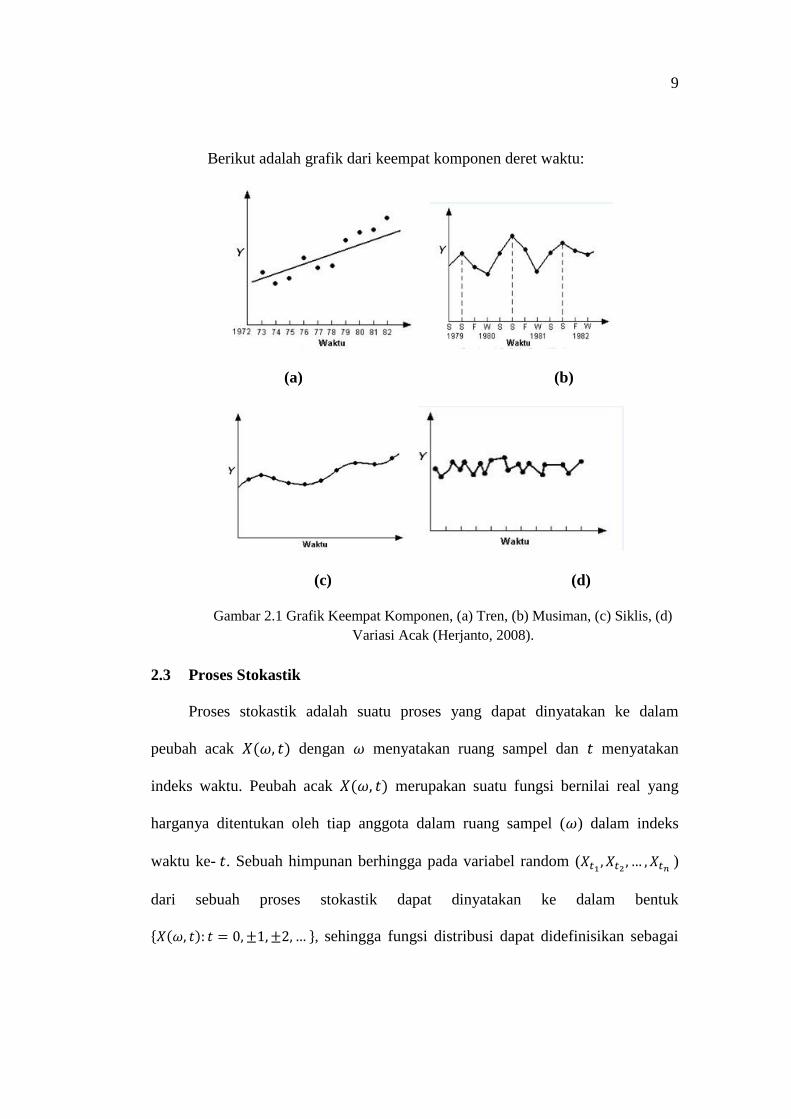
Berikut adalah grafik dari keempat komponen deret waktu:
(a) (b)
(c) (d)
Gambar 2.1 Grafik Keempat Komponen, (a) Tren, (b) Musiman, (c) Siklis, (d)
Variasi Acak (Herjanto, 2008).
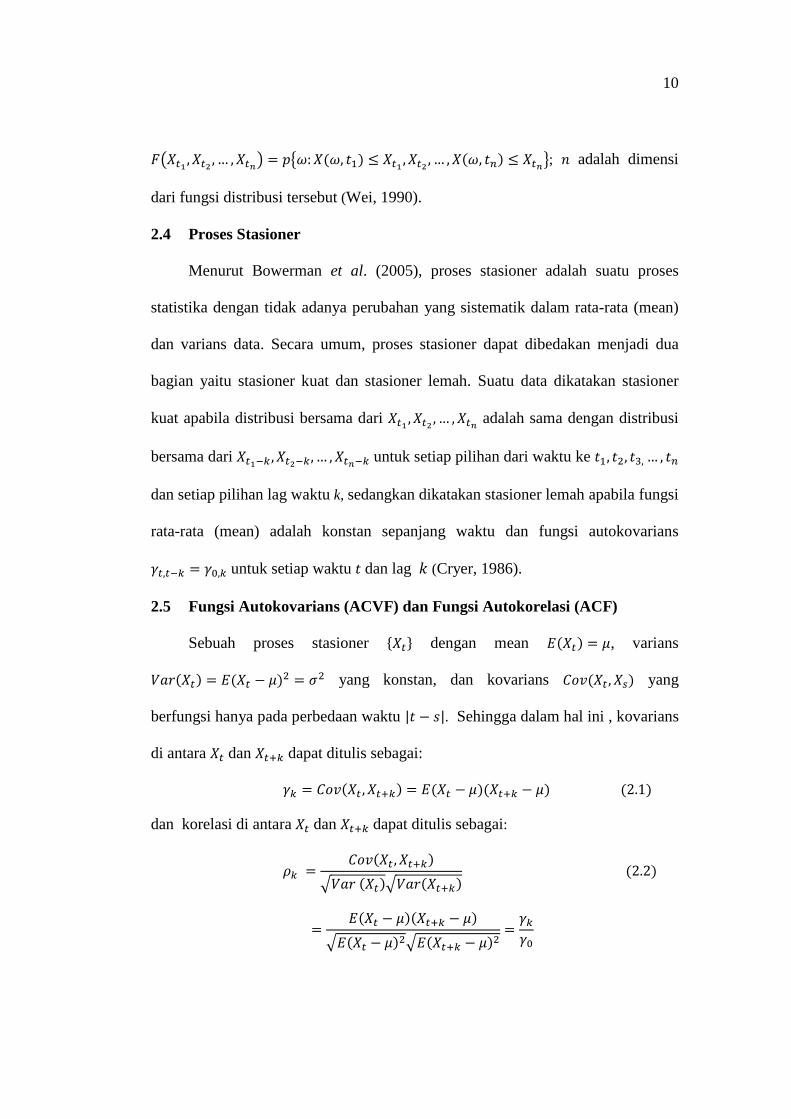
2.3 Proses Stokastik
Proses stokastik adalah suatu proses yang dapat dinyatakan ke dalam
peubah acak dengan menyatakan ruang sampel dan menyatakan
indeks waktu. Peubah acak merupakan suatu fungsi bernilai real yang
harganya ditentukan oleh tiap anggota dalam ruang sampel ( ) dalam indeks
waktu ke- . Sebuah himpunan berhingga pada variabel random ( )
dari sebuah proses stokastik dapat dinyatakan ke dalam bentuk
{ }, sehingga fungsi distribusi dapat didefinisikan sebagai
10
( ) { }; adalah dimensi
dari fungsi distribusi tersebut (Wei, 1990).
2.4 Proses Stasioner
Menurut Bowerman et al. (2005), proses stasioner adalah suatu proses
statistika dengan tidak adanya perubahan yang sistematik dalam rata-rata (mean)
dan varians data. Secara umum, proses stasioner dapat dibedakan menjadi dua
bagian yaitu stasioner kuat dan stasioner lemah. Suatu data dikatakan stasioner
kuat apabila distribusi bersama dari adalah sama dengan distribusi
bersama dari untuk setiap pilihan dari waktu ke
dan setiap pilihan lag waktu k, sedangkan dikatakan stasioner lemah apabila fungsi
rata-rata (mean) adalah konstan sepanjang waktu dan fungsi autokovarians
untuk setiap waktu dan lag (Cryer, 1986).
2.5 Fungsi Autokovarians (ACVF) dan Fungsi Autokorelasi (ACF)
Sebuah proses stasioner { } dengan mean , varians
yang konstan, dan kovarians yang
berfungsi hanya pada perbedaan waktu | |. Sehingga dalam hal ini , kovarians
di antara dan dapat ditulis sebagai:
dan korelasi di antara dan dapat ditulis sebagai:
√ √
√ √

11
dengan ; adalah rata-rata (mean); menyatakan
fungsi autokovarians pada lag untuk 1, 2, 3, ...; menyatakan fungsi
autokorelasi pada lag ; adalah waktu pengamatan ( 1, 2, 3, ...), adalah
pengamatan pada waktu ke-t (Wei, 1990).
Pada keadaan stasioner fungsi autokovarians pada lag dan fungsi
autokorelasi pada lag harus memenuhi (Wei, 1990):
1. untuk 1, 2, 3, ...
2. | |
|
| untuk 1, 2, 3, ...
3. dan untuk semua .
2.6 Fungsi Autokorelasi Parsial (PACF)
Autokorelasi parsial di antara dan dapat diturunkan dari model regresi
linear, dengan variabel dependent dan variabel independen
, yaitu :
dengan adalah parameter regresi pada lag untuk 1, 2, 3, ..., dan
adalah kesalahan normal berkorelasi dengan untuk . Dengan
mengalikan pada kedua ruas persamaan dan menghitung nilai
harapannya, diperoleh:
( ) ( ) ( )
( ) ( )
dengan menggunakan algoritma Yule-Walker sehingga diperoleh persamaan
sebagai berikut (Cryer and Chan, 2010):
12
untuk 1, 2, 3, ..., , diperoleh sistem persamaan berikut:
.
.
karena merupakan fungsi pada lag , maka disebut fungsi autokorelasi
parsial pada sebagai berikut:
∑
∑
dengan untuk 1, 2, 3, ..., .
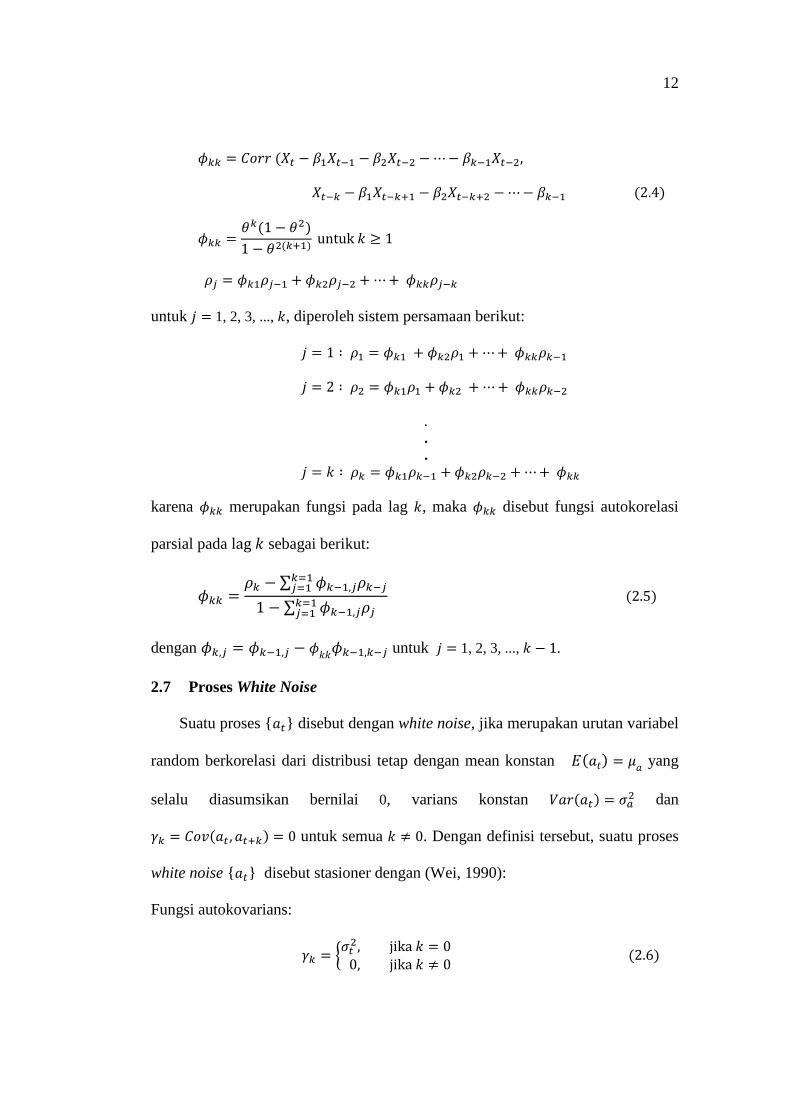
2.7 Proses White Noise
Suatu proses { } disebut dengan white noise, jika merupakan urutan variabel
random berkorelasi dari distribusi tetap dengan mean konstan yang
selalu diasumsikan bernilai 0, varians konstan dan
untuk semua . Dengan definisi tersebut, suatu proses
white noise { } disebut stasioner dengan (Wei, 1990):
Fungsi autokovarians:
{
13
Fungsi autokorelasi:
{
Fungsi autokorelasi parsial:
{
2.8 Differencing
Differencing dilakukan untuk menstasionerkan data non-stasioner. Operator
differencing dapat didefinisikan sebagai:
dan dapat dikembangkan ke tingkat yang lebih tinggi. Sebagai contoh:
apabila data belum stasioner, maka dilakukan proses differencing sampai data
menunjukkan kestasionerannya yang dapat dilihat pada plot ACF dan plot PACF
(Reinert, 2010).
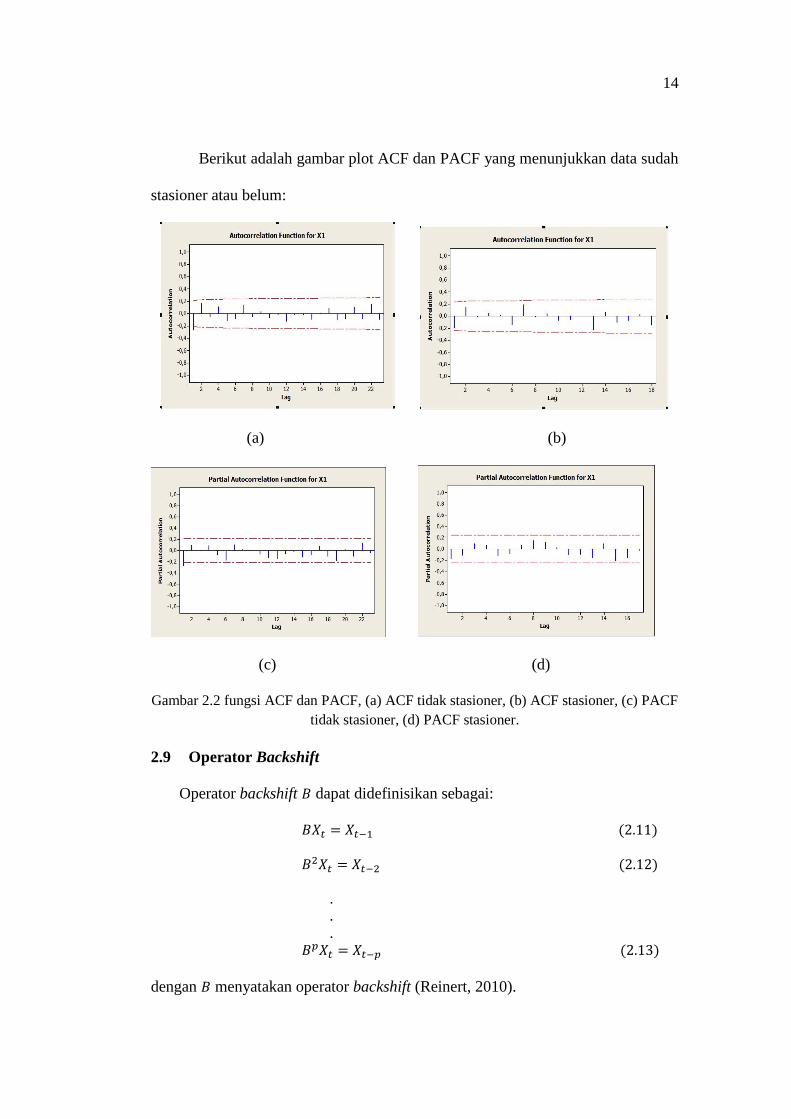
14
Berikut adalah gambar plot ACF dan PACF yang menunjukkan data sudah
stasioner atau belum:
(a) (b)
(c) (d)
Gambar 2.2 fungsi ACF dan PACF, (a) ACF tidak stasioner, (b) ACF stasioner, (c) PACF
tidak stasioner, (d) PACF stasioner.
2.9 Operator Backshift
Operator backshift dapat didefinisikan sebagai:
dengan menyatakan operator backshift (Reinert, 2010).

15
2.10 Transformasi Box-Cox
Transformasi Box-Cox merupakan sebuah transformasi berparameter tunggal
yang ditransformasi menjadi sebuah transformasi berpangkat pada respon .
Secara matematis dapat ditulis sebagai berikut:
{
dengan menyatakan variabel respon ke- untuk dan menyatakan
parameter yang perlu diduga (Sclove, 2005).
Tabel 2.1 beberapa nilai dengan transformasinya
Transformasi
2
0,5 √
1 (tidak ada transformasi)
0
-0,6 √
⁄
-1
⁄
Sumber: (Kutner, et al., 2005)
2.11 Model Stasioner Deret Waktu
Suatu kelas proses stasioner deret waktu adalah proses ARMA
(Autoregressive Moving Average). Proses ARMA ini meliputi proses AR
(Autoregressive) dan proses MA (Moving Average).

16
2.11.1 Proses AR (Autoregressive)
Proses autoregresif dengan order dinotasikan , memenuhi persamaan
(Wei, 1990):
dengan adalah koefisien autoregresif untuk ; adalah indeks
dengan rata-rata nol dan varian ; dan adalah order AR. Persamaan
dapat ditulis menggunakan operator backshift :
(
)
dapat dinyatakan dalam operator backshift ( ) sebagai:
dengan
.
2.11.2 Proses MA (Moving Average)
Model moving average dengan order dinotasikan , adalah (Wei,
1990):
dengan adalah parameter model MA untuk , dan adalah order
MA. Persamaan dapat ditulis menggunakan operator backshift :
(
)
17
dapat dinyatakan dalam operator backshift ( ) sebagai:
dengan
2.11.3 Proses ARMA (Autoregressive Moving Average)
Model autoregressive moving average dengan order dan dinotasikan
, adalah (Wei, 1990):
atau
dengan
dan
dengan adalah koefisien autoregresif unuk ; adalah order AR;
adalah parameter MA ke- untuk ; dan adalah order MA.
2.12 Model Non-Stasioner Deret Waktu ARIMA
Menurut Wei (1990), model rerata bergerak terintergrasi autoregresif dengan
order dan dinotasikan ARIMA , memenuhi persamaan:
dengan
adalah koefisien AR
(Autoregressive) dengan order ,
adalah
koefisiean MA (Moving Average) dengan order , menyatakan proses
differencing dengan order , adalah koefisien AR (Autoregressive) dengan
order , dan adalah koefisien MA (Moving Average) dengan order , dan
menyatakan rata-rata (mean) pada proses ARIMA .
Seperti yang dituliskan dalam buku (Rosadi, 2012), secara umum langkah-
langkah yang dilakukan dalam analisis deret waktu adalah sebagai berikut:
18
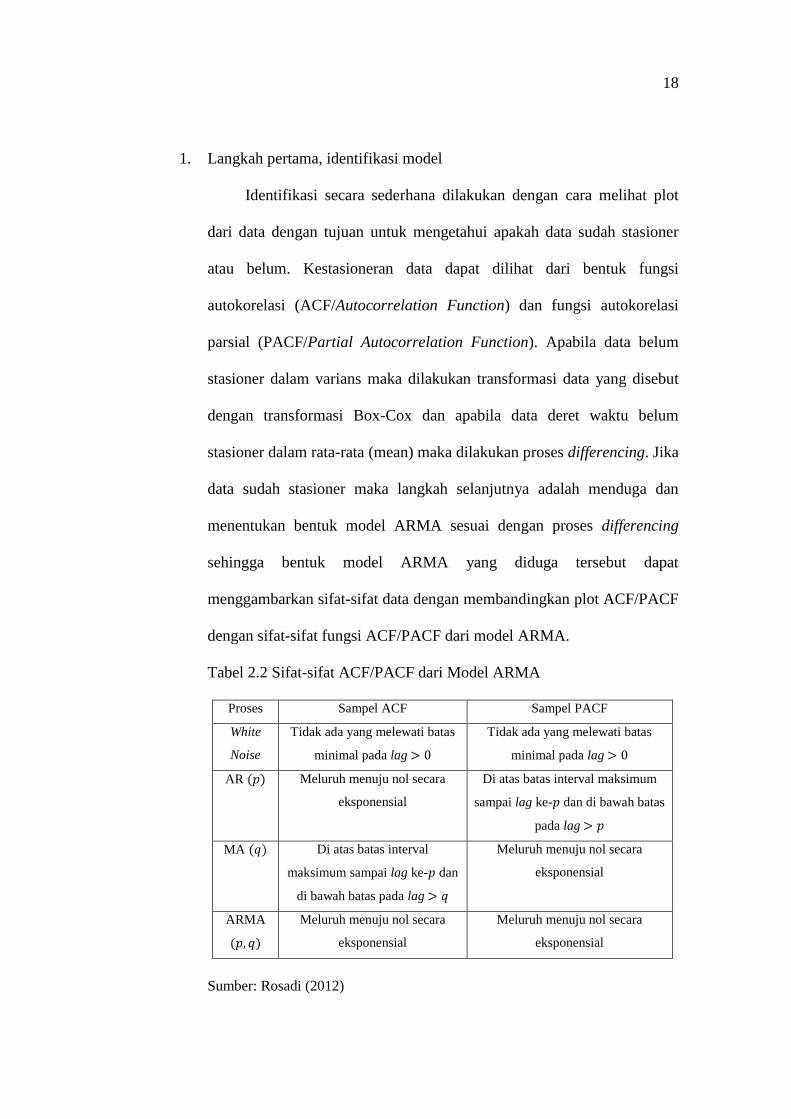
1. Langkah pertama, identifikasi model
Identifikasi secara sederhana dilakukan dengan cara melihat plot
dari data dengan tujuan untuk mengetahui apakah data sudah stasioner
atau belum. Kestasioneran data dapat dilihat dari bentuk fungsi
autokorelasi (ACF/Autocorrelation Function) dan fungsi autokorelasi
parsial (PACF/Partial Autocorrelation Function). Apabila data belum
stasioner dalam varians maka dilakukan transformasi data yang disebut
dengan transformasi Box-Cox dan apabila data deret waktu belum
stasioner dalam rata-rata (mean) maka dilakukan proses differencing. Jika
data sudah stasioner maka langkah selanjutnya adalah menduga dan
menentukan bentuk model ARMA sesuai dengan proses differencing
sehingga bentuk model ARMA yang diduga tersebut dapat
menggambarkan sifat-sifat data dengan membandingkan plot ACF/PACF
dengan sifat-sifat fungsi ACF/PACF dari model ARMA.
Tabel 2.2 Sifat-sifat ACF/PACF dari Model ARMA
Proses Sampel ACF Sampel PACF
White
Noise
Tidak ada yang melewati batas
minimal pada lag
Tidak ada yang melewati batas
minimal pada lag
AR Meluruh menuju nol secara
eksponensial
Di atas batas interval maksimum
sampai lag ke- dan di bawah batas
pada lag
MA Di atas batas interval
maksimum sampai lag ke- dan
di bawah batas pada lag
Meluruh menuju nol secara
eksponensial
ARMA
Meluruh menuju nol secara
eksponensial
Meluruh menuju nol secara
eksponensial
Sumber: Rosadi (2012)
19
2. Langkah kedua, mengestimasi parameter dalam model
Setelah menduga dan menentukan bentuk model ARIMA maka,
langkah selanjutnya adalah mengestimasi parameter dalam model. Untuk
mengetahui apakah koefisien hasil estimasi signifikan atau tidak dapat
digunakan pengujian statistik uji- yang akan berdistribusi student-
dengan derajat bebas , adalah banyaknya sampel.
3. Langkah ketiga, pemeriksaan diagnostik
Langkah selanjutnya adalah melakukan pemeriksaan diagnostik dari
model yang telah diestimasi. Untuk mengetahui apakah residual yang
dihitung berdasarkan model yang telah diestimasi mengikuti asumsi error
dari model sifat white noise atau tidak, maka dilakukan pengujian sisaan
white noise melalui nilai autokorelasinya dengan langkah sebagai
berikut:
i. Hipotesis:
(residual memenuhi white noise)
minimal ada satu (residual tidak memenuhi white noise)
untuk ; dengan menyatakan nilai autokorelasi pada
.
ii. Statistik Uji:
Stastistik uji yang digunakan adalah statistik uji Ljung-Box:
∑ ̂
20
dengan menyatakan statistik uji Ljung-Box, ̂ menyatakan nilai
sampel ACF pada , menyatakan banyaknya sisaan, serta
menyatakan banyaknya parameter dalam model.
iii. Daerah Penolakan: Tolak jika
Setelah uji sisaan white noise dilakukan maka langkah selanjutnya
adalah menguji kenormalan residual yang dapat dilakukan dengan
menggunakan uji kenormalan Anderson –Darling (Wei, 1990):
i. Hipotesis
data mengikuti sebaran normal
data tidak mengikuti sebaran normal
ii. Statistik Uji
(
)∑ [ ( )]
dengan adalah fungsi sebaran kumulatif dari distribusi
normal standar atau normal baku, menyatakan data terurut ke-
untuk 1, 2, 3, ..., .
iii. Daerah Penolakan: Tolak jika P-value dengan .
4. Langkah keempat, memilih model terbaik
Parameter yang dipergunakan dalam peramalan haruslah optimal
untuk mendapatkan suatu model terbaik. Metode yang digunakan untuk
mengetahui kualitas dari model adalah Akaike’s Information Criterion
(AIC). Nilai AIC terkecil dapat mewakili model tersebut merupakan
model terbaik. Persamaan untuk menghitung nilai AIC adalah sebagai
berikut (Wei, 1990) :
21
(
)
dengan adalah banyaknya parameter dalam model, adalah jumlah
kuadrat residual dan adalah banyaknya data residual.
5. Langkah kelima, membuat model peramalan
Setelah mendapatkan model terbaik dari kandidat model yang
diduga maka langkah selanjutnya adalah membuat model peramalan
berdasarkan model ARIMA yang terpilih.
6. Langkah keenam, menentukan peramalan
Setelah model peramalan ditentukan sesuai dengan model ARIMA
yang terpilih, selanjutnya adalah melakukan peramalan dengan
menggunakan bantuan program R.
2.13 Pemrograman Linear
Pemrograman linear adalah suatu teknik perencanaan yang bersifat analitis
yang analisisnya menggunakan model matematis dengan tujuan menemukan
beberapa kombinasi alternatif pemecahan optimum terhadap persoalan
(Aminudin, 2005).
2.13.1 Bentuk Umum Model
Bentuk umum dari model dan tabel simpleks awal pemrograman linear
(Aminudin, 2005) yaitu:
Maks
dengan batasan:
22
dan
dengan menyatakan fungsi tujuan yang dicari nilai optimalnya (maksimal/
minimal), menyatakan kenaikan nilai apabila ada pertambahan tingkat
kegiatan dengan satu satuan unit atau sumbangan setiap satuan keluaran
kegiatan terhadap , menyatakan banyaknya data, menyatakan batasan
sumber atau fasilitas yang tersedia, menyatakan variabel keputusan,
menyatakan koefisien dari variabel keputusan untuk dan
, serta menyatakan besar target ke- .
2.13.2 Langkah-langkah Metode Simpleks
Langkah-langkah yang dipergunakan dalam pemecahan program linear
dengan metode simpleks (Aminudin, 2005), yaitu:
1. Formulasikan dan standarisasikan modelnya.
2. Membentuk tabel awal simpleks berdasarkan informasi model pada
langkah 1.
3. Menentukan kolom kunci di antara kolom-kolom variabel yang ada, yaitu
kolom yang mengandung nilai paling positif untuk kasus
memaksimumkan dan kolom yang mengandung nilai paling
negatif untuk kasus meminimumkan.
4. Menentukan baris kunci di antara baris-baris variabel yang ada, yaitu
baris yang memiliki rasio kuantitas ( ) dengan nilai positif terkecil.
Dalam bentuk matematis dapat ditulis:
23
5. Membentuk tabel berikutnya dengan memasukan variabel pendatang ke
kolom variabel dasar dan mengeluarkan variabel perantau dari kolom
tersebut serta lakukan transformasi baris-baris variabel. Dengan
menggunakan rumus transformasi sebagai berikut:
i. Baris baru selain baris kunci:
ii. Baris kunci baru:
iii. Rasio kunci:
6. Lakukanlah uji optimalitas. Dengan kriteria jika semua koefisien pada baris
sudah tidak ada lagi yang bernilai positif (untuk kasus
memaksimumkan) atau sudah tidak ada lagi bernilai negatif (untuk kasus
meminimumkan) berarti tabel sudah optimal. Jika kriteria tersebut belum
terpenuhi maka diulangi mulai dari langkah ke-3 sampai ke-6, hingga
terpenuhi kriteria tersebut.
24
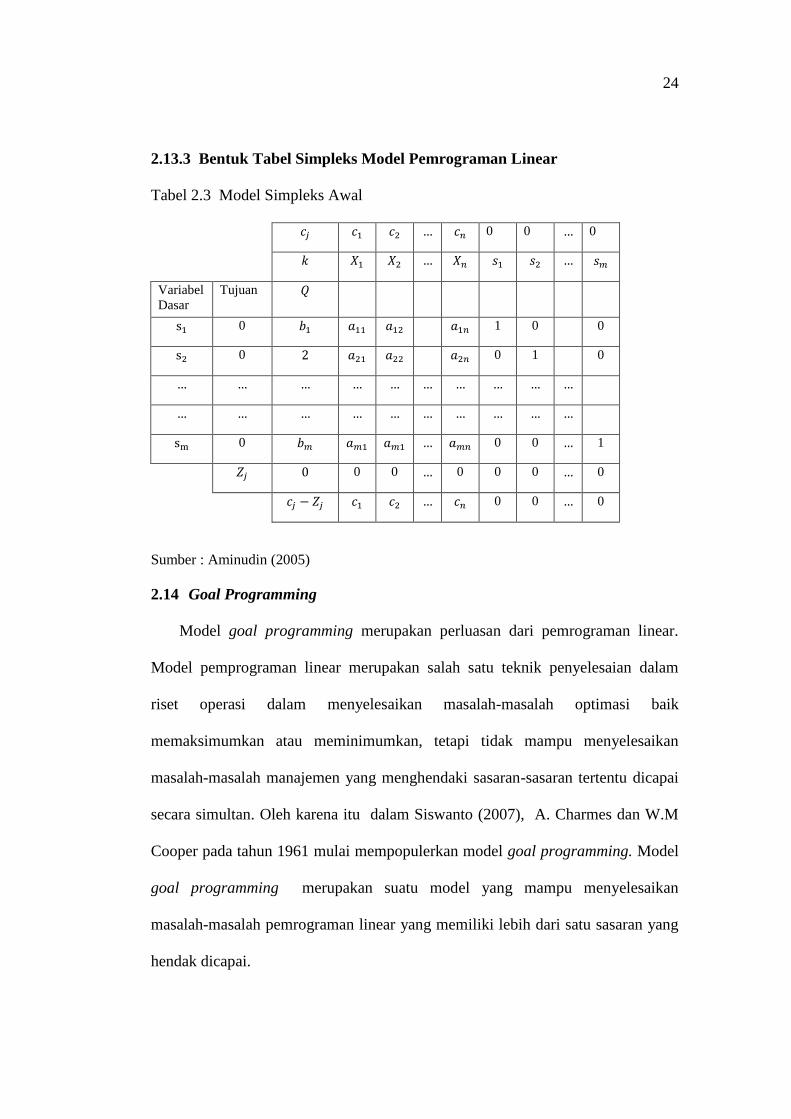
2.13.3 Bentuk Tabel Simpleks Model Pemrograman Linear
Tabel 2.3 Model Simpleks Awal
0 0 0
Variabel
Dasar
Tujuan
0 1 0 0
0 0 1 0
0 0 0 1
0 0 0 0 0 0
0 0 0
Sumber : Aminudin (2005)
2.14 Goal Programming
Model goal programming merupakan perluasan dari pemrograman linear.
Model pemprograman linear merupakan salah satu teknik penyelesaian dalam
riset operasi dalam menyelesaikan masalah-masalah optimasi baik
memaksimumkan atau meminimumkan, tetapi tidak mampu menyelesaikan
masalah-masalah manajemen yang menghendaki sasaran-sasaran tertentu dicapai
secara simultan. Oleh karena itu dalam Siswanto (2007), A. Charmes dan W.M
Cooper pada tahun 1961 mulai mempopulerkan model goal programming. Model
goal programming merupakan suatu model yang mampu menyelesaikan
masalah-masalah pemrograman linear yang memiliki lebih dari satu sasaran yang
hendak dicapai.
25
Perbedaan antara model pemrograman linear dengan model goal
programming terletak pada kehadiran variabel yang berfungsi untuk menampung
kelebihan dan kekurangan nilai ruas kiri suatu fungsi kendala agar sama dengan
nilai ruas kanannya. Jika dalam model pemrograman linear menghadirkan
variabel slack dan surplus maka pada goal programming menghadirkan variabel
deviasional di atas sasaran dan variabel deviasional di bawah sasaran. Di samping
itu, perbedaan juga terletak pada kendala fungsional. Jika dalam model
pemrograman linear kendala-kendala fungsional menjadi pembatas bagi usaha
pemaksimuman atau peminimuman fungsi tujuan maka pada model goal
programming kendala-kendala fungsional itu merupakan sarana untuk
mewujudkan sasaran yang hendak dicapai (Siswanto, 2007).
2.14.1 Variabel Deviasional
Variabel deviasional merupakan suatu variabel yang berfungsi untuk
menampung penyimpangan atau deviasi hasil yang akan terjadi pada nilai ruas
kiri suatu persamaan kendala terhadap nilai ruas kanannya. Variabel deviasional
harus diminimumkan di dalam fungsi tujuan agar nilai ruas kiri suatu persamaan
kendala sebisa mungkin mendekati nilai ruas kanannya. Variabel deviasional
dibedakan menjadi dua (Siswanto, 2007) yaitu:
a. Variabel deviasional berada di bawah sasaran
Variabel deviasional ini berfungsi untuk menampung deviasi negatif, karena
variabel deviasional berfungsi untuk menampung deviasi negatif,
maka :
26
∑∑
atau
∑∑
dengan merupakan variabel keputusan untuk produk ke- ( = 1,2,3,..., )
dengan periode ke- ( = 1,2,3,..., ); merupakan koefisien dari variabel
keputusan untuk produk ke- dengan periode ke- , merupakan besar target
ke- yang diinginkan, merupakan besarnya penyimpangan negatif ke-
untuk . Sehingga variabel deviasional akan selalu
mempunyai koefisien pada setiap kendala sasaran.
b. Variabel deviasional berada di atas sasaran
Variabel deviasional ini berfungsi untuk menampung deviasi positif. Karena
variabel deviasional berfungsi untuk menampung deviasi positif, maka:
∑∑
atau
∑∑
dengan merupakan besarnya penyimpangan positif ke- , sehingga
variabel deviasional akan selalu mempunyai koefisien 1 pada setiap
kendala sasaran.

27
Berdasarkan persamaan di atas dapat dilihat bahwa nilai penyimpangan
minimum di bawah ataupun di atas sasaran adalah nol dan tidak mungkin negatif,
atau
dan untuk dan
Secara matematis, bentuk umum kendala sasaran adalah:
∑∑
atau
∑∑
2.14.2 Fungsi Tujuan
Menurut Siswanto (2007), fungsi tujuan di dalam model goal programming
ditandai dengan kehadiran variabel deviasional yang harus diminimumkan.
Berdasarkan persamaan , dapat diketahui bahwa sasaran yang telah
ditetapkan akan tercapai bila variabel deviasional dan minimum
dalam fungsi tujuan, sehingga fungsi tujuan model goal programming adalah:
∑
2.14.3 Empat Macam Kendala Sasaran
Menurut Siswanto (2007), penggunaan variabel deviasional dapat
dikelompokan ke dalam empat cara yaitu:
a. Mewujudkan suatu sasaran dengan nilai tertentu
Sasaran yang dikehendaki dituangkan ke dalam nilai ruas kanan kendala
( . Agar sasaran ini tercapai, maka penyimpangan di bawah dan di atas
28
nilai harus diminimumkan. Oleh karena itu dibutuhkan kehadiran variabel
deviasional dan akibatnya fungsi persamaan kendala sasaran
menjadi:
∑∑
dan persamaan fungsi tujuan:
∑
Penyelesaian optimal, apabila maka ini berarti terjadi
penyimpangan di atas nilai (sasaran terlampaui), sedangkan jika
maka ini berarti terjadi penyimpangan di bawah nilai (sasaran
tidak terlampaui).
b. Mewujudkan suatu sasaran di bawah nilai tertentu
Sasaran yang hendak dicapai dituangkan ke dalam parameter (nilai ruas
kanan kendala). Agar sasaran tersebut tidak terlampaui maka dibutuhkan
kehadiran variabel deviasional sehingga fungsi persamaan kendala
sasaran:
∑∑
dan persamaan fungsi tujuan:
∑
29
Penyelesaian optimal, bila maka sasaran tercapai akan tetapi bila
maka terjadi penyimpangan di atas dan hal ini menunjukkan
bahwa sasaran yang dikehendaki telah terlampaui.
c. Mewujudkan suatu sasaran di atas nilai tertentu
Sasaran yang hendak dicapai dituangkan ke dalam parameter (nilai ruas
kanan kendala). Agar sasaran tersebut terlampaui, maka dibutuhkan
kehadiran variabel deviasional sehingga fungsi persamaan kendala
sasaran:
∑∑
dan persamaan fungsi tujuan:
∑
Penyelesaian optimal, jika bernilai nol berarti sasaran tercapai
sedangkan jika bernilai positif berarti sasaran yang dikehendaki tidak
terlampaui.
d. Mewujudkan suatu sasaran pada nilai interval tertentu
Bila interval itu dibatasi oleh dan maka penyelesaian yang
diharapkan akan berada di antara interval tersebut atau,
∑∑
Penyimpangan-penyimpangan pada persamaan harus diminimumkan.
Oleh karena itu, perlu menghadirkan untuk membatasi penyimpangan
30
di bawah dan perlu juga untuk menghadirkan untuk membatasi
penyimpangan di atas
Dengan demikian persamaan menjadi:
∑∑
Dalam hal ini, persamaan setara dengan:
∑∑
atau
∑∑
Agar dan minimum, maka persamaan fungsi tujuan minimumkan
∑ ; Pertidaksamaan dan adalah fungsi kendala
sasaran di mana sasaran itu berada pada interval dan . Agar peranan
kendala sasaran dan variabel deviasional itu menjadi semakin jelas, maka
bisa saja mengubah kedua bentuk fungsi pertidaksamaan tersebut menjadi
fungsi-fungsi persamaan dengan cara menambahkan variabel baru yaitu
dan yang berfungsi sebagai variabel slack dan surplus, yaitu:
∑∑
atau
∑∑
31
Variabel dan pada persamaan dan bukan
merupakan variabel deviasional dan kehadirannya tidak diperhitungkan di
dalam fungsi tujuan. Oleh karena itu, fungsinya benar-benar seperti variabel
slack dan surplus di mana nilainya sangat tergantung kepada hasil
penyelesaian optimal. Dengan demikian, peminimuman dan akan
menggiring penyelesaian optimal berada di antara interval dan
2.14.4 Bentuk Umum Model
Secara umum model goal programming (Siswanto, 2007), dapat dirumuskan
sebagai berikut:
∑
dengan kendala:
dan , untuk;
2.14.5 Kasus Goal Programming
Pada dasarnya terdapat dua kasus goal programming yang perlu
diperhatikan (Lasmanah, 2003), yaitu:
1. Preemptive Goal Programming
Preemtive goal programming merupakan suatu permasalahan muncul ketika
permasalahan yang dihadapi memiliki satu tujuan atau lebih penting dari
32
tujuan yang lain. Jadi dalam menyelesaikan permasalahan tersebut, maka
perhatian pertama dipusatkan pada tujuan yang menjadi prioritas pertama,
selanjutnya tujuan yang menjadi prioritas kedua, sampai pada banyaknya
tujuan yang akan menjadi prioritas selanjutnya (Lasmanah, 2003).
2. Program Tujuan Non-Preemptive Goal Programming
Program tujuan non- preemptive yaitu suatu program tujuan dengan tujuan
yang sama pentingnya sehingga tidak perlu adanya urutan tingkat prioritas.
Dengan kata lain, prioritas satu dengan prioritas lainnya mempunyai tingkat
kepentingan yang sama.
Permasalahan preemptive goal programming diselesaikan dengan cara
penyelesaian prosedur sekuensi dengan tahapan-tahapan sebagai berikut
(Lasmanah, 2003):
i. Tujuan-tujuan yang pertama dicakup adalah tujuan-tujuan prioritas
pertama yang diselesaikan dengan metode simpleks.
ii. Jika hasil perhitungan tahap pertama diperoleh penyelesaian optimal
yang sama dengan , maka harus menambahkan tujuan-tujuan
prioritas kedua ke dalam model, dengan ketentuan:
a. Jika , variabel-variabel pembantu yang mencerminkan
penyimpangan-penyimpangan dari tujuan-tujuan prioritas pertama
sekarang dapat dikeluarkan dari model, di mana kendala-kendala
persamaan yang mencakup variabel-variabel ini diganti oleh
persamaan atau pertidaksamaan untuk tujuan-tujuan ini.
33
b. Jika , maka model tahap kedua adalah menambahkan tujuan-
tujuan prioritas kedua ke dalam model tahap pertama, tetapi hal ini
juga menambahkan kendala bahwa fungsi tujuan tahap pertama harus
sama dengan (yang memungkinkan untuk menghilangkan unsur-
unsur yang mencakup tujuan-tujuan prioritas pertama dari fungsi
tujuan tahap kedua). Selanjutnya, mengulangi proses yang satu untuk
tujuan-tujuan prioritas yang lebih rendah.
2.14.6 Bentuk Model Preemptive Goal Programming
Model umum suatu persoalan preemptive goal programming dapat
dirumuskan sebagai berikut (Lasmanah, 2003):
∑
dengan kendala:
∑∑
dengan , untuk ; ; ; dan
Dengan menyatakan prioritas dengan urutan kepentingan ke-
dan periode ke- untuk . menyatakan urutan prioritas pertama
untuk periode ke- , menyatakan urutan prioritas kedua untuk periode ke- ,
sampai dengan menyatakan urutan prioritas ke- untuk periode ke- .