PAM
9
SISTEM TELEKOMUNIKASI DIGITAL TUGAS MODULASI PAM, PWM dan PPM SISI TRANSMITTER DAN RECEIVER PEMBIMBING : Rachmat Saptono., ST.MT PENYUSUN : AINNUR RAHAYU PRATIWI 1441160021 / JTD 2B JARINGAN TELEKOMUNIKASI DIGITAL
-
Upload
ainnur-rahayu-pratiwi -
Category
Documents
-
view
20 -
download
0
description
Sistem Komunikasi Digital
Transcript of PAM

SISTEM TELEKOMUNIKASI DIGITALTUGAS
MODULASI PAM, PWM dan PPM SISI TRANSMITTER DAN RECEIVER
PEMBIMBING :Rachmat Saptono., ST.MT
PENYUSUN :AINNUR RAHAYU PRATIWI
1441160021 / JTD 2B
JARINGAN TELEKOMUNIKASI DIGITALTEKNIK ELEKTRO
POLITEKNIK NEGERI MALANG2015

MODULASI PAM (Pulse Amplitude Modulation)
Pada PAM (Pulse Amplitude Modulation), amplitudo pulsa-pulsa pembawa dimodulasi
oleh sinyal pemodulasi. Amplitudo pulsa-pulsa pembawa menjadi sebanding dengan
amplitudo sinyal pemodulasi. Semakin besar amplitudo sinyal pemodulasi maka semakin
besar pula amplitudo pulsa pembawa.
Pembentukan sinyal termodulasi PAM dapat dilakukan dengan melakukan pencuplikan
(sampling), yaitu mengalikan sinyal pencuplik dengan sinyal informasi. Proses ini akan
menghasilkan pulsa pada saat pencuplikan yang besarnya sesuai dengan sinyal informasi
(pemodulasi). Pada proses pemodulasian ini perlu diperhatikan bahwa kandungan informasi
pada sinyal pemodulasi tidak boleh berkurang. Hal ini dapat dilakukan dengan persyaratan
bahwa pencuplikan harus dilakukan dengan frekuensi minimal dua kali frekuensi maksimum
sinyal pemodulasi (2.fm), atau sering disebut dengan syarat Nyquist. Jika frekuensi sinyal
pencuplik dinotasikan dengan fs dan frekuensi maksimum sinyal pemodulasi dinotasikan
dengan fm, maka syarat Nyquist dapat ditulis sebagai:
fs ≥ 2 fm
Disamping itu proses modulasi amplitudo pulsa dapat terjadi apabila memenuhi teorema
Nyuist tentang laju pencuplikan (sampling). Pencuplikan (sampling) terjadi pada sinyal
analog dengan laju paling sedikit dua kali frekuensi tertinggi dari masukan sinyal analog
asli. Teorema Nyquist : fs ≥ 2 fm
Dimana :
fs = frekuensi sampling ( pencuplikan )
fm = frekuensi maksimum sinyal analog
Jika frekuensi sampling lebih rendah dari dua kali frekuensi maksimum sinyal input analog
maka terjadi overlap (tumpang tindih).

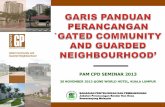
Gambar : Modulasi PAM
Macam-macam Modulasi PAM
1. Sampling PAM Alami
Sampling Alami (Natural Sampling) terjadi bila pada modulator digunakan pulsa–pulsa
dengan lebar terbatas, tetapi puncak–puncak pulsa dipaksa untuk mengikuti bentuk
gelombang modulasi.
2. Sampling PAM dengan Puncak – Rata
Sampling PAM dengan Puncak–Rata (flat topped sampling) adalah proses dimana
pulsa–pulsa dengan lebar terbatas dimodulasi kemudian dihasilkan puncak-puncak yang
rata. Maka lebar pulsa harus dibentuk jauh lebih kecil daripada perioda sampling Ts,
sehingga bentuk gelombang yang disampel berpuncak rata dilewatkan pada sebuah filter
low pass akan diperoleh kembali gelombang modulasi tanpa cacat (distorsi).
3. Modulasi 4-PAM
Pada modulasi pulsa, pembawa informasi berupa deretan pulsa-pulsa. Pembawa yang
berupa pulsa-pulsa ini kemudian dimodulasi oleh sinyal informasi, sehingga
parameternya berubah sesuai dengan besarnya amplitudo sinyal pemodulasi (sinyal
informasi). Teknik modulasi pulsa mulai menggantikan sistem analog, karena beberapa
keuntungan antara lain:
1. Kebal terhadap derau.
2. Sirkuit digital cenderung lebih murah.

3. Jarak transmisi yang dapat ditempuh lebih jauh (dengan penggunaan pengulang
regeneratif).
4. Rentetan pulsa digital dapat disimpan.
5. Sinyal direpresentasikan dengan 4 nilai besaran amplitudo dari gelombang
pembawa.
Jika pulsa-pulsa dikirim dengan pesat fs bit per detik maka pulsa-pulsa tersebut akan
mencapai amplitude penuhnya jika dilewatkan LPF dengan lebar bidang fs/2 Hz. Maka
dimungkinkan untuk mengirim 2 simbol per detik per hz tanpa terjadi interferensi antar
simbol pada PAM 4 level berarti 1 simbol terdiri atas 2 bit maka secara teoritis 4-PAM
dapat mentransmisikan 4 b/s/hz (yaitu 2 x 2 = 4).
MODULASI PPM (Pulse Position Modulation)
Pulse posisi modulasi (PPM) adalah modulasi pulsa teknik yang menggunakan pulsa
yang tinggi seragam dan lebar tapi pengungsi di waktu dari beberapa posisi dasar sesuai dengan
amplitudo dari sinyal di instan sampling. Pulse posisi modulasi juga kadang-kadang dikenal
sebagai pulsa-fase modulasi. Pulse posisi modulasi telah keuntungan lebih dari pulsa amplitudo
modulation (PAM) dan durasi pulsa modulasi (PDM) dalam hal ini memiliki kekebalan tinggi
kebisingan karena semua penerima perlu lakukan adalah mendeteksi adanya pulsa pada waktu
yang tepat; durasi dan amplitudo dari pulsa tidak penting.
Pulse Position Modulation merupakan bentuk modulasi pulsa yang mengubah-ubah
posisi pulsa (dari posisi tak termodulasinya) sesuai dengan besarnya tegangan sinyal pemodulasi.
Semakin besar tegangan sinyal pemodulasi (informasi) maka posisi pulsa PPM menjadi semakin
jauh dari posisi pulsa tak-termodulasinya.
Modulasi posisi pulsa adalah modulasi sinyal teknik yang memungkinkan komputer
untuk berbagi data dengan mengukur waktu setiap paket data yang dibutuhkan untuk mencapai
komputer. Hal ini sering digunakan dalam komunikasi optik, seperti serat optik, di mana ada
sedikit multi-jalur gangguan. Modulasi posisi pulsa eksklusif transfer sinyal digital dan tidak
dapat digunakan dengan sistem analog.

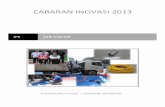
Gambar : Modulasi PPM
MODULASI PWM (Pulse-Width Modulation)
Pada modulasi PWM, lebar pulsa pembawa diubah-ubah sesuai dengan besarnya
tegangan sinyal pemodulasi. Semakin besar tegangan sinyal pemodulasi (informasi) maka
semakin lebar pula pulsa yang dihasilkan. Modulasi PWM juga dikenal sebagai Pulse Duration
Modulation (PDM).
PWM, Pulse-Width Modulation, adalah salah satu jenis modulasi. Modulasi PWM
dilakukan dengan cara merubah lebar pulsa dari suatu pulsa data. Total 1 perioda (T) pulsa dalam
PWM adalah tetap, dan data PWM pada umumnya menggunakan perbandingan pulsa positif
terhadap total pulsa.
Penggunaan Modulasi PWM:
1. PWM sebagai data keluaran suatu perangkat. PWM dapat digunakan sebagai data dari
suatu perangkat, data direpresentasikan dengan lebar pulsa positif (Tp).
2. PWM sebagai data masukan kendali suatu perangkat. Selain sebagai data keluaran, PWM
pun dapat digunakan sebagai data masukan sebagai pengendali suatu perangkat. Salah
satu perangkat yang menggunakan data PWM sebagai data masukannya adalah Motor
DC Servo. Motor DC Servo itu sendiri memiliki dua tipe: 1. Kontinyu, 2. Sudut. Pada

tipe 1., PWM digunakan untuk menentukan arah Motor DC Servo, sedangkan pada tipe
2., PWM digunakan untuk menentukan posisi sudut Motor DC Servo.
3. PWM sebagai pengendali kecepatan Motor DC bersikat. Motor DC bersikat atau Motor
DC yang biasa ditemui di pasaran yang memiliki kutub A dan kutub B yang jika
diberikan beda potensial diantara kedua-nya, maka Motor DC akan berputar. Pada
prinsipnya Motor DC jenis ini akan ada waktu antara saat beda potensial diantara
keduanya dihilangkan dan waktu berhentinya. Prinsip inilah yang digunakan untuk
mengendalikan kecepatan Motor DC jenis ini dengan PWM, semakin besar lebar pulsa
positif dari PWM maka akan semakin cepat putaran Motor DC. Untuk mendapatkan
putaran Motor DC yang halus, maka perlu dilakukan penyesuaian Frekuensi (Perioda
Total) PWM-nya.
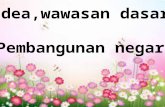
Gambar : Pembangkitan sinyal PWM
Gambar : Modulasi PWM

Gambar keluaran sinyal dari PAM, PPM dan PWM