PANDUAN Kontes Robot Pemadam Api Indonesia (KRPAI)...
43
2013 PANDUAN Kontes Robot Pemadam Api Indonesia (KRPAI) Beroda dan Berkaki 2013
Transcript of PANDUAN Kontes Robot Pemadam Api Indonesia (KRPAI)...

2013
PANDUAN Kontes Robot Pemadam Api Indonesia
(KRPAI) Beroda dan Berkaki 2013
Kontes Robot Pemadam Api Indonesia (KRPAI) 2013
Robot Pemadam Api
13-16 Juni 2013
Direktorat Penelitian dan Pengabdian kepada Masyarakat
Direktorat Jenderal Pendidikan Tinggi Kementerian Pendidikan Nasional
DAFTAR ISI
Halaman
Sambutan Direktur Jenderal Pendidikan Tinggi 1
Sambutan Direktur Penelitian Dan Pengabdian Pada Masyarakat 2
Latar Belakang 3
Maksud dan Tujuan 3
Tema 3
Divisi 4
Pertandingan 4
Peserta 4
Pendaftaran 4
Evaluasi 5
Penggantian 6
Penghargaan 6
Jadwal 6
Waktu dan Tempat 7
Akomodasi 7
Alamat Penyelenggara 7
Susunan Panitia KRPAI 2013 8
Lampiran 1: Formulir Pengajuan 9
Lampiran 2: Panduan Peraturan Kontes Robot Pemadam Api Indonesia (KRPAI) 2013
Divisi Beroda Dan Berkaki 15
Panduan KRPAI 2013 – ver 10/17/2012 1
Sambutan Direktur Jenderal Pendidikan Tinggi Salah satu tujuan pendidikan tinggi adalah menumbuh-kembangkan dan memperkaya khasanah Ilmu Pengetahuan dan Teknologi untuk meningkatkan taraf kehidupan masyarakat. Untuk itu kegiatan penumbuhan dan pengembangan kreativitas dan inovasi dosen dan mahasiswa menjadi kata kunci untuk menghantarkan tercapainya tujuan tersebut. Dalam penumbuhan dan pengembangan kreativitas dan inovasi tidaklah cukup hanya berada pada wacana teoritis saja, akan tetapi harus dilatih untuk mengimplementasikan ide, gagasan dalam wacana-teoritis tersebut ke dalam dunia nyata. Kegiatan pengembangan gagasan teoritis menjadi penerapan teknologi yang nyata harus dibuat sedemikian rupa agar menjadi menarik, dinamis dan tidak membosankan, dimana dosen dan mahasiswa perlu dilibatkan secara multidisiplin. Sehubungan dengan itu, saya menyambut baik penyelenggaraan Kontes Robot Pemadam Api Indonesia (KRPAI), karena dalam KRPAI setiap peserta harus mengeksplorasi kemampuannya dalam perancangan, implementasi, dan strategi serta harus mengembangkan ide-idenya untuk dapat membuat dan merancang suatu wahana bergerak berbentuk robot dengan berbagai bentuk dan struktur serta kecerdasan agar dapat memenuhi tema dan aturan main yang telah ditentukan dan dapat berkompetisi secara sportif dalam arena yang telah ditentukan. Disinilah letak pentingnya kemampuan kreativitas, inovasi dan strategi yang dikembangkan oleh setiap tim peserta. Oleh sebab itu, sejak awal dimulainya KRPAI, Direktorat Jenderal Pendidikan Tinggi selalu memberikan dukungan penuh terhadap pelaksanaan KRPAI tersebut. KRPAI 2013 kali ini akan dilaksanakan secara regional dan pemenangnya akan dikirim mewakili wilayahnya untuk bertanding dalam kontes nasional KRPAI 2013 yang akan diselenggarakan pada tanggal 15-17 Juni 2013. KRPAI 2013 diharapkan mampu menjadi wahana untuk unjuk prestasi dalam perancangan, implementasi dan strategi dari mahasiswa Indonesia, sekaligus sebagai tontonan dan hiburan yang menarik yang sarat dengan ide-ide pengembangan Ilmu Pengetahuan dan Teknologi. Dalam kesempatan ini Direktorat Jenderal Pendidikan Tinggi mengundang seluruh Perguruan Tinggi di Indonesia untuk berpartisipasi dalam KRPAI 2013 ini. Selamat berpartisipasi, semoga dengan KRPAI 2013 kemampuan mahasiswa dan kualitas pendidikan tinggi di Indonesia dapat terus ditingkatkan.
Jakarta, Oktober 2012, Direktur Jenderal Pendidikan Tinggi,
Prof.Dr. Ir. Djoko Santoso
Panduan KRPAI 2013 – ver 10/17/2012 2
Sambutan Direktur Penelitian Dan Pengabdian Pada Masyarakat Untuk menumbuh kembangkan ilmu Pengetahuan dan Teknologi serta meningkatkan mutu pendidikan tinggi di Indonesia, perlu di fasilitasi kegiatan yang dapat mendukung penumbuhan dan pengembangan kreativitas dan inovasi para mahasiswa beserta dosen baik dari segi teoritis maupun penerapan praktisnya. Dalam hal ini Kontes Robot Pemadam Api Indonesia (KRPAI) dapat merupakan suatu wacana yang sangat menarik bagi mahasiswa untuk mengimplementasikan gagasan dan ide-ide mereka menjadi suatu robot yang fungsional dengan memanfaatkan pengetahuan mereka yang multidisiplin. Robot–robot tersebut harus dirancang dan dibuat sendiri, dengan menggunakan sensor-sensor, aktuator serta mikrokomputer yang ada dan harus diprogramkan sesuai dengan tema kontes setiap tahunnya. Selain itu kerjasama yang baik antara anggota tim peserta juga akan menjadi faktor pendukung suksesnya suatu tim dalam kontes ini. Setiap tim akan memiliki gagasan strategi yang terbaik untuk dapat memenangkan kontes tersebut dan akan diuji dalam kontes tersebut, sehingga dapat menimbulkan suasana kompetisi yang kondusif dikalangan mahasiswa, dosen maupun perguruan tinggi yang berpartisipasi dalam kontes tersebut. KRPAI 2013 kali ini akan dilaksanakan secara regional dan pemenang kontes regional akan dikirim mewakili wilayahnya untuk bertanding dalam kontes nasional KRPAI 2013 yang akan diselenggarakan di Jakarta pada tanggal 13-17 Juni 2013. KRPAI 2013 diharapkan mampu menjadi wahana unjuk prestasi dalam perancangan, implementasi dan strategi dari mahasiswa Indonesia, sekaligus sebagai tontonan dan hiburan yang menarik yang sarat dengan ide-ide pengembangan Ilmu Pengetahuan dan Teknologi. Dalam kesempatan ini Direktorat Penelitian dan Pengabdian kepada Masyarakat, Direktorat Perguruan Tinggi, mendorong seluruh Perguruan Tinggi di Indonesia untuk berpartisipasi dalam KRPAI 2013 ini. Selamat berpartisipasi, semoga dengan KRPAI 2013 kemampuan mahasiswa dan dosen, serta kualitas pendidikan tinggi di Indonesia dapat terus ditingkatkan.
Jakarta, Oktober 2012, Dirlitabmas Dikti,
Agus Subekti
Panduan KRPAI 2013 – ver 10/17/2012 3
1 LATAR BELAKANG
Indonesia telah mengadakan beberapa kali Kontes Robot Indonesia (KRI), dimana pemenangnya sebagai wakil Indonesia untuk mengikuti kontes robot tingkat internasional yang diselenggarakan di beberapa negara Asia seperti Jepang, Thailand, Korea Selatan, Cina, Malaysia, Vietnam dan lain-lain. Bahkan salah satu peserta yang mewakili Indonesia pada tahun 2001 yaitu tim B-Cak dari PENS (Politeknik Elektronika Negeri Surabaya) pernah memenangkan Juara Pertama pada Asia-Pacific Broadcasting Union (ABU) Robocon yang diselenggarakan di Koriyama, Fukushima–Jepang. Kegiatan KRI tersebut telah diselenggarakan secara berkala tiap tahun oleh Direktorat Jenderal Pendidikan Tinggi cq. Direktorat Pembinaan Penelitian dan Pengabdian kepada Masyarakat terutama guna mendorong penguasaan teknologi maju bagi para mahasiswa teknik di Indonesia. Pada saat penyelenggaraan KRI Tahun 2003, dirasakan perlunya suatu jenis kontes robot serupa yang secara khusus memiliki kecerdasan buatan. Oleh karena itu, pada tahun 2004 diselenggarakanlah Kontes Robot Cerdas Indonesia (KRCI) untuk yang pertamakalinyda guna mendorong peningkatan kualitas robot terutama pada sistem kontrolnya. Sejak tahun 2013, namanya sepakat diganti dengan Kontes Robot Pemadam Api Indonesia (KRPAI). Penyelenggaraan KRPAI ini, diharapkan dapat berjalan secara paralel dan saling melengkapi dengan penyelenggaraan KRI dimasa-masa mendatang, sehingga diharapkan kemampuan robot yang akan ikut dalam kontes robot tersebut akan semakin meningkat secara tajam. Keberhasilan penyelenggaraan KRPAI selama ini dapat dibuktikan dengan perolehan medali emas dua kali untuk kategori Fire Fighting Robot Contest beroda dan berkaki pada Intelligent Fire-Fighting Robot Contest yang diselenggarakan di Trinity College, Hartford, Connecticut, Amerika Serikat. Format aturan pertandingan dalam KRPAI 2013 dipilih dari aturan kontes robot sejenis yang telah diselenggarakan secara teratur yaitu Intelligent Fire-Fighting Robot Contest yang diselenggarakan di Trinity College, Hartford, Connecticut, Amerika Serikat dan telah berlangsung lebih dari empat belas tahun.
2 MAKSUD DAN TUJUAN
Maksud dan tujuan KRPAI 2013 adalah:
1. Menumbuh kembangkan dan meningkatkan kreatifitas mahasiswa di Perguruan Tinggi. 2. Mengaplikasikan Ilmu Pengetahuan dan Teknologi kedalam dunia nyata. 3. Meningkatkan kepekaan mahasiswa dalam pengembangan bidang teknologi robotika. 4. Membudayakan iklim kompetisi dilingkungan perguruan tinggi. 5. Mendukung pengembangan dan penggunaan sistem kontrol yang lebih maju pada
rancangan robot. 3 TEMA
Tema untuk Kontes Robot Pemadam Api Indonesia 2013 adalah: Robot Pemadam Api
Panduan KRPAI 2013 – ver 10/17/2012 4
4 DIVISI
KRPAI 2013 dibagi dalam 2 Divisi, yaitu:
Divisi Beroda Robot Pemadam Api Suatu divisi dimana robot menggunakan roda sebagai alat geraknya dengan misi mencari dan
memadamkan api di arena lapangan berbentuk simulasi interior suatu rumah. Pada divisi ini yang diutamakan adalah kemampuan robot bernavigasi dan bermanuver serta kecepatan dalam menyelesaikan misinya tersebut. Robot yang berhasil menemukan dan memadamkan api tercepat dinyatakan sebagai pemenang.
Divisi Berkaki Robot Pemadam Api
Sama halnya dengan Divisi Beroda, hanya saja robot menggunakan kaki sebagai alat geraknya.
5 PERTANDINGAN
KRPAI 2013 diselenggarakan dalam 2 tingkatan pertandingan yaitu Tingkat Regional dan
Tingkat Nasional.
KRPAI Tingkat Regional akan diselenggarakan di beberapa kota di Indonesia, untuk lebih jelas tentang tempat (lihat bagian Waktu dan Tempat).
Pemenang KRPAI tingkat Regional berpeluang untuk ikut pertandingan KRPAI tingkat Nasional (lihat bagian Evaluasi).
Untuk Divisi Beroda dan Berkaki, sistem pertandingan mengacu pada aturan pertandingan Internasional di Trinity College, Hartford, Connecticut, USA, dengan beberapa penyesuaian dengan aturan di Indonesia.
Peraturan pertandingan tingkat Regional dan Nasional adalah sama. 6 PESERTA
KRPAI Regional dan Nasional dapat diikuti oleh mahasiswa dari perguruan tinggi seluruh Indonesia di bawah koordinasi Ditjen Dikti, Kemendikbud.
Satu Tim KRPAI Beroda dan Berkaki terdiri dari 2 (dua) mahasiswa dan 1 (satu) dosen pembimbing.
7 PENDAFTARAN
Peserta mahasiswa yang ingin mendaftar diwajibkan mengirimkan proposal pengajuan ke Panitia KRPAI 2013 (lihat bagian Alamat Penyelenggara). Proposal ini merupakan syarat administratif pendaftaran dan tidak dipungut biaya. Peserta diwajibkan memenuhi format dan ketentuan yang berlaku, bila tidak, berdampak pada penolakan proposal.
Tim mahasiswa dari Perguruan Tinggi Negeri atau Perguruan Tinggi Swasta dapat mengajukan proposal ke Panitia KRPAI 2013 dengan persetujuan Wakil atau Pembantu Rektor/Ketua/Direktur/Dekan Bidang Kemahasiswaan masing-masing perguruan tinggi.
Panduan KRPAI 2013 – ver 10/17/2012 5
Satu Perguruan Tinggi hanya boleh mengajukan satu tim untuk masing-masing divisi
Format proposal dan Alamat dapat dilihat pada bagian Lampiran.
Proposal diterima paling lambat (lihat bagian Waktu dan Tempat). 8 EVALUASI
Evaluasi dilakukan dalam beberapa tahap an sebagai berikut: Tahap 1: Evaluasi proposal: Proposal yang terkumpul akan dievaluasi secara administratif dan akan dipergunakan sebagai syarat pendaftaran. Proposal yang diterima dan disetujui oleh panitia akan disampaikan kepada peserta melalui surat pemberitahuan ke alamat masing-masing. Tahap 2: Evaluasi laporan kemajuan: Bagi peserta yang lolos Evaluasi Tahap 1, diwajibkan untuk mengirimkan laporan kemajuan kepada panitia dalam bentuk CD dan diterima selambat-lambatnya pada waktu yang telah ditentukan (lihat bagian Waktu dan Tempat). CD harus berisi:
1. Foto Robot dan anggota tim dengan latar belakang Perguruan Tinggi masing-masing. 2. Clip video yang membuktikan bahwa robot sudah terealisir dan berfungsi, maks 5
menit/tim (gunakan format video yang umum: mpg, avi, dan lain-lain). 3. File Presentasi Power Point (softcopy).
Catatan: CD yang dikirim harus diberi pengantar dari Wakil atau Pembantu Rektor/ Ketua/Direktur/Dekan Bidang Kemahasiswaan masing-masing perguruan tinggi. Pada tahap ini, evaluasi dilakukan dengan melihat clip video yang diterima. Tunjukan minimal robot sudah dapat bernavigasi, bergerak dari home, mencari lilin dan mematikannya. Hasil evaluasi tahap ini akan diumumkan kepada peserta dan Panitia Regional melalui surat dan website paling lambat 2 minggu setelah batas akhir penerimaan laporan kemajuan. Bagi peserta yang diterima, berhak untuk mengikuti pertandingan tahap Regional. Tahap 3: Pertandingan Regional: Pada tahap ini, pertandingan dilangsungkan di kota-kota yang telah ditetapkan (lihat bagian Waktu dan Tempat). Panitia Nasional akan memantau langsung jalannya pertandingan untuk memastikan pertandingan berjalan sesuai peraturan yang berlaku. Hasil pertandingan Regional ini akan dibawa ke Pusat untuk dievaluasi. Tahap 4: Evaluasi hasil pertandingan regional: Evaluasi Tim-tim yang berhak untuk maju ke tingkat Nasional ditentukan sebagai berikut:
Juara 1, 2 dan 3 KRPAI Beroda dan Berkaki tingkat Regional (yaitu yang paling tidak satu kali berhasil menemukan dan memadamkan api), berhak mengikuti pertandingan KRPAI tingkat Nasional.
Bila terjadi kekurangan peserta, maka Panitia Nasional berhak menentukan peserta dengan meranking hasil keseluruhan pertandingan di tingkat Regional. Dengan demikian, tim-tim yang tidak menjadi juara 1, 2, dan 3 di suatu regional tertentu masih berpeluang untuk maju ketingkat Nasional.
Hasil evaluasi tahap ini akan diumumkan kepada peserta melalui website/millis KRI-KRPAI maupun surat paling lambat 1 minggu setelah seluruh pertandingan Regional diselesaikan. Bagi peserta yang lolos, berhak untuk mengikuti pertandingan tingkat Nasional.
Panduan KRPAI 2013 – ver 10/17/2012 6
Tahap 5: Pertandingan Nasional: Pemenang tingkat Nasional akan diumumkan hari itu juga disaat acara Penutupan, sesuai dengan hasil pertandingan tingkat Nasional. 9 PENGGANTIAN
Bagi Peserta yang lolos ke tingkat Nasional dan mengikuti pertandingan KRPAI 2013 tingkat nasional akan mendapatkan penggantian berupa dana bantuan pembuatan robot sebesar Rp 3.000.000,- per Tim. Peserta akan mendapatkan akomodasi selama 4 hari dan penggantian biaya transportasi. 10 PENGHARGAAN
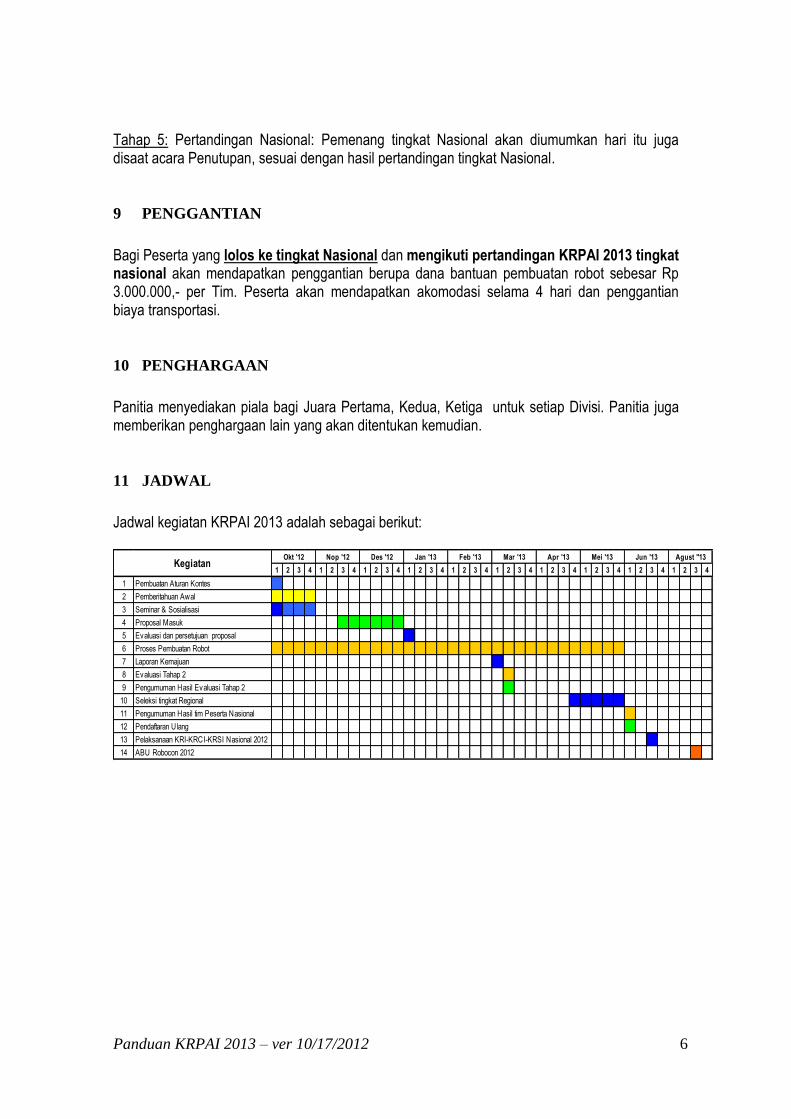
Panitia menyediakan piala bagi Juara Pertama, Kedua, Ketiga untuk setiap Divisi. Panitia juga memberikan penghargaan lain yang akan ditentukan kemudian. 11 JADWAL
Jadwal kegiatan KRPAI 2013 adalah sebagai berikut:
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1 Pembuatan Aturan Kontes
2 Pemberitahuan Awal
3 Seminar & Sosialisasi
4 Proposal Masuk
5 Evaluasi dan persetujuan proposal
6 Proses Pembuatan Robot
7 Laporan Kemajuan
8 Evaluasi Tahap 2
9 Pengumuman Hasil Evaluasi Tahap 2
10 Seleksi tingkat Regional
11 Pengumuman Hasil tim Peserta Nasional
12 Pendaftaran Ulang
13 Pelaksanaan KRI-KRCI-KRSI Nasional 2012
14 ABU Robocon 2012
Mei '13 Jun '13Kegiatan
Okt '12 Agust "13Nop '12 Des '12 Jan '13 Feb '13 Mar '13 Apr '13
Panduan KRPAI 2013 – ver 10/17/2012 7
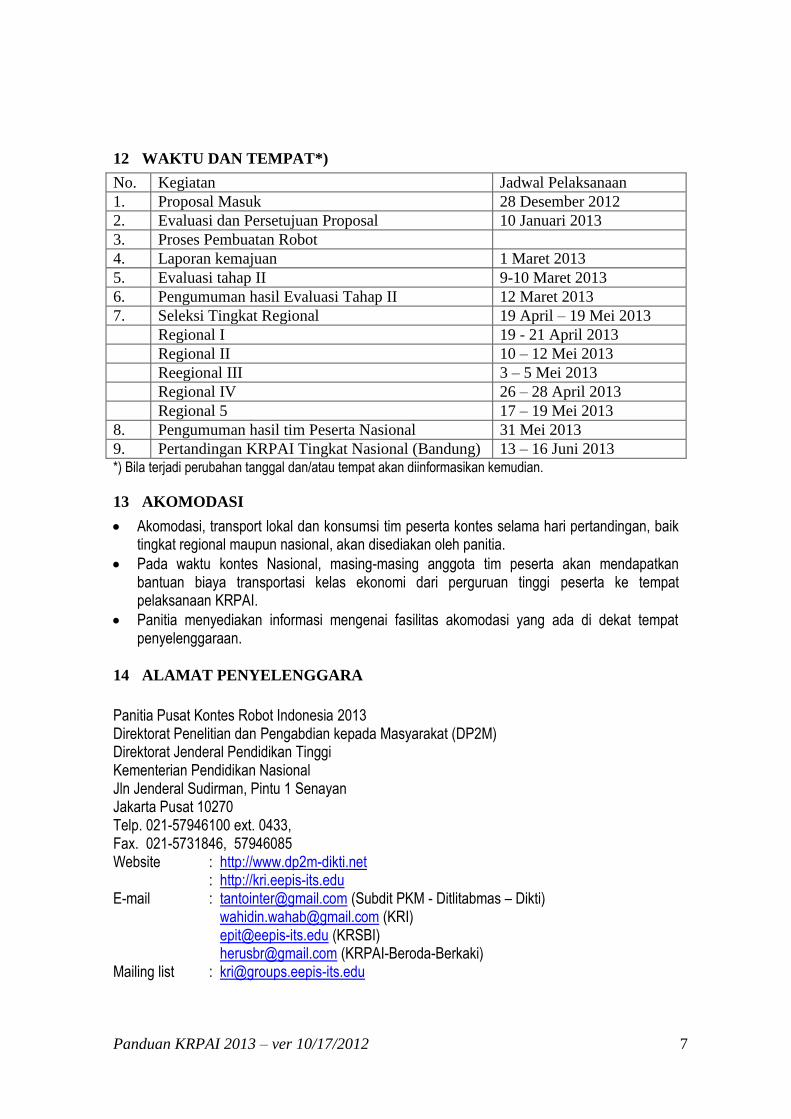
12 WAKTU DAN TEMPAT*)
No. Kegiatan Jadwal Pelaksanaan
1. Proposal Masuk 28 Desember 2012
2. Evaluasi dan Persetujuan Proposal 10 Januari 2013
3. Proses Pembuatan Robot
4. Laporan kemajuan 1 Maret 2013
5. Evaluasi tahap II 9-10 Maret 2013
6. Pengumuman hasil Evaluasi Tahap II 12 Maret 2013
7. Seleksi Tingkat Regional 19 April – 19 Mei 2013
Regional I 19 - 21 April 2013
Regional II 10 – 12 Mei 2013
Reegional III 3 – 5 Mei 2013
Regional IV 26 – 28 April 2013
Regional 5 17 – 19 Mei 2013
8. Pengumuman hasil tim Peserta Nasional 31 Mei 2013
9. Pertandingan KRPAI Tingkat Nasional (Bandung) 13 – 16 Juni 2013
*) Bila terjadi perubahan tanggal dan/atau tempat akan diinformasikan kemudian.
13 AKOMODASI
Akomodasi, transport lokal dan konsumsi tim peserta kontes selama hari pertandingan, baik tingkat regional maupun nasional, akan disediakan oleh panitia.
Pada waktu kontes Nasional, masing-masing anggota tim peserta akan mendapatkan bantuan biaya transportasi kelas ekonomi dari perguruan tinggi peserta ke tempat pelaksanaan KRPAI.
Panitia menyediakan informasi mengenai fasilitas akomodasi yang ada di dekat tempat penyelenggaraan.
14 ALAMAT PENYELENGGARA
Panitia Pusat Kontes Robot Indonesia 2013 Direktorat Penelitian dan Pengabdian kepada Masyarakat (DP2M) Direktorat Jenderal Pendidikan Tinggi Kementerian Pendidikan Nasional Jln Jenderal Sudirman, Pintu 1 Senayan Jakarta Pusat 10270 Telp. 021-57946100 ext. 0433, Fax. 021-5731846, 57946085 Website : http://www.dp2m-dikti.net : http://kri.eepis-its.edu E-mail : [email protected] (Subdit PKM - Ditlitabmas – Dikti)
[email protected] (KRI) [email protected] (KRSBI)
[email protected] (KRPAI-Beroda-Berkaki) Mailing list : [email protected]
Panduan KRPAI 2013 – ver 10/17/2012 8
15 SUSUNAN PANITIA KRPAI 2013
Pelindung:
Menteri Pendidikan Nasional Komisi Pengarah:
Gubernur
Dirjen Pendidikan Tinggi, Depdiknas
Direktur Penelitian dan Pengabdian pada Masyarakat, Depdiknas
Rektor Universitas
Dekan Fakultas Teknik Universitas
Direktur Utama TVRI Ketua Pelaksana:
Dekan Fakultas Teknik Wakil Ketua Pelaksana:
FT
DIKTI Sekretaris:
FT
DIKTI Publikasi dan Dokumentasi:
TVRI
Universitas
DIKTI Bendahara:
Universitas
DIKTI Perlengkapan:
Universitas
DIKTI Acara dan Pertandingan:
DIKTI
Universitas
Politeknik Akomodasi:
DIKTI
Universitas Transportasi:
DIKTI
Universitas Dana:
DIKTI
Universitas Keamanan:
DIKTI
Universitas
Panduan KRPAI 2013 – ver 10/17/2012 9
Lampiran 1
Formulir Pengajuan (Application Form)

Panduan KRPAI 2013 – ver 10/17/2012 10
KONTES ROBOT PEMADAM API INDONESIA 2013
(“ Robot Pemadam Api ” )
1. Setiap Institusi hanya diperkenankan mengirimkan 1(satu) tim saja. Tim
tambahan yang didaftarkan akan diabaikan.
2. Setiap Tim harus mengirim satu set syarat pendaftaran berupa Borang Aplikasi
atau Proposal. Format Borang Aplikasi atau proposal adalah seperti yang tertulis
dalam panduan ini dengan jumlah halaman tidak melebihi 25 (dua puluh lima)
halaman.
3. Borang Aplikasi harus disahkan/ditandatangani oleh Wakil Rektor/Ketua/
Direktur/Dekan Bidang Kemahasiswaan masing-masing Perguruan Tinggi.
4. Borang Aplikasi dan proposal harus sudah diterima oleh Panitia KRPAI 2013
paling lambat pada 28 Desember 2012 dengan alamat pengiriman:
Panitia Kontes Robot Pemadam Api Indonesia 2013
Subdit Kreativitas dan Pengabdian Kepada Masyarakat (KPM)
Direktorat Penelitian dan Pengabdian kepada Masyarakat (Ditlitabmas)
Direktorat Jenderal Pendidikan Tinggi
Kementrian Pendidikan dan Kebudayaan
Jln Jenderal Sudirman, Pintu 1 Senayan
Jakarta Pusat 10270
Telp. 021-70322640 Fax. 021-5731846
Website : http://dp2m-dikti.net
http://www.kri.or.id/ dan
http://kri.eepis-its.edu
E-mail : [email protected]
5. Borang Aplikasi atau Proposal setidaknya harus berisi informasi tentang anggota
tim, institusi, alamat lengkap, nomer telepon, alamat E-mail atau contact person, dan
juga berisi tentang deskripsi rinci tentang robot, meliputi: desain, gambar teknik,
strategi dan algoritma program kontrol robot.
6. Panitia KRPAI 2013 akan melakukan evaluasi peserta dalam dua tahap, yaitu tahap
pertama berupa evaluasi proposal (administratif), dan kedua, evaluasi berdasarkan
laporan kemajuan pembuatan robot. Jadwal rinci dapat disimak dibagian jadwal
kegiatan dalam panduan ini.
Borang Aplikasi / Proposal
Panduan KRPAI 2013 – ver 10/17/2012 11
BAGIAN SATU: INFORMASI TENTANG TIM PESERTA
1. TIM
Nama Tim maksimum 15 karakter dan nama mudah untuk disebutkan
…………………………………………………………………………….
Nama Ketua Tim (Mahasiswa)
………………………………..
Nama Instruktur (Dosen Pembimbing)
………………………………………..
2. INSTITUSI
Nama Lengkap Institusi :
……………………………………
Nama Departemen/Fakultas
…………………………………………
Alamat Kontak :
………………………………………………………………..
Nomer Telepon :………………… Nomer FAX : ………………………….
Nomer Telepon Mobile (HP):
……………………………….…..
Alamat E-mail :
……………………….
3. Alamat Lengkap, E-mail dan No. HP Contact Person
4. Jumlah Robot dan Jumlah gerak robot.
Jumlah Robot : satu (1) buah
Jumlah gerak robot: ………………
5. Divisi.
Beroda
Berkaki
Panduan KRPAI 2013 – ver 10/17/2012 12
BAGIAN DUA: INFORMASI TENTANG (MESIN) ROBOT
1. NAMA TIM ROBOT (hanya nama tim) : ______________________
(Tidak boleh mengindikasikan institusi yang bersangkutan)
2. ROBOT
Jumlah Robot : 1 (satu) buah
Jelaskan tentang mesin robot Anda, rencana/desain, strategi kontrol, algoritma
gerak, dilengkapi dengan sketch atau rancangan dasar mesin dalam gambar yang
mudah dievaluasi. Gunakan halaman terpisah untuk menerangkan dimensi,
struktur atau bahan yang dipakai, bagaimana mengaplikasikan sensor,
bagaimana metoda pendeteksian suara musik pengiring, dan bagaimana metoda
menepatkan waktu 3 menit perlombaan dengan sinkronisasi gerak tari robot.
Gunakan halaman tambahan jika dibutuhkan
3. STRATEGI
Jelaskan tentang strategi robot Anda, bagaimana cara untuk memperoleh poin
maksimal dalam perlombaan melalui gerak tari.

Panduan KRPAI 2013 – ver 10/17/2012 13
Gunakan halaman tambahan jika dibutuhkan
4. SKETCH (RANCANGAN SINGKAT)
Gambarlah desain singkat tentang rencana robot Anda dilengkapi dengan perkiraan
ukuran/dimensi. Perhatikan bahwa tinggi minimum robot adalah 50cm dan tinggi
maksimum adalah 60cm. Untuk diingat: Jangan mencantumkan info apapun dalam
gambar rancangan robot Anda yang mengindikasikan nama institusi Anda.

Panduan KRPAI 2013 – ver 10/17/2012 14
Gunakan halaman tambahan jika dibutuhkan
Panduan KRPAI 2013 – ver 10/17/2012 15
Lampiran 2
PANDUAN PERATURAN KONTES ROBOT PEMADAM API INDONESIA (KRPAI) 2013
DIVISI BERODA DAN BERKAKI ROBOT PEMADAM API
Panduan KRPAI 2013 – ver 10/17/2012 16
PANDUAN PERATURAN
KONTES ROBOT PEMADAM API INDONESIA (KRPAI) 2013 DIVISI BERODA DAN BERKAKI
ROBOT PEMADAM API
1 PENDAHULUAN
Peraturan untuk divisi Beroda dan Berkaki KRPAI 2013, mengacu pada peraturan yang dikeluarkan oleh Trinity College Fire Fighting Robot Contest (TCFFRC) 2013, Connecticut, Hartford, Amerika Serikat yang dapat dilihat dan diunduh pada alamat berikut: http://www.trincoll.edu/events/robot/Rules/Rules%202012/Rules_2012-Final-1-html/Rules_2012-Final-1.html Agar pertandingan di Indonesia menjadi lebih menarik maka dalam beberapa hal menuntut modifikasi dan penyesuaian dengan kondisi yang ada di Indonesia. Bila terjadi modifikasi dan penyesuaian oleh Panitia KRPAI maka peraturan yang berlaku adalah peraturan yang ditetapkan oleh Panitia KRPAI tersebut. Oleh sebab itu buku panduan ini lebih menitik beratkan bahasannya pada perubahan-perubahan tersebut selebihnya dapat mengacu pada aturan Internasional yang telah disebutkan di atas. Beberapa fitur dalam KRPAI 2013 antara lain:
1. Pertandingan bersifat “invidual trial”, yaitu masing-masing robot diharuskan melakukan 2 atau 3 sesi, di mana pada masing-masing sesi, waktu yang didapat dicatat. Waktu total adalah waktu yang diperlukan robot untuk menemukan dan mematikan lilin, setelah memperhitungkan bonus dan penalti. Pemenang adalah yang mempunyai akumulasi waktu total terendah.
2. Tidak ada pemilihan mode/bonus oleh peserta, seluruh mode/bonus akan diundi untuk menentukan konfigurasi lapangan.
3. Akan terdapat start di ruang 4 untuk mode Arbitrary-start. 4. Pengacakan orientasi lapangan.
Sensor Ultrasonik dan Infra-merah telah terlebih dahulu diuji kehandalannya sejak tahun 2006 menggunakan Sound-damper dan Cermin, maka mulai tahun 2011, sensor Kompas akan diuji kehandalannya dengan melakukan pengacakan orientasi lapangan.
5. Bonus Variable Door Location berubah dari 0.8 menjadi 0.45, dan bonus Extinguisher berubah dari 0.85 menjadi 0.75 (sesuai TCFFRC 2013).
Panduan KRPAI 2013 – ver 10/17/2012 17
2 ROBOT DAN KELENGKAPANNYA
2.1 Dimensi
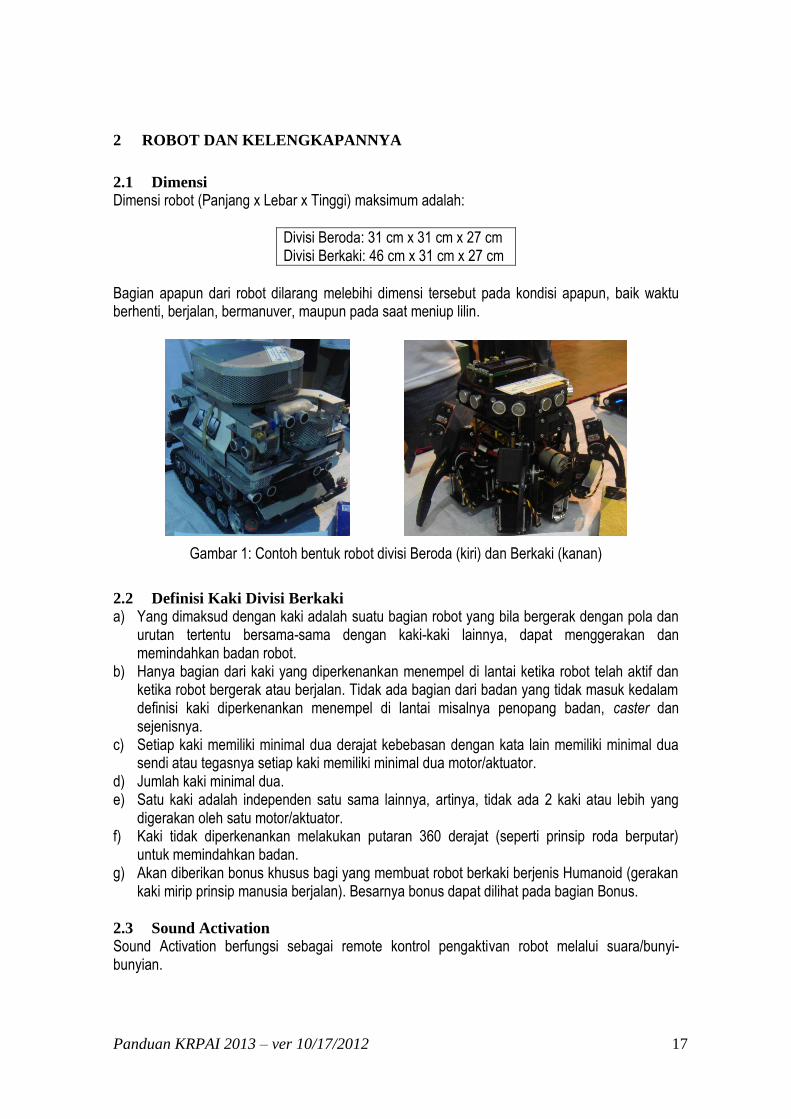
Dimensi robot (Panjang x Lebar x Tinggi) maksimum adalah:
Divisi Beroda: 31 cm x 31 cm x 27 cm Divisi Berkaki: 46 cm x 31 cm x 27 cm
Bagian apapun dari robot dilarang melebihi dimensi tersebut pada kondisi apapun, baik waktu berhenti, berjalan, bermanuver, maupun pada saat meniup lilin.
Gambar 1: Contoh bentuk robot divisi Beroda (kiri) dan Berkaki (kanan)
2.2 Definisi Kaki Divisi Berkaki
a) Yang dimaksud dengan kaki adalah suatu bagian robot yang bila bergerak dengan pola dan urutan tertentu bersama-sama dengan kaki-kaki lainnya, dapat menggerakan dan memindahkan badan robot.
b) Hanya bagian dari kaki yang diperkenankan menempel di lantai ketika robot telah aktif dan ketika robot bergerak atau berjalan. Tidak ada bagian dari badan yang tidak masuk kedalam definisi kaki diperkenankan menempel di lantai misalnya penopang badan, caster dan sejenisnya.
c) Setiap kaki memiliki minimal dua derajat kebebasan dengan kata lain memiliki minimal dua sendi atau tegasnya setiap kaki memiliki minimal dua motor/aktuator.
d) Jumlah kaki minimal dua. e) Satu kaki adalah independen satu sama lainnya, artinya, tidak ada 2 kaki atau lebih yang
digerakan oleh satu motor/aktuator. f) Kaki tidak diperkenankan melakukan putaran 360 derajat (seperti prinsip roda berputar)
untuk memindahkan badan. g) Akan diberikan bonus khusus bagi yang membuat robot berkaki berjenis Humanoid (gerakan
kaki mirip prinsip manusia berjalan). Besarnya bonus dapat dilihat pada bagian Bonus. 2.3 Sound Activation
Sound Activation berfungsi sebagai remote kontrol pengaktivan robot melalui suara/bunyi-bunyian.

Panduan KRPAI 2013 – ver 10/17/2012 18
Peserta diharuskan membuat sendiri Sound Activation dengan ketentuan sebagai berikut. Frekuensi yang dikeluarkannya berada pada wilayah frekuensi suara terdengar berkisar di 3,5 KHz s.d. 4 KHz nominalnya 3.8 KHz. Suara yang dikeluarkan harus terdengar jelas dengan intensitas yang cukup keras. Pola bunyi-bunyian yang dikeluarkan harus sama saat start ataupun retry begitu juga sama dari satu sesi pertandingan ke sesi pertandingan lainnya. Bunyi-bunyian tersebut harus dihasilkan dari sumber suara yang bersifat elektronik. Bunyi-bunyian yang bukan bersifat elektronik (misalnya: tepuk tangan, siulan, genderang, bunyi mekanik dan sejenisnya) tidak diperkenankan dijadikan sebagai Sound Activation begitu juga Handphone atau alat yang mengeluarkan RF (Radio Frekuensi). Sound Activation hanya memiliki satu tombol aktivasi. Bila terdapat banyak tombol, yang penting hanya satu tombol aktivasi yang terlihat (yang lain harus tertutup dan tidak boleh ditekan). Bentuk dan ukuran Sound Activation bebas namun harus dapat digenggam. Sound Activation hanya memiliki satu output suara (speaker) yang terletak di satu sisi dari kotak alat. Tidak diperkenankan adanya speaker di dua sisi atau lebih dari kotak Sound Activation. Wasit akan memulai perhitungan waktu tepat saat tombol sound activation ditekan, bukan pada saat robot mulai bergerak. Suara hanya berbunyi selama 5 detik dan tidak akan diulang. Robot tidak boleh mulai bergerak sebelum sinyal suara dibunyikan. Jika robot bergerak karena suara suara lingkungan, maka sesi itu dianggap dimulai, tetapi sound activation dianggap gagal. Jika robot tidak bergerak setelah sound activation berbunyi selama 5 detik, maka tidak akan diulang, juri akan menekan tombol start manual, sedangkan waktu tetap berjalan. Microphone yang dipakai untuk mendengarkan suara sound activation, harus dipasang pada permukaan atas robot, menghadap ke atas, dan berlatarbelakang BIRU. 2.4 Tombol START Manual dan Tombol STOP
Peserta diminta untuk menyediakan SATU Tombol START manual dan SATU tombol STOP di permukaan atas badan robot. Tombol START manual adalah tombol untuk mengaktifkan robot secara manual, sedangkan tombol STOP adalah tombol untuk mematikan robot. Tombol START manual berfungsi untuk menggantikan Sound Activation ketika tidak berfungsi. Tombol-tombol ini harus diberi label dengan jelas. Tombol START dan STOP berlatar belakang HIJAU dan MERAH
Tombol START Tombol STOP Microphone Berlatar belakang hijau Berlatar belakang merah Berlatar belakang biru
Gambar 2. Tombol dan microphone
START STOP
Panduan KRPAI 2013 – ver 10/17/2012 19
2.5 Pemadam Api
Alat pemadaman api lilin yang diperbolehkan adalah Kipas dan/atau Extinguisher. a. Kipas
Kipas adalah alat pemadaman api menggunakan tiupan angin. Bentuk, ukuran dan bahannya adalah bebas.
b. Extinguisher Extinguisher adalah alat pemadaman api menggunakan cairan. Bentuk, ukuran dan bahannya adalah bebas, namun tidak boleh menggunakan cairan atau segala sesuatu yang dilarang sesuai dengan yang telah ditetapkan dalam panduan TCFFRC 2013.
3 LAPANGAN DAN KELENGKAPANNYA
3.1 Lapangan (Arena)
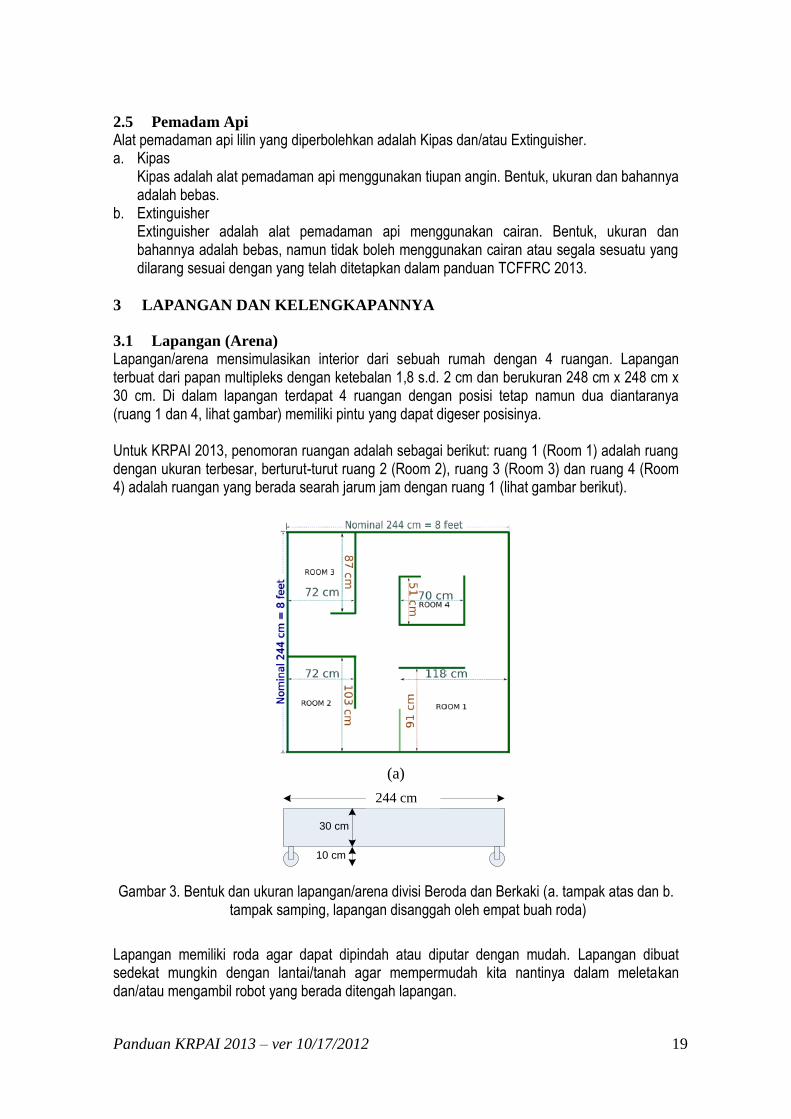
Lapangan/arena mensimulasikan interior dari sebuah rumah dengan 4 ruangan. Lapangan terbuat dari papan multipleks dengan ketebalan 1,8 s.d. 2 cm dan berukuran 248 cm x 248 cm x 30 cm. Di dalam lapangan terdapat 4 ruangan dengan posisi tetap namun dua diantaranya (ruang 1 dan 4, lihat gambar) memiliki pintu yang dapat digeser posisinya. Untuk KRPAI 2013, penomoran ruangan adalah sebagai berikut: ruang 1 (Room 1) adalah ruang dengan ukuran terbesar, berturut-turut ruang 2 (Room 2), ruang 3 (Room 3) dan ruang 4 (Room 4) adalah ruangan yang berada searah jarum jam dengan ruang 1 (lihat gambar berikut).
(a)
(b)
Gambar 3. Bentuk dan ukuran lapangan/arena divisi Beroda dan Berkaki (a. tampak atas dan b. tampak samping, lapangan disanggah oleh empat buah roda)
Lapangan memiliki roda agar dapat dipindah atau diputar dengan mudah. Lapangan dibuat sedekat mungkin dengan lantai/tanah agar mempermudah kita nantinya dalam meletakan dan/atau mengambil robot yang berada ditengah lapangan.
30 cm
248 cm
10 cm
244 cm
Panduan KRPAI 2013 – ver 10/17/2012 20
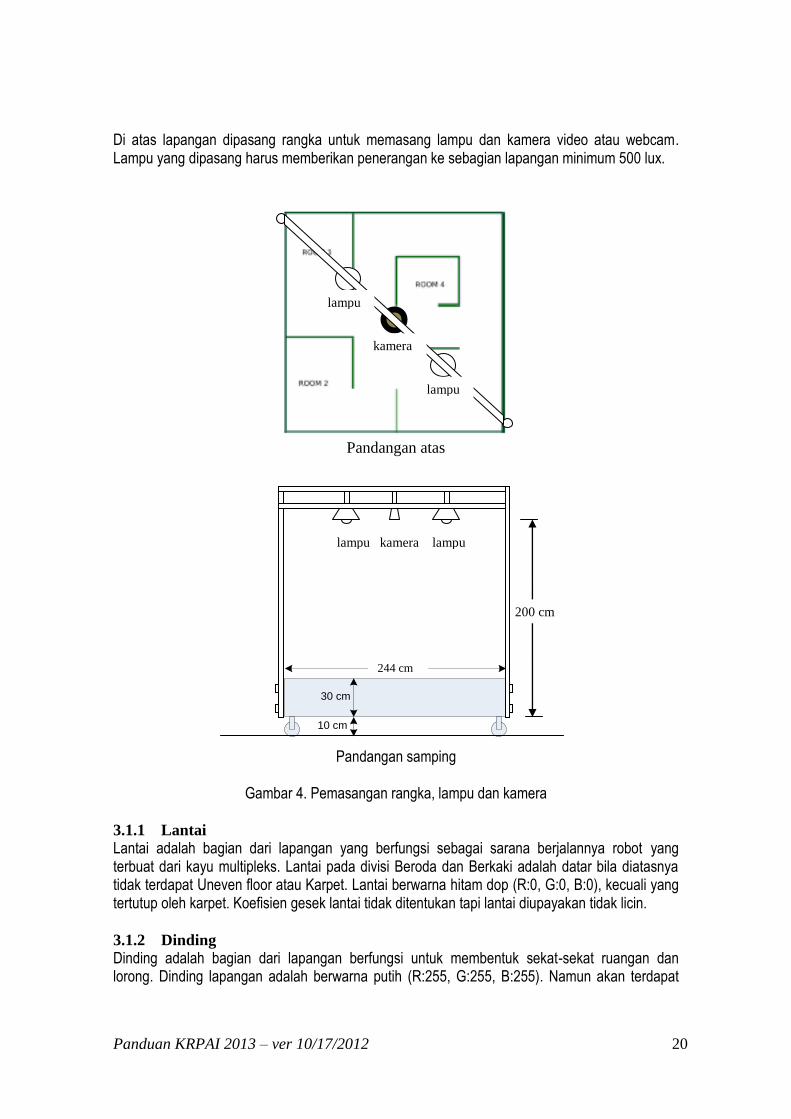
Di atas lapangan dipasang rangka untuk memasang lampu dan kamera video atau webcam. Lampu yang dipasang harus memberikan penerangan ke sebagian lapangan minimum 500 lux.
Pandangan atas
30 cm
248 cm
10 cm
Pandangan samping
Gambar 4. Pemasangan rangka, lampu dan kamera
3.1.1 Lantai
Lantai adalah bagian dari lapangan yang berfungsi sebagai sarana berjalannya robot yang terbuat dari kayu multipleks. Lantai pada divisi Beroda dan Berkaki adalah datar bila diatasnya tidak terdapat Uneven floor atau Karpet. Lantai berwarna hitam dop (R:0, G:0, B:0), kecuali yang tertutup oleh karpet. Koefisien gesek lantai tidak ditentukan tapi lantai diupayakan tidak licin. 3.1.2 Dinding
Dinding adalah bagian dari lapangan berfungsi untuk membentuk sekat-sekat ruangan dan lorong. Dinding lapangan adalah berwarna putih (R:255, G:255, B:255). Namun akan terdapat
kamera
lampu
lampu
244 cm
200 cm
lampu kamera lampu
Panduan KRPAI 2013 – ver 10/17/2012 21
“hanging objects” (sound damper dan cermin) yang akan membuat warna dinding menjadi tidak seluruhnya homogen. Tebal dinding sekitar 1,9 mm. 3.2 Pintu
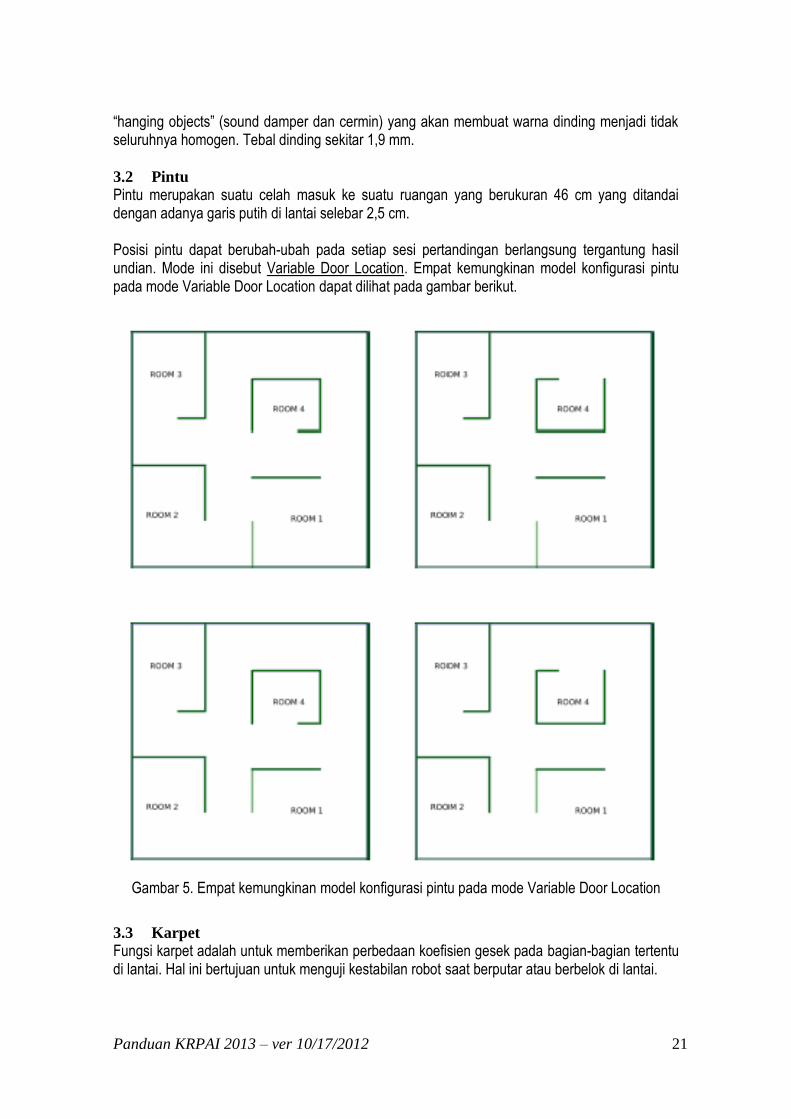
Pintu merupakan suatu celah masuk ke suatu ruangan yang berukuran 46 cm yang ditandai dengan adanya garis putih di lantai selebar 2,5 cm. Posisi pintu dapat berubah-ubah pada setiap sesi pertandingan berlangsung tergantung hasil undian. Mode ini disebut Variable Door Location. Empat kemungkinan model konfigurasi pintu pada mode Variable Door Location dapat dilihat pada gambar berikut.
Gambar 5. Empat kemungkinan model konfigurasi pintu pada mode Variable Door Location
3.3 Karpet
Fungsi karpet adalah untuk memberikan perbedaan koefisien gesek pada bagian-bagian tertentu di lantai. Hal ini bertujuan untuk menguji kestabilan robot saat berputar atau berbelok di lantai.
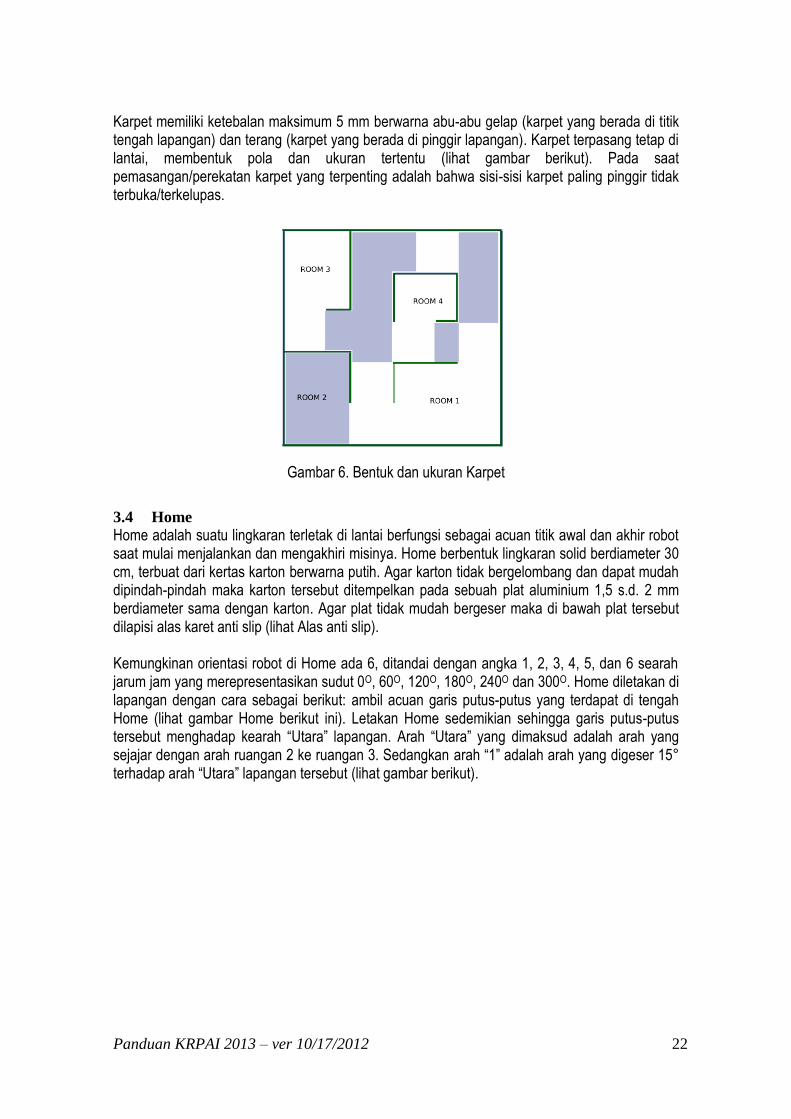
Panduan KRPAI 2013 – ver 10/17/2012 22
Karpet memiliki ketebalan maksimum 5 mm berwarna abu-abu gelap (karpet yang berada di titik tengah lapangan) dan terang (karpet yang berada di pinggir lapangan). Karpet terpasang tetap di lantai, membentuk pola dan ukuran tertentu (lihat gambar berikut). Pada saat pemasangan/perekatan karpet yang terpenting adalah bahwa sisi-sisi karpet paling pinggir tidak terbuka/terkelupas.
Gambar 6. Bentuk dan ukuran Karpet
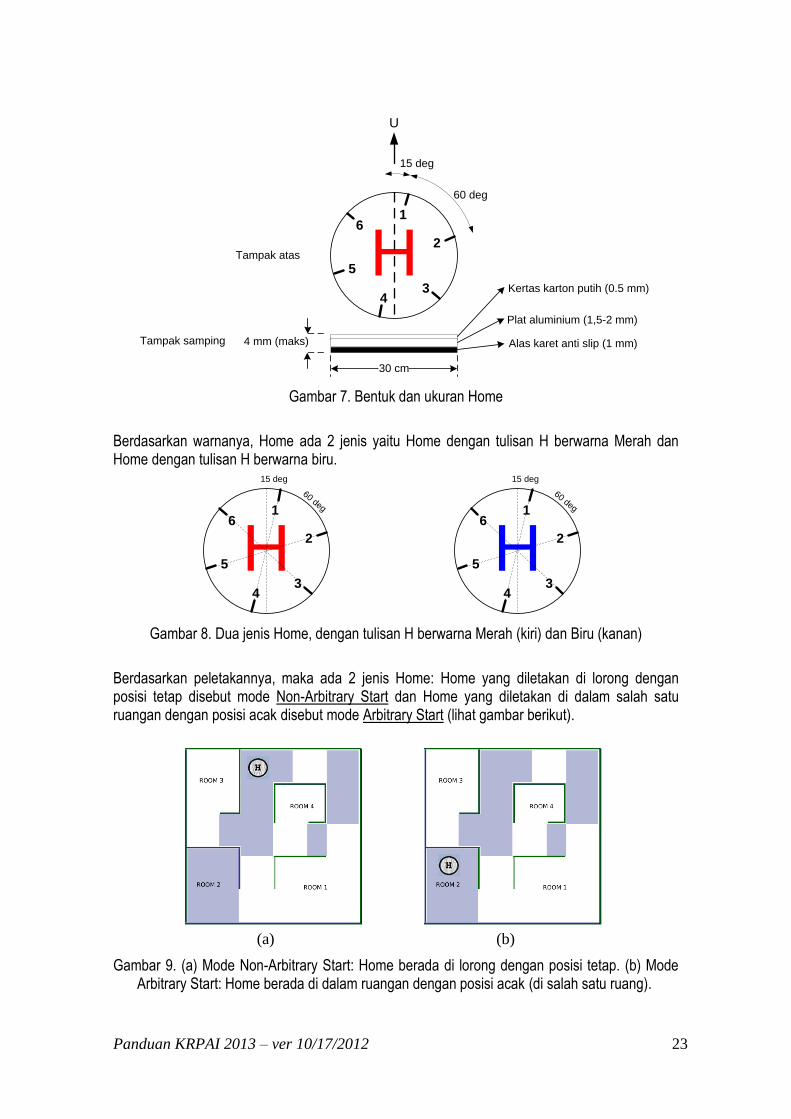
3.4 Home
Home adalah suatu lingkaran terletak di lantai berfungsi sebagai acuan titik awal dan akhir robot saat mulai menjalankan dan mengakhiri misinya. Home berbentuk lingkaran solid berdiameter 30 cm, terbuat dari kertas karton berwarna putih. Agar karton tidak bergelombang dan dapat mudah dipindah-pindah maka karton tersebut ditempelkan pada sebuah plat aluminium 1,5 s.d. 2 mm berdiameter sama dengan karton. Agar plat tidak mudah bergeser maka di bawah plat tersebut dilapisi alas karet anti slip (lihat Alas anti slip). Kemungkinan orientasi robot di Home ada 6, ditandai dengan angka 1, 2, 3, 4, 5, dan 6 searah jarum jam yang merepresentasikan sudut 0O, 60O, 120O, 180O, 240O dan 300O. Home diletakan di lapangan dengan cara sebagai berikut: ambil acuan garis putus-putus yang terdapat di tengah Home (lihat gambar Home berikut ini). Letakan Home sedemikian sehingga garis putus-putus tersebut menghadap kearah “Utara” lapangan. Arah “Utara” yang dimaksud adalah arah yang sejajar dengan arah ruangan 2 ke ruangan 3. Sedangkan arah “1” adalah arah yang digeser 15° terhadap arah “Utara” lapangan tersebut (lihat gambar berikut).
Panduan KRPAI 2013 – ver 10/17/2012 23
HTampak atas
Tampak samping
Kertas karton putih (0.5 mm)
Plat aluminium (1,5-2 mm)
Alas karet anti slip (1 mm)
1
2
34
5
6
30 cm
4 mm (maks)
U
15 deg
60 deg
Gambar 7. Bentuk dan ukuran Home
Berdasarkan warnanya, Home ada 2 jenis yaitu Home dengan tulisan H berwarna Merah dan Home dengan tulisan H berwarna biru.
H60 deg1
2
34
5
6
15 deg
H60 deg1
2
34
5
6
15 deg
Gambar 8. Dua jenis Home, dengan tulisan H berwarna Merah (kiri) dan Biru (kanan)
Berdasarkan peletakannya, maka ada 2 jenis Home: Home yang diletakan di lorong dengan posisi tetap disebut mode Non-Arbitrary Start dan Home yang diletakan di dalam salah satu ruangan dengan posisi acak disebut mode Arbitrary Start (lihat gambar berikut).
(a) (b)
Gambar 9. (a) Mode Non-Arbitrary Start: Home berada di lorong dengan posisi tetap. (b) Mode Arbitrary Start: Home berada di dalam ruangan dengan posisi acak (di salah satu ruang).
Panduan KRPAI 2013 – ver 10/17/2012 24
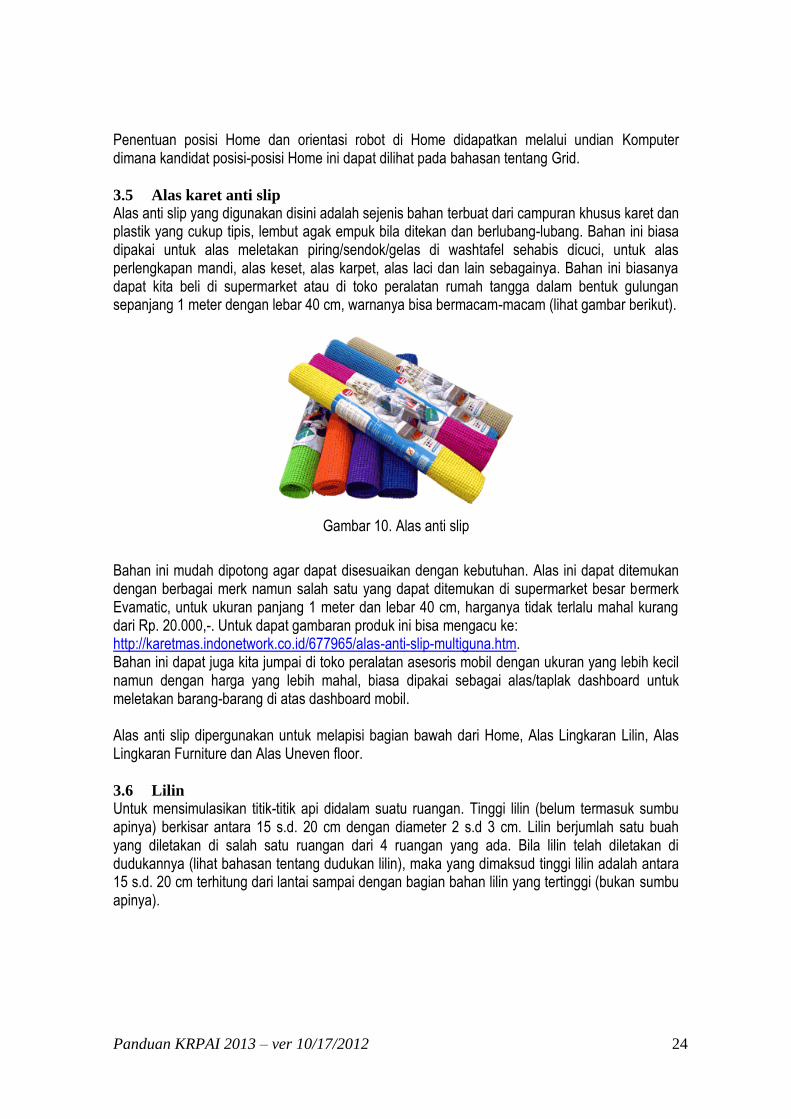
Penentuan posisi Home dan orientasi robot di Home didapatkan melalui undian Komputer dimana kandidat posisi-posisi Home ini dapat dilihat pada bahasan tentang Grid. 3.5 Alas karet anti slip
Alas anti slip yang digunakan disini adalah sejenis bahan terbuat dari campuran khusus karet dan plastik yang cukup tipis, lembut agak empuk bila ditekan dan berlubang-lubang. Bahan ini biasa dipakai untuk alas meletakan piring/sendok/gelas di washtafel sehabis dicuci, untuk alas perlengkapan mandi, alas keset, alas karpet, alas laci dan lain sebagainya. Bahan ini biasanya dapat kita beli di supermarket atau di toko peralatan rumah tangga dalam bentuk gulungan sepanjang 1 meter dengan lebar 40 cm, warnanya bisa bermacam-macam (lihat gambar berikut).
Gambar 10. Alas anti slip
Bahan ini mudah dipotong agar dapat disesuaikan dengan kebutuhan. Alas ini dapat ditemukan dengan berbagai merk namun salah satu yang dapat ditemukan di supermarket besar bermerk Evamatic, untuk ukuran panjang 1 meter dan lebar 40 cm, harganya tidak terlalu mahal kurang dari Rp. 20.000,-. Untuk dapat gambaran produk ini bisa mengacu ke: http://karetmas.indonetwork.co.id/677965/alas-anti-slip-multiguna.htm. Bahan ini dapat juga kita jumpai di toko peralatan asesoris mobil dengan ukuran yang lebih kecil namun dengan harga yang lebih mahal, biasa dipakai sebagai alas/taplak dashboard untuk meletakan barang-barang di atas dashboard mobil. Alas anti slip dipergunakan untuk melapisi bagian bawah dari Home, Alas Lingkaran Lilin, Alas Lingkaran Furniture dan Alas Uneven floor. 3.6 Lilin
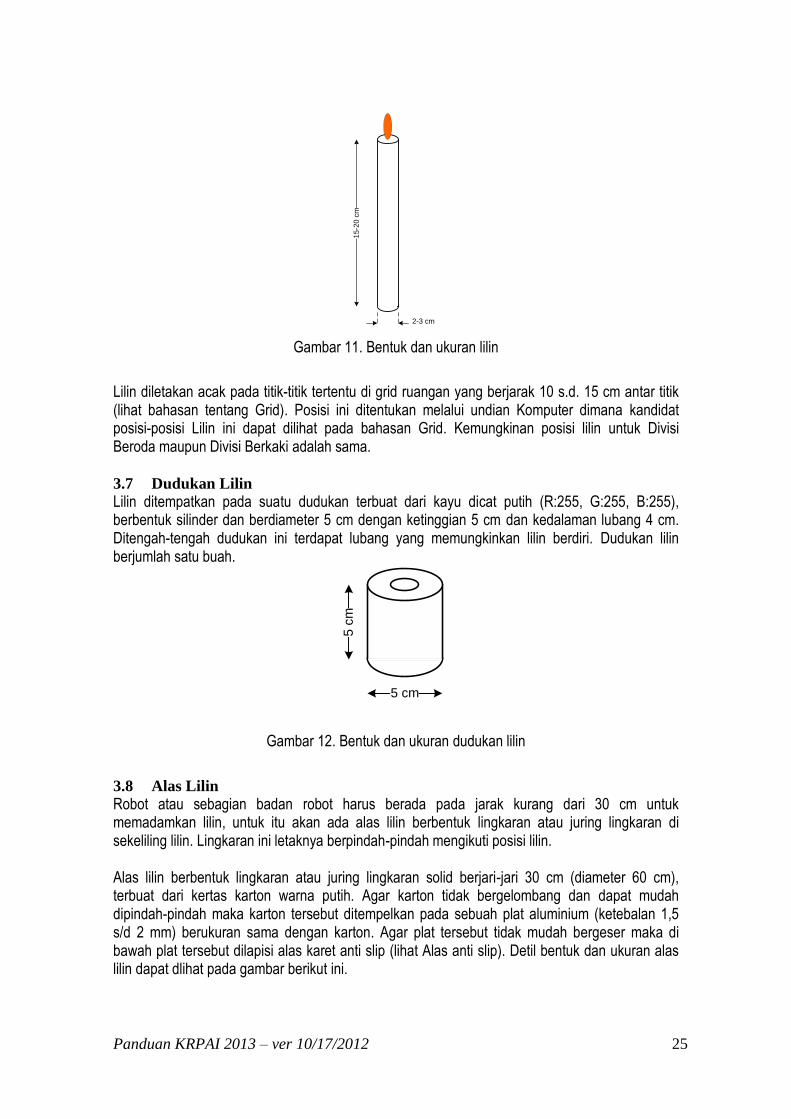
Untuk mensimulasikan titik-titik api didalam suatu ruangan. Tinggi lilin (belum termasuk sumbu apinya) berkisar antara 15 s.d. 20 cm dengan diameter 2 s.d 3 cm. Lilin berjumlah satu buah yang diletakan di salah satu ruangan dari 4 ruangan yang ada. Bila lilin telah diletakan di dudukannya (lihat bahasan tentang dudukan lilin), maka yang dimaksud tinggi lilin adalah antara 15 s.d. 20 cm terhitung dari lantai sampai dengan bagian bahan lilin yang tertinggi (bukan sumbu apinya).
Panduan KRPAI 2013 – ver 10/17/2012 25
15
-20
cm
2-3 cm
Gambar 11. Bentuk dan ukuran lilin
Lilin diletakan acak pada titik-titik tertentu di grid ruangan yang berjarak 10 s.d. 15 cm antar titik (lihat bahasan tentang Grid). Posisi ini ditentukan melalui undian Komputer dimana kandidat posisi-posisi Lilin ini dapat dilihat pada bahasan Grid. Kemungkinan posisi lilin untuk Divisi Beroda maupun Divisi Berkaki adalah sama. 3.7 Dudukan Lilin
Lilin ditempatkan pada suatu dudukan terbuat dari kayu dicat putih (R:255, G:255, B:255), berbentuk silinder dan berdiameter 5 cm dengan ketinggian 5 cm dan kedalaman lubang 4 cm. Ditengah-tengah dudukan ini terdapat lubang yang memungkinkan lilin berdiri. Dudukan lilin berjumlah satu buah.
5 c
m
5 cm
Gambar 12. Bentuk dan ukuran dudukan lilin
3.8 Alas Lilin
Robot atau sebagian badan robot harus berada pada jarak kurang dari 30 cm untuk memadamkan lilin, untuk itu akan ada alas lilin berbentuk lingkaran atau juring lingkaran di sekeliling lilin. Lingkaran ini letaknya berpindah-pindah mengikuti posisi lilin. Alas lilin berbentuk lingkaran atau juring lingkaran solid berjari-jari 30 cm (diameter 60 cm), terbuat dari kertas karton warna putih. Agar karton tidak bergelombang dan dapat mudah dipindah-pindah maka karton tersebut ditempelkan pada sebuah plat aluminium (ketebalan 1,5 s/d 2 mm) berukuran sama dengan karton. Agar plat tersebut tidak mudah bergeser maka di bawah plat tersebut dilapisi alas karet anti slip (lihat Alas anti slip). Detil bentuk dan ukuran alas lilin dapat dlihat pada gambar berikut ini.
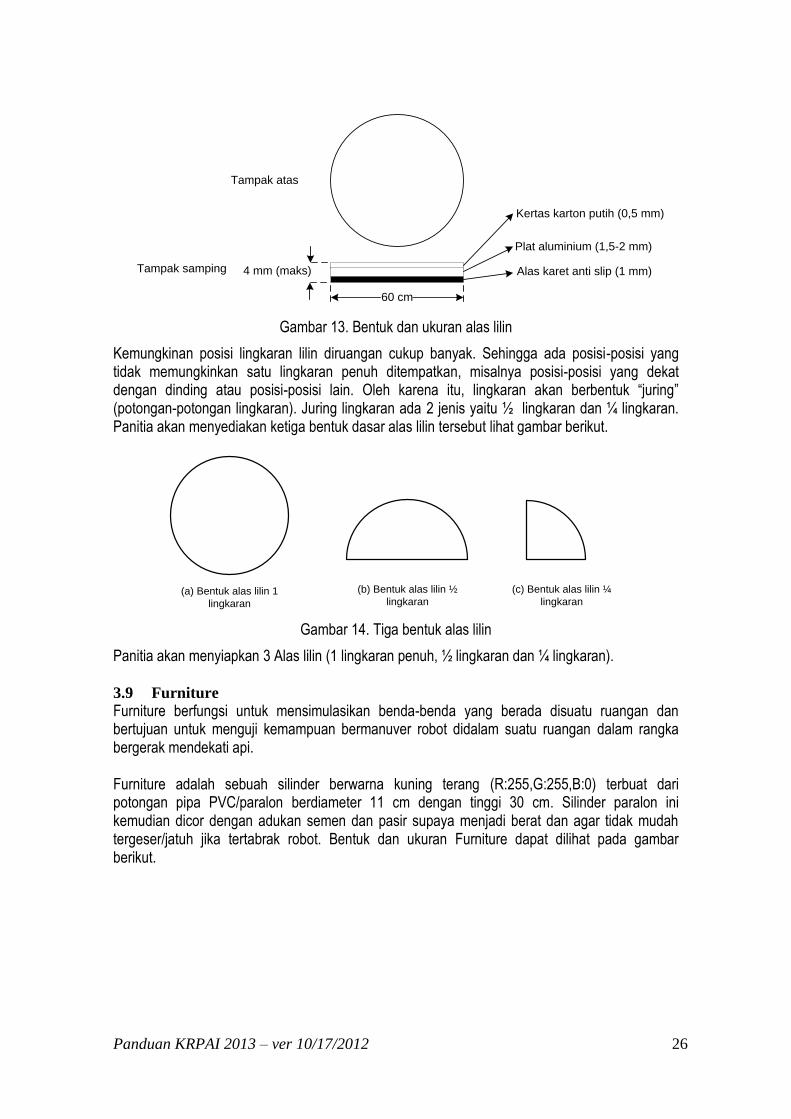
Panduan KRPAI 2013 – ver 10/17/2012 26
60 cm
Tampak atas
Tampak samping
Kertas karton putih (0,5 mm)
Plat aluminium (1,5-2 mm)
Alas karet anti slip (1 mm)4 mm (maks)
Gambar 13. Bentuk dan ukuran alas lilin
Kemungkinan posisi lingkaran lilin diruangan cukup banyak. Sehingga ada posisi-posisi yang tidak memungkinkan satu lingkaran penuh ditempatkan, misalnya posisi-posisi yang dekat dengan dinding atau posisi-posisi lain. Oleh karena itu, lingkaran akan berbentuk “juring” (potongan-potongan lingkaran). Juring lingkaran ada 2 jenis yaitu ½ lingkaran dan ¼ lingkaran. Panitia akan menyediakan ketiga bentuk dasar alas lilin tersebut lihat gambar berikut.
(c) Bentuk alas lilin ¼
lingkaran
(b) Bentuk alas lilin ½
lingkaran(a) Bentuk alas lilin 1
lingkaran
Gambar 14. Tiga bentuk alas lilin
Panitia akan menyiapkan 3 Alas lilin (1 lingkaran penuh, ½ lingkaran dan ¼ lingkaran). 3.9 Furniture
Furniture berfungsi untuk mensimulasikan benda-benda yang berada disuatu ruangan dan bertujuan untuk menguji kemampuan bermanuver robot didalam suatu ruangan dalam rangka bergerak mendekati api. Furniture adalah sebuah silinder berwarna kuning terang (R:255,G:255,B:0) terbuat dari potongan pipa PVC/paralon berdiameter 11 cm dengan tinggi 30 cm. Silinder paralon ini kemudian dicor dengan adukan semen dan pasir supaya menjadi berat dan agar tidak mudah tergeser/jatuh jika tertabrak robot. Bentuk dan ukuran Furniture dapat dilihat pada gambar berikut.
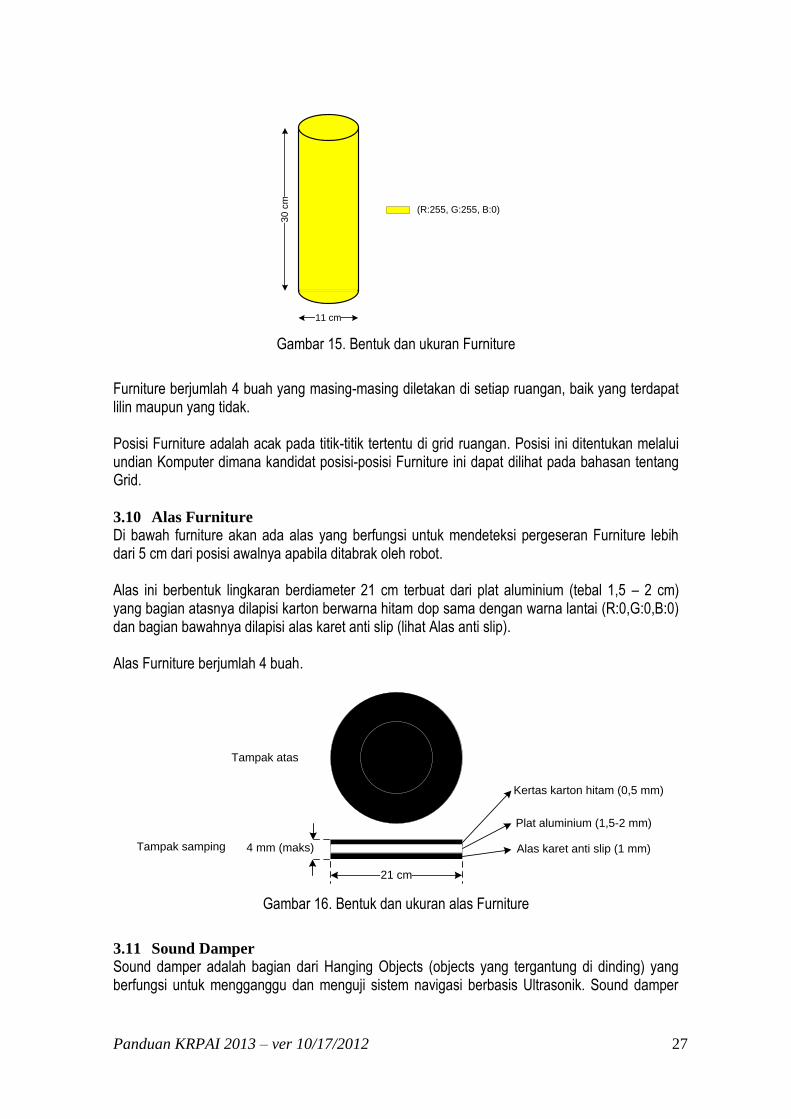
Panduan KRPAI 2013 – ver 10/17/2012 27
30
cm
11 cm
(R:255, G:255, B:0)
Gambar 15. Bentuk dan ukuran Furniture
Furniture berjumlah 4 buah yang masing-masing diletakan di setiap ruangan, baik yang terdapat lilin maupun yang tidak. Posisi Furniture adalah acak pada titik-titik tertentu di grid ruangan. Posisi ini ditentukan melalui undian Komputer dimana kandidat posisi-posisi Furniture ini dapat dilihat pada bahasan tentang Grid. 3.10 Alas Furniture
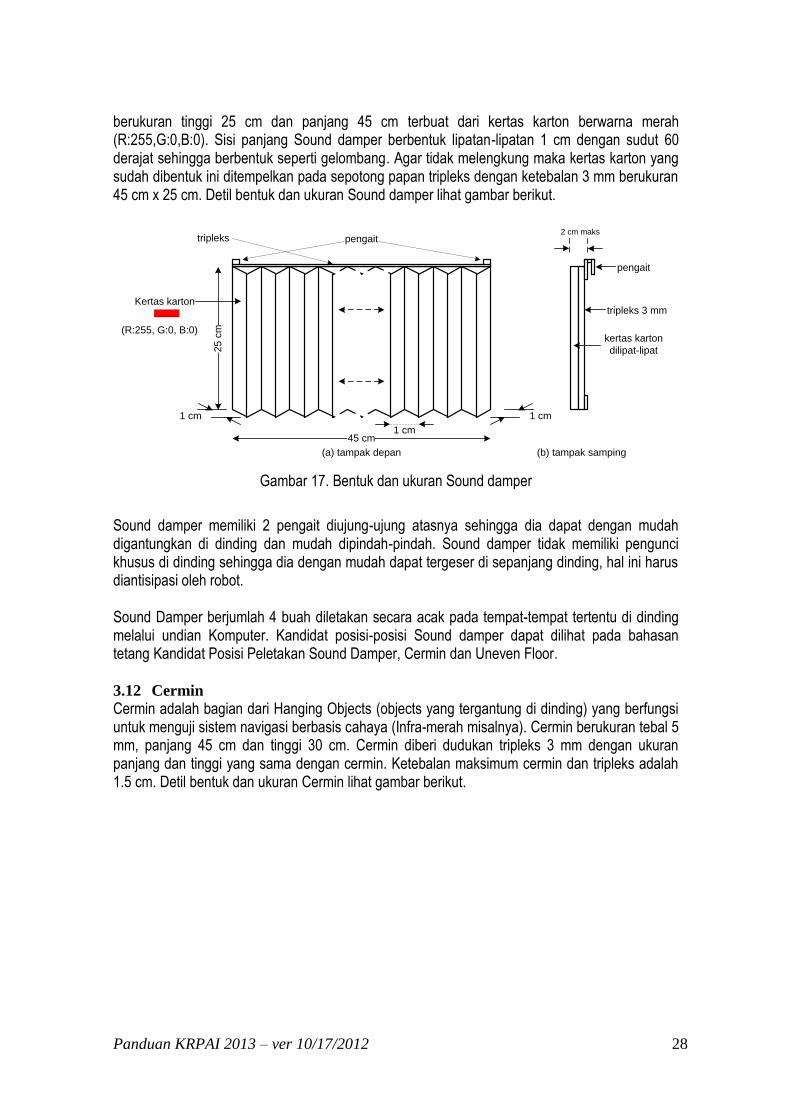
Di bawah furniture akan ada alas yang berfungsi untuk mendeteksi pergeseran Furniture lebih dari 5 cm dari posisi awalnya apabila ditabrak oleh robot. Alas ini berbentuk lingkaran berdiameter 21 cm terbuat dari plat aluminium (tebal 1,5 – 2 cm) yang bagian atasnya dilapisi karton berwarna hitam dop sama dengan warna lantai (R:0,G:0,B:0) dan bagian bawahnya dilapisi alas karet anti slip (lihat Alas anti slip). Alas Furniture berjumlah 4 buah.
Tampak atas
Tampak samping
Kertas karton hitam (0,5 mm)
Plat aluminium (1,5-2 mm)
Alas karet anti slip (1 mm)4 mm (maks)
21 cm
Gambar 16. Bentuk dan ukuran alas Furniture
3.11 Sound Damper
Sound damper adalah bagian dari Hanging Objects (objects yang tergantung di dinding) yang berfungsi untuk mengganggu dan menguji sistem navigasi berbasis Ultrasonik. Sound damper
Panduan KRPAI 2013 – ver 10/17/2012 28
berukuran tinggi 25 cm dan panjang 45 cm terbuat dari kertas karton berwarna merah (R:255,G:0,B:0). Sisi panjang Sound damper berbentuk lipatan-lipatan 1 cm dengan sudut 60 derajat sehingga berbentuk seperti gelombang. Agar tidak melengkung maka kertas karton yang sudah dibentuk ini ditempelkan pada sepotong papan tripleks dengan ketebalan 3 mm berukuran 45 cm x 25 cm. Detil bentuk dan ukuran Sound damper lihat gambar berikut.
45 cm
25
cm
2 cm maks
1 cm1 cm
1 cm
(R:255, G:0, B:0)
pengaittripleks
Kertas karton
kertas karton
dilipat-lipat
tripleks 3 mm
pengait
(a) tampak depan (b) tampak samping
Gambar 17. Bentuk dan ukuran Sound damper
Sound damper memiliki 2 pengait diujung-ujung atasnya sehingga dia dapat dengan mudah digantungkan di dinding dan mudah dipindah-pindah. Sound damper tidak memiliki pengunci khusus di dinding sehingga dia dengan mudah dapat tergeser di sepanjang dinding, hal ini harus diantisipasi oleh robot. Sound Damper berjumlah 4 buah diletakan secara acak pada tempat-tempat tertentu di dinding melalui undian Komputer. Kandidat posisi-posisi Sound damper dapat dilihat pada bahasan tetang Kandidat Posisi Peletakan Sound Damper, Cermin dan Uneven Floor. 3.12 Cermin
Cermin adalah bagian dari Hanging Objects (objects yang tergantung di dinding) yang berfungsi untuk menguji sistem navigasi berbasis cahaya (Infra-merah misalnya). Cermin berukuran tebal 5 mm, panjang 45 cm dan tinggi 30 cm. Cermin diberi dudukan tripleks 3 mm dengan ukuran panjang dan tinggi yang sama dengan cermin. Ketebalan maksimum cermin dan tripleks adalah 1.5 cm. Detil bentuk dan ukuran Cermin lihat gambar berikut.
Panduan KRPAI 2013 – ver 10/17/2012 29
(a) tampak depan (b) tampak samping
1.5 cm maks
cermin 5 mm
tripleks 3 mm
pengait
pengaittripleks
45 cm
25
cm
Gambar 18. Bentuk dan ukuran Cermin
Cermin memiliki 2 pengait diujung-ujungnya sehingga dia dapat dengan mudah digantungkan di dinding dan mudah dipindah-pindah. Cermin tidak memiliki pengunci khusus di dinding sehingga dia dengan mudah dapat bergeser di sepanjang dinding, hal ini harus diantisipasi oleh robot. Cermin berjumlah 4 buah diletakan secara acak pada tempat-tempat tertentu di dinding melalui undian Komputer. Kandidat posisi-posisi Cermin dapat dilihat pada bahasan tentang Kandidat Posisi Peletakan Sound Damper, Cermin dan Uneven Floor. 3.13 Uneven Floor
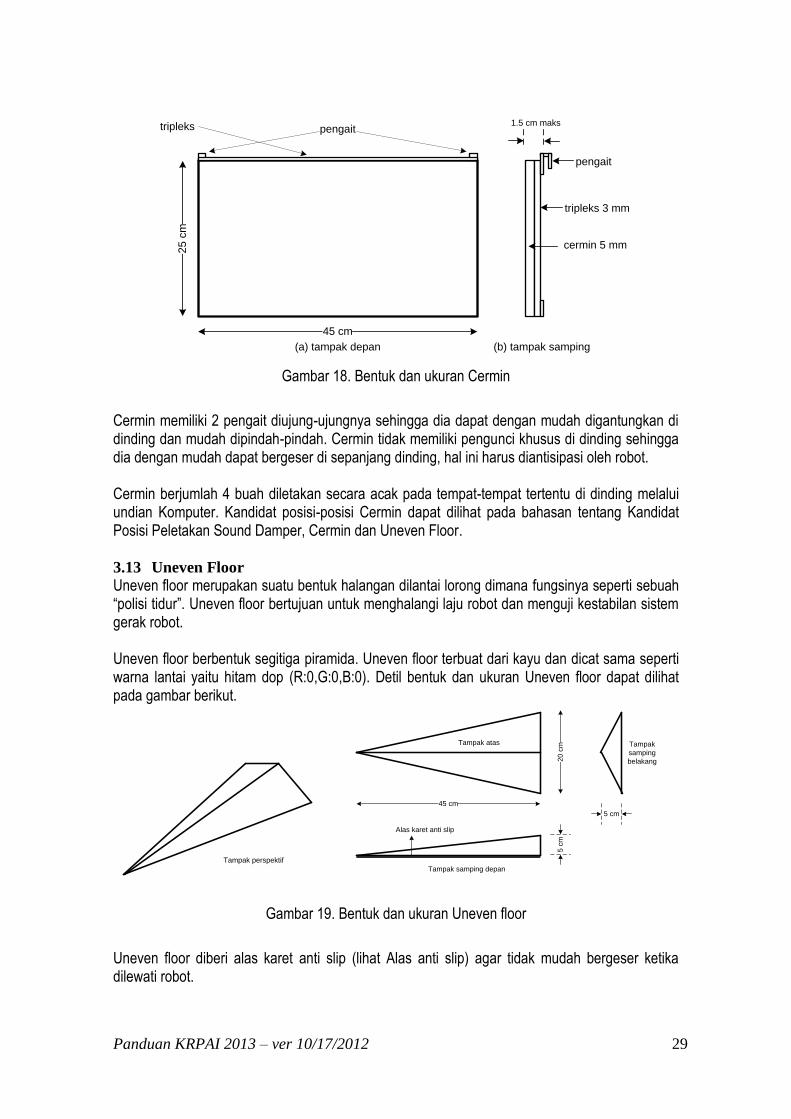
Uneven floor merupakan suatu bentuk halangan dilantai lorong dimana fungsinya seperti sebuah “polisi tidur”. Uneven floor bertujuan untuk menghalangi laju robot dan menguji kestabilan sistem gerak robot. Uneven floor berbentuk segitiga piramida. Uneven floor terbuat dari kayu dan dicat sama seperti warna lantai yaitu hitam dop (R:0,G:0,B:0). Detil bentuk dan ukuran Uneven floor dapat dilihat pada gambar berikut.
Tampak perspektif
20
cm
45 cm
5 cm
5 c
m
Tampak samping depan
Tampak
samping
belakang
Tampak atas
Alas karet anti slip
Gambar 19. Bentuk dan ukuran Uneven floor
Uneven floor diberi alas karet anti slip (lihat Alas anti slip) agar tidak mudah bergeser ketika dilewati robot.
Panduan KRPAI 2013 – ver 10/17/2012 30
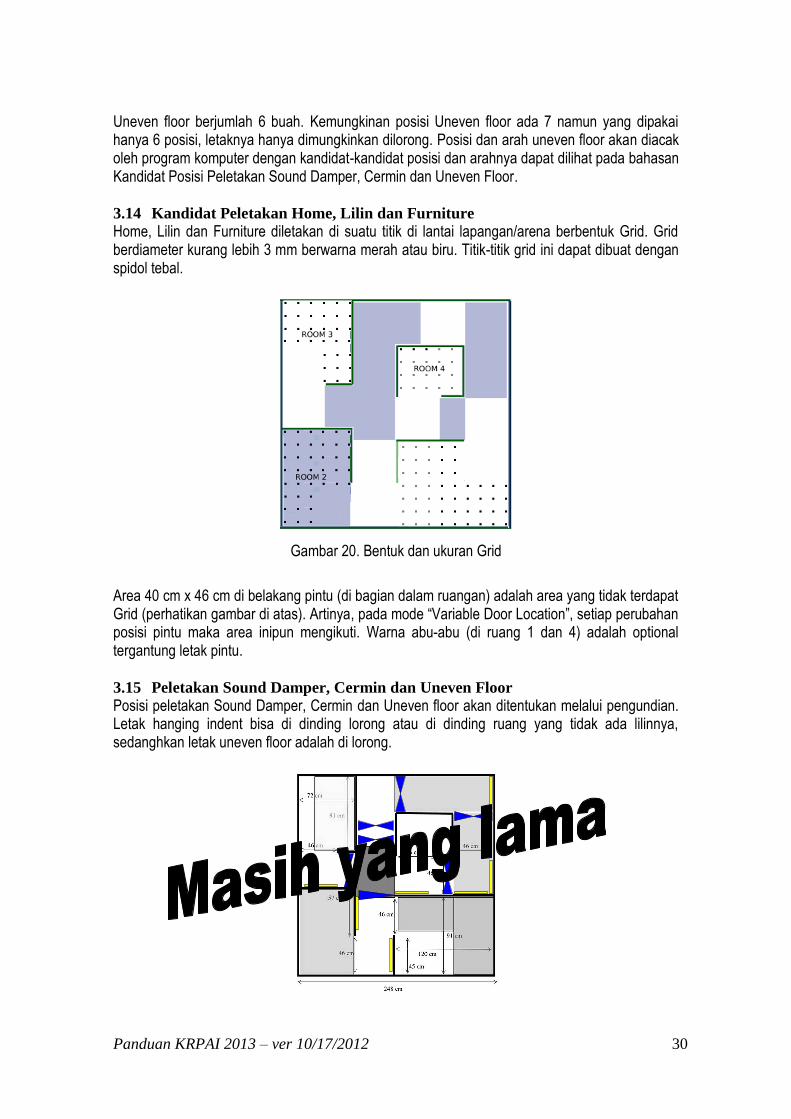
Uneven floor berjumlah 6 buah. Kemungkinan posisi Uneven floor ada 7 namun yang dipakai hanya 6 posisi, letaknya hanya dimungkinkan dilorong. Posisi dan arah uneven floor akan diacak oleh program komputer dengan kandidat-kandidat posisi dan arahnya dapat dilihat pada bahasan Kandidat Posisi Peletakan Sound Damper, Cermin dan Uneven Floor. 3.14 Kandidat Peletakan Home, Lilin dan Furniture
Home, Lilin dan Furniture diletakan di suatu titik di lantai lapangan/arena berbentuk Grid. Grid berdiameter kurang lebih 3 mm berwarna merah atau biru. Titik-titik grid ini dapat dibuat dengan spidol tebal.
Gambar 20. Bentuk dan ukuran Grid
Area 40 cm x 46 cm di belakang pintu (di bagian dalam ruangan) adalah area yang tidak terdapat Grid (perhatikan gambar di atas). Artinya, pada mode “Variable Door Location”, setiap perubahan posisi pintu maka area inipun mengikuti. Warna abu-abu (di ruang 1 dan 4) adalah optional tergantung letak pintu. 3.15 Peletakan Sound Damper, Cermin dan Uneven Floor
Posisi peletakan Sound Damper, Cermin dan Uneven floor akan ditentukan melalui pengundian. Letak hanging indent bisa di dinding lorong atau di dinding ruang yang tidak ada lilinnya, sedanghkan letak uneven floor adalah di lorong.
Panduan KRPAI 2013 – ver 10/17/2012 31
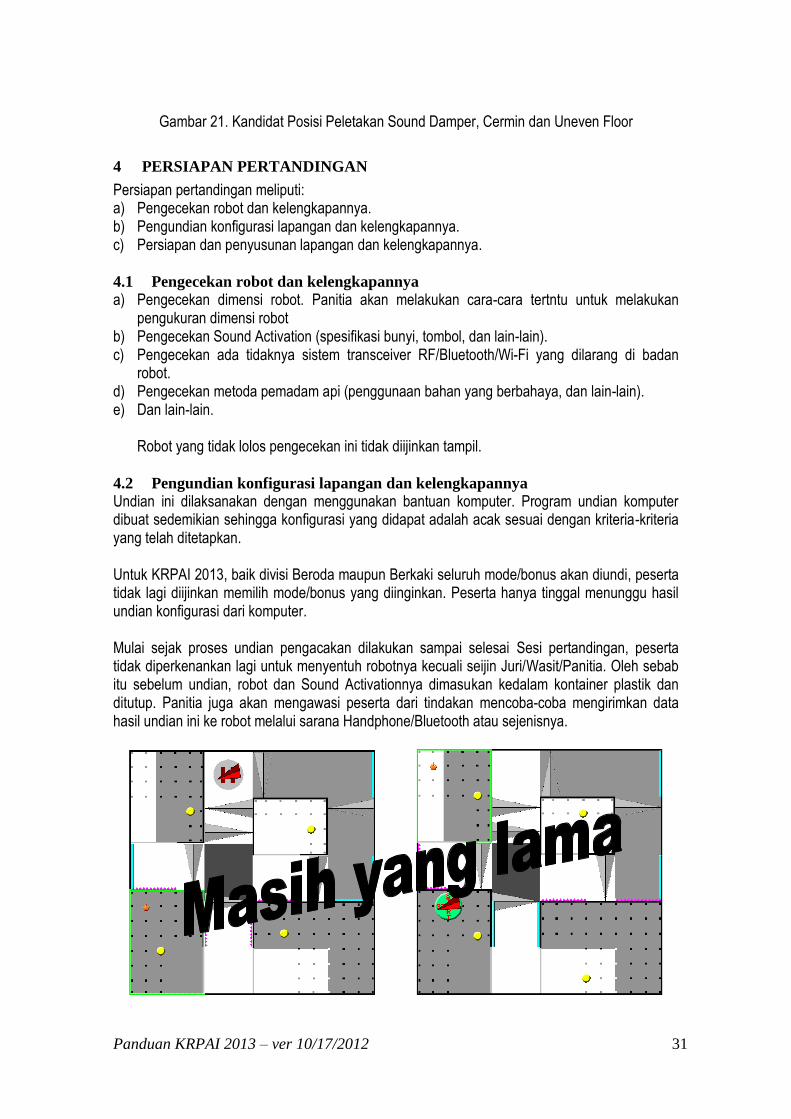
Gambar 21. Kandidat Posisi Peletakan Sound Damper, Cermin dan Uneven Floor
4 PERSIAPAN PERTANDINGAN
Persiapan pertandingan meliputi: a) Pengecekan robot dan kelengkapannya. b) Pengundian konfigurasi lapangan dan kelengkapannya. c) Persiapan dan penyusunan lapangan dan kelengkapannya. 4.1 Pengecekan robot dan kelengkapannya
a) Pengecekan dimensi robot. Panitia akan melakukan cara-cara tertntu untuk melakukan pengukuran dimensi robot
b) Pengecekan Sound Activation (spesifikasi bunyi, tombol, dan lain-lain). c) Pengecekan ada tidaknya sistem transceiver RF/Bluetooth/Wi-Fi yang dilarang di badan
robot. d) Pengecekan metoda pemadam api (penggunaan bahan yang berbahaya, dan lain-lain). e) Dan lain-lain.
Robot yang tidak lolos pengecekan ini tidak diijinkan tampil.
4.2 Pengundian konfigurasi lapangan dan kelengkapannya
Undian ini dilaksanakan dengan menggunakan bantuan komputer. Program undian komputer dibuat sedemikian sehingga konfigurasi yang didapat adalah acak sesuai dengan kriteria-kriteria yang telah ditetapkan. Untuk KRPAI 2013, baik divisi Beroda maupun Berkaki seluruh mode/bonus akan diundi, peserta tidak lagi diijinkan memilih mode/bonus yang diinginkan. Peserta hanya tinggal menunggu hasil undian konfigurasi dari komputer. Mulai sejak proses undian pengacakan dilakukan sampai selesai Sesi pertandingan, peserta tidak diperkenankan lagi untuk menyentuh robotnya kecuali seijin Juri/Wasit/Panitia. Oleh sebab itu sebelum undian, robot dan Sound Activationnya dimasukan kedalam kontainer plastik dan ditutup. Panitia juga akan mengawasi peserta dari tindakan mencoba-coba mengirimkan data hasil undian ini ke robot melalui sarana Handphone/Bluetooth atau sejenisnya.
Panduan KRPAI 2013 – ver 10/17/2012 32
(a) (b)
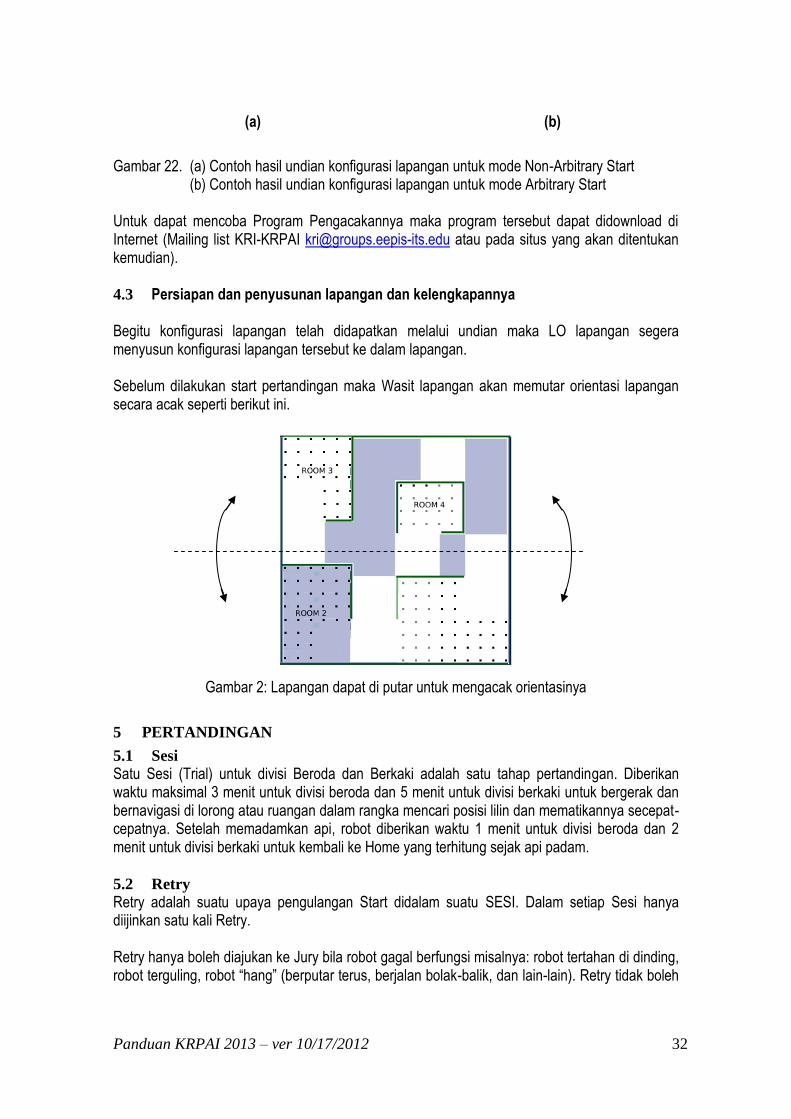
Gambar 22. (a) Contoh hasil undian konfigurasi lapangan untuk mode Non-Arbitrary Start (b) Contoh hasil undian konfigurasi lapangan untuk mode Arbitrary Start
Untuk dapat mencoba Program Pengacakannya maka program tersebut dapat didownload di Internet (Mailing list KRI-KRPAI [email protected] atau pada situs yang akan ditentukan kemudian). 4.3 Persiapan dan penyusunan lapangan dan kelengkapannya
Begitu konfigurasi lapangan telah didapatkan melalui undian maka LO lapangan segera menyusun konfigurasi lapangan tersebut ke dalam lapangan. Sebelum dilakukan start pertandingan maka Wasit lapangan akan memutar orientasi lapangan secara acak seperti berikut ini.
Gambar 2: Lapangan dapat di putar untuk mengacak orientasinya
5 PERTANDINGAN
5.1 Sesi
Satu Sesi (Trial) untuk divisi Beroda dan Berkaki adalah satu tahap pertandingan. Diberikan waktu maksimal 3 menit untuk divisi beroda dan 5 menit untuk divisi berkaki untuk bergerak dan bernavigasi di lorong atau ruangan dalam rangka mencari posisi lilin dan mematikannya secepat-cepatnya. Setelah memadamkan api, robot diberikan waktu 1 menit untuk divisi beroda dan 2 menit untuk divisi berkaki untuk kembali ke Home yang terhitung sejak api padam. 5.2 Retry
Retry adalah suatu upaya pengulangan Start didalam suatu SESI. Dalam setiap Sesi hanya diijinkan satu kali Retry. Retry hanya boleh diajukan ke Jury bila robot gagal berfungsi misalnya: robot tertahan di dinding, robot terguling, robot “hang” (berputar terus, berjalan bolak-balik, dan lain-lain). Retry tidak boleh
Panduan KRPAI 2013 – ver 10/17/2012 33
diajukan pada kondisi robot salah jalan atau pada kondisi tidak berhasilnya robot memadamkan api. Ketika Retry diajukan, peserta wajib menunggu ijin/keputusan Jury. Bila Retry diijinkan maka robot akan dibawa kembali ke Home tetapi stopwatch tidak dihentikan. Saat Retry peserta tidak diperkenankan menyentuh robotnya kecuali seijin Juri. Aktivasi robot saat Retry dilakukan oleh juri. 5.3 Pass
Pass adalah upaya pemberhentian Sesi oleh peserta. Pass dapat diajukan kapan saja. Pass bertujuan: a) Menyelamatkan robot dari kerusakan. b) Menghemat waktu pertandingan. c) Menjadi strategi peserta.
5.4 Penghentian Sesi
Sesi dihentikan bila :
Robot telah menyelesaikan misi dan kembali ke Home.
Tim pass.
Robot tidak bergerak selama 30 detik, dan hak retry telah digunakan.
Robot gagal padamkan api dalam waktu yang ditentukan.
Juri lapangan menghendakinya dikarenakan adanya situasi penting dan mendesak.
6 PENILAIAN
Secara sederhana penilaian adalah sebagai berikut. Nilai Waktu, Nilai Bonus dan Nilai Penalti dihitung begitu sesi pertandingan berakhir. Waktu yang didapat akan dikurangi dengan Penalti kemudian dikalikan dengan Bonus yang diperoleh untuk memperoleh Nilai Waktu. 6.1 Nilai Bonus
Mendapat Bonus berarti mendapat pengurangan nilai Waktu yang berarti memperbaiki perolehan Nilai Waktu Actual. Hal ini dikarenakan Nilai Waktu Actual yang didapat akan dikalikan dengan Nilai Bonus yang lebih kecil daripada satu (0<Nilai Bonus<1). Bonus hanya akan didapatkan bila robot berhasil menjalani mode operasi tersebut. Peserta tidak memilih Mode operasi yang diinginkan. Mode operasi ditetapkan dari hasil undian. Seluruh Mode operasi yang ada akan diundi. Berikut adalah Tabel Mode operasi dan nilai bonusnya.
Tabel 1: Rekapitulasi Nilai Bonus
No Mode Bonus Keterangan
1 Sound Activation 0.95 Pilihan
2 Extinguisher 0.75 Pilihan
3 Two Legged (khusus 0.60 Pilihan
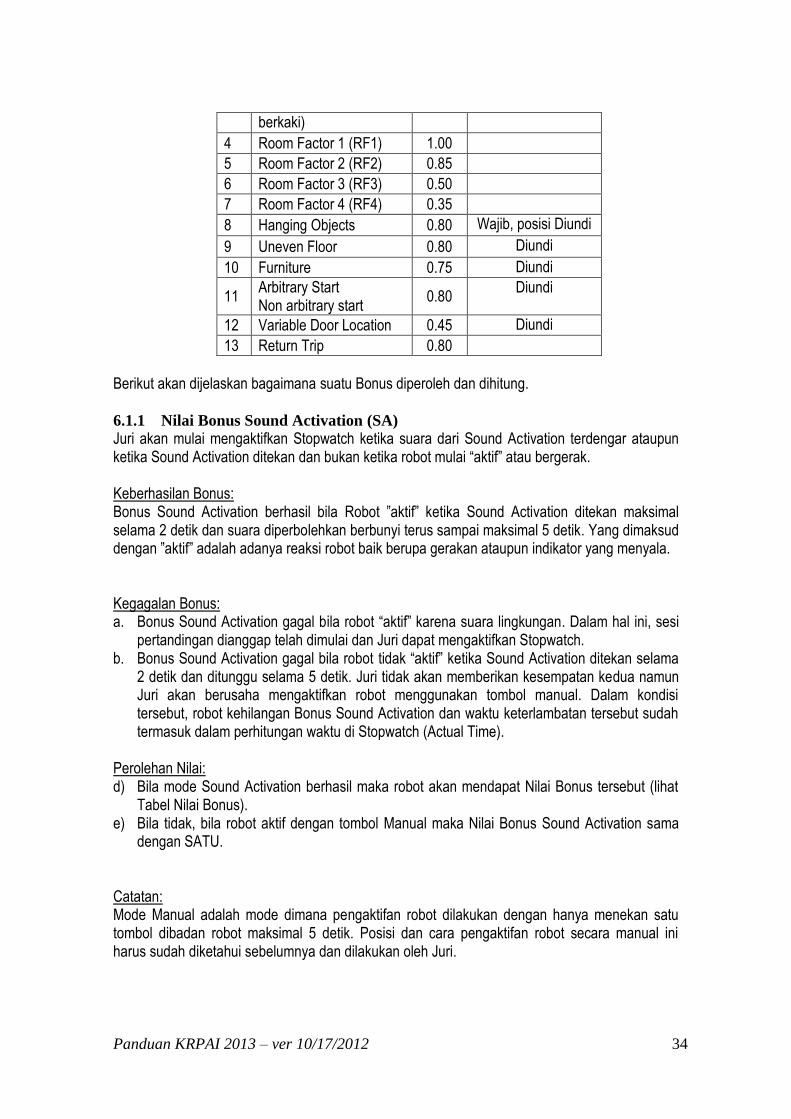
Panduan KRPAI 2013 – ver 10/17/2012 34
berkaki)
4 Room Factor 1 (RF1) 1.00
5 Room Factor 2 (RF2) 0.85
6 Room Factor 3 (RF3) 0.50
7 Room Factor 4 (RF4) 0.35
8 Hanging Objects 0.80 Wajib, posisi Diundi
9 Uneven Floor 0.80 Diundi
10 Furniture 0.75 Diundi
11 Arbitrary Start Non arbitrary start
0.80 Diundi
12 Variable Door Location 0.45 Diundi
13 Return Trip 0.80
Berikut akan dijelaskan bagaimana suatu Bonus diperoleh dan dihitung. 6.1.1 Nilai Bonus Sound Activation (SA)
Juri akan mulai mengaktifkan Stopwatch ketika suara dari Sound Activation terdengar ataupun ketika Sound Activation ditekan dan bukan ketika robot mulai “aktif” atau bergerak. Keberhasilan Bonus: Bonus Sound Activation berhasil bila Robot ”aktif” ketika Sound Activation ditekan maksimal selama 2 detik dan suara diperbolehkan berbunyi terus sampai maksimal 5 detik. Yang dimaksud dengan ”aktif” adalah adanya reaksi robot baik berupa gerakan ataupun indikator yang menyala. Kegagalan Bonus: a. Bonus Sound Activation gagal bila robot “aktif” karena suara lingkungan. Dalam hal ini, sesi
pertandingan dianggap telah dimulai dan Juri dapat mengaktifkan Stopwatch. b. Bonus Sound Activation gagal bila robot tidak “aktif” ketika Sound Activation ditekan selama
2 detik dan ditunggu selama 5 detik. Juri tidak akan memberikan kesempatan kedua namun Juri akan berusaha mengaktifkan robot menggunakan tombol manual. Dalam kondisi tersebut, robot kehilangan Bonus Sound Activation dan waktu keterlambatan tersebut sudah termasuk dalam perhitungan waktu di Stopwatch (Actual Time).
Perolehan Nilai: d) Bila mode Sound Activation berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat
Tabel Nilai Bonus). e) Bila tidak, bila robot aktif dengan tombol Manual maka Nilai Bonus Sound Activation sama
dengan SATU. Catatan: Mode Manual adalah mode dimana pengaktifan robot dilakukan dengan hanya menekan satu tombol dibadan robot maksimal 5 detik. Posisi dan cara pengaktifan robot secara manual ini harus sudah diketahui sebelumnya dan dilakukan oleh Juri.
Panduan KRPAI 2013 – ver 10/17/2012 35
6.1.2 Nilai Bonus Extinguisher (E)
Keberhasilan Bonus: Bila api berhasil dipadamkan dengan cairan (lihat bahasan tentang Extinguisher). Kegagalan Bonus: a. Bila lilin gagal dipadamkan dengan cairan. b. Bila lilin dipadamkan bukan dengan cairan (misalnya Kipas). c. Bila lilin dipadamkan oleh cairan dan Kipas secara bersamaan. Perolehan Nilai: a. Bila mode Extinguisher berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat Tabel
Nilai Bonus). b. Bila tidak, maka Nilai Bonus tersebut sama dengan SATU. Diskualifikasi: Menggunakan cairan dan segala sesuatu yang dilarang sesuai dengan panduan Internasional TCFFRC 2013. 6.1.3 Nilai Bonus Hanging Objects (HO)
Keberhasilan Bonus: Bila tidak satupun dari Hanging Objects (Sound Damper dan Cermin) tersentuh oleh robot. Kegagalan Bonus: a. Jika salah satu dari Hanging Objects tersentuh oleh robot. b. Jika salah satu dari Hanging Objects dirusakan/dipecahkan oleh robot. Kegagalan Sesi: Jika lebih dari satu Hanging Objects dirusakan/dipecahkan oleh robot. Perolehan Nilai: a. Bila mode Hanging Objects berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat
Tabel Nilai Bonus). b. Bila tidak maka Nilai Bonus tersebut sama dengan SATU. Catatan: Perhitungan nilai bonus ini hanya berlaku sebelum api dipadamkan. 6.1.4 Nilai Bonus Furniture (F)
Keberhasilan Bonus: a) Bila tidak ada satupun Furniture yang didorong lebih dari 5 cm dari alas Furniture. b) Bila tidak ada satupun Furniture yang dijatuhkan. Kegagalan Bonus: a. Bila salah satu dari Furniture didorong lebih dari 5 cm dari lingkaran Furniture. b. Bila salah satu dari Furniture dijatuhkan. Perolehan Nilai:
Panduan KRPAI 2013 – ver 10/17/2012 36
a. Bila mode Furniture berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat Tabel Nilai Bonus).
b. Bila tidak maka Nilai Bonus tersebut sama dengan SATU. Catatan: Perhitungan nilai bonus ini hanya berlaku sebelum api dipadamkan. 6.1.5 Nilai Bonus Uneven Floor (UF)
Keberhasilan Bonus: Bila tidak sekalipun robot menyentuh dinding saat robot melewati seluruh Uneven floor yang ada. Kegagalan Bonus: Bila robot menyentuh dinding saat melewati salah satu Uneven floor. Perolehan Nilai: f) Bila mode Uneven floor berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat Tabel
Nilai Bonus). g) Bila tidak maka Nilai Bonus tersebut sama dengan SATU. Catatan: Perhitungan nilai bonus ini hanya berlaku sebelum api dipadamkan. 6.1.6 Nilai Bonus Return Trip (RT)
Mode Return Trip adalah mode dimana robot kembali lagi ke Home setelah sukses padamkan api. Keberhasilan Bonus: a. Bila robot berhasil kembali ke titik start (Home) sebelum 2 menit setelah padamkan api
(mode Non-arbitrary Start). b. Bila robot kembali ke ruang yang ada Home-nya, ruang dimana dia berangkat sebelumnya
dan seluruh badan robot sudah masuk ke dalam ruangan tersebut (mode Arbitrary Start). Kegagalan Bonus: a. Bila lebih dari 2 menit, robot tidak berhasil kembali ke Home. b. Bila badan robot tidak masuk seluruhnya ke dalam ruangan tempat dia start (mode Arbitrary
Start). Perolehan Nilai: a) Bila mode Return Trip berhasil maka robot akan mendapat Nilai Bonus tersebut (lihat Tabel
Nilai Bonus). b) Bila tidak maka Nilai Bonus tersebut sama dengan SATU. 6.1.7 Nilai Bonus Room Factor (RF)
Room Factor adalah Bonus yang diperoleh ketika robot memasuki ruangan kosong dan berhasil mendeteksi bahwa di ruangan tersebut tidak ada titik api dengan catatan bahwa robot sukses memadamkan api di ruangan lainnya. Bila robot dalam status tidak berhasil memadamkan api maka bonus Room Factor tidak didapatkan.
Panduan KRPAI 2013 – ver 10/17/2012 37
Untuk mode Non-Arbitrary Start: Nilai RF1 = 1.00 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan pertama yang dimasuki. Nilai RF2 = 0.85 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan kedua yang dimasuki dan satu ruangan sebelumnya berhasil ”dijelajahi”. Nilai RF3 = 0.50 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan ketiga yang dimasuki dan dua ruangan sebelumnya berhasil ”dijelajahi”. Nilai RF4 = 0.35 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan keempat yang dimasuki dan tiga ruangan sebelumnya berhasil ”dijelajahi”. Untuk mode Arbitrary Start: Nilai RF2 = 0.85 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan pertama yang dimasuki dan satu ruangan sebelumnya berhasil ”dijelajahi” (ruangan Start). Nilai RF3 = 0.50 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan ketiga dan dua ruangan sebelumnya berhasil ”dijelajahi” (ruangan Start dan satu ruangan kosong). Nilai RF4 = 0.35 diberikan jika lilin berhasil ditemukan dan dipadamkan di ruangan keempat dan tiga ruangan sebelumnya berhasil ”dijelajahi” (ruangan Start dan dua ruangan kosong). Definisi ruang telah berhasil ”dijelajahi” adalah ruangan yang telah dimasuki minimal oleh setengah badan robot. Jika robot telah memasuki suatu ruangan yang di dalamnya terdapat lilin yang menyala, robot harus segera memadamkan lilin tersebut. Bila robot keluar ruangan tersebut dan memasuki ruangan lain maka ruangan yang dianggap telah dijelajahi adalah ruangan sebelum robot memasuki ruangan yang ada apinya tersebut. 6.2 Nilai Waktu Actual Time (AT)
Nilai waktu Actual Time (AT) adalah waktu yang dibutuhkan robot untuk berjalan dari Home hingga memadamkan api lilin dalam satuan detik. 6.3 Nilai Penalti (PP)
Penalty Points (PP) adalah nilai yang didapatkan bila robot melakukan pelanggaran. Ada dua hal yang menyebabkan Penalti, berikut ini diberikan nilainya: 1. Jika robot menyentuh/menggeser dinding maka Nilai Penalti adalah 1 point atau 1 detik per 2
cm. 2. Jika robot menyentuh lilin yang masih menyala atau tempatnya maka Nilai Penalti adalah 50
detik setiap kali menyentuh. 6.4 Nilai Time Score (TS)
Nilai Time Score adalah nilai penjumlahan antara Actual Time (AT) dan Penalty Points (PP):
TS = AT + PP 6.5 Nilai Mode Factor (MF)
Mode Factor (MF) adalah nilai yang didapat dari hasil perkalian seluruh Bonus Operating Mode (OM) yang didapat. OM terdiri dari Sound Activation (SA), Extinguisher (E), Two Legged (TL), Furniture (F), Hanging Objects (HO), Uneven Floor (UF), Arbitrary Start (AS), Variable Door Location (VDL) dan Return Trip (RT). Contoh Nilai Mode Factor Divisi Beroda jika seluruh Bonus berhasil:
Panduan KRPAI 2013 – ver 10/17/2012 38
MF = SA x E x F x HO x UF x AS x VDL x RT MF = 0.95 x 0.75 x 0.75 x 0.80 x 0.80 x 0.80 x 0.45 x 0.80 MF = 0.098496 Contoh Nilai Mode Factor Divisi Berkaki jika seluruh Bonus berhasil: MF = SA x E x F x HO x UF x AS x VDL x RT x TL MF = 0.95 x 0.75 x 0.75 x 0.80 x 0.80 x 0.80 x 0.45 x 0.80 x 0.60 MF = 0.059098 6.6 Nilai Waktu Sukses Padamkan Api
Jika robot sukses padamkan lilin maka Nilai Operating Score (OS) adalah:
OS = TS x RF x MF Dimana: TS= nilai Total Score, RF = nilai Room Factor dan MF = nilai Mode Factor 6.7 Nilai Waktu Gagal Padamkan Api
Jika robot gagal padamkan lilin maka Nilai Operating Score (OS) adalah:
OS = 600 – X Dimana X jumlah total dari perolehan berikut:
Start robot menggunakan mode Sound activation akan mendapatkan pengurangan 30 points.
Robot berhasil memasuki ruangan akan diberi pengurangan score 30 poin untuk setiap ruangan (maksimal 4 ruangan, sehingga maksimal pengurangan 120 poin),
Robot mengindikasikan telah melihat api lilin (dengan cara menyalakan LED atau membuat gerakan yang dapat dianggap berusaha mencari arah api), akan diberi pengurangan score 30 poin.
Robot berhasil berhenti di lingkaran putih di sekitar lilin (dengan jari-jari 30 cm) tanpa menabrak lilin akan diberi pengurangan score 30 poin.
Dengan demikian besarnya pengurangan score maksimum adalah 210 poin. 6.8 Final Score (FS)
Final Score (FS) adalah nilai akhir dari satu sesi pertandingan:
FS = OS
7 PENENTUAN PEMENANG
Nilai FS total dari semua sesi dijumlahkan dan dirangking mulai dari FS terkecil sampai terbesar.
Tiga robot di rangking tertinggi (FS total terkecil) yang berhasil memadamkan api dinyatakan berturut-turut sebagai juara satu, dua, dan tiga.
Robot yang tidak sekalipun berhasil memadamkan lilin dalam semua sesi tidak dipertimbangkan untuk menjadi juara.
Panduan KRPAI 2013 – ver 10/17/2012 39
8 CATATAN PENTING
1. Bila ada aturan yang belum tercover pada panduan ini yang menyebabkan terjadi kesalah interpretasian baik sebelum maupun selama pertandingan, maka Juri berhak menentukan aturan yang berlaku.
2. Beberapa hal baru dari aturan Internasional TCFFRC 2013 yang belum diadopsi pada KRPAI 2013 antara lain: a) adanya asesoris lapangan “Coat Tree” (gantungan baju dengan bahan sebagian terbuat dari besi) dan b) Bonus “Candle Location” yaitu peletakan lilin tanpa lingkaran alas lilin.
3. Semua ukuran yang digunakan pada aturan 2013 ini memiliki toleransi 5%. 4. Nilai warna RGB yang diberikan hanya untuk menunjukan referensi nilai warna yang dipakai
pada standar warna di komputer. Panitia menjanjikan warna yang dipakai nanti mendekati warna referensi tersebut secara visual (bukan secara nilainya). Dengan kata lain, panitia tidak menjamin sensor warna peserta akan mendapatkan nilai warna yang sama dengan nilai warna RGB tersebut.
5. Agar mempermudah panitia/penonton/peserta/media-massa dalam pengenalan robot, untuk keperluan dokumentasi ataupun peliputan maka pada robot diharuskan terpasang stiker/tanda pengenal Institusi masing-masing. Letaknya sebaiknya yang mudah terlihat/terbaca dari atas maupun dari kejauhan. Sebaiknya dipasang dibagian punggung dan depan robot. Pemasangan pada sisi-sisi robot yang lain diperkenankan. Bila ingin menyertakan logo sponsor, perbandingan ukuran yang disarankan adalah minimal 60:40 untuk logo Institusi dan logo Sponsor.
6. Robot harus dapat mengantisipasi seluruh kemungkinan gangguan yang ada di lapangan pertandingan tidak terkecuali flash (blitz), sistem autofokus kamera, medan magnet speaker, cahaya lampu sorot Halogen, teriakan dan tepuk tangan penonton, musik yang keras, ketidak presisian penyusunan konfigurasi lapangan dan penempatan kelengkapan-kelengkapan lapangan oleh panitia lapangan, orientasi lapangan yang dapat bergeser, ketebalan karpet dan alas lilin, dan lain-lain.
7. Harus diperhitungkan adanya robot yang menggunakan teknik pemadaman menggunakan cairan atau bahkan serbuk pemadam, yang dapat mengubah warna lantai arena. Panitia akan berusaha sedapat mungkin membersihkan lantai arena dari kotoran semacam ini, tapi tidak dapat menjanjikan kondisi ideal. Koefisian gesek lantai dalam hal ini tidak didefinisikan.
8. Peserta dilarang melengkapi robotnya dengan sistem pemancar-penerima Radio Frekuensi (RF)/Bluetooth/Wi-Fi atau sejenisnya. Panitia berhak untuk memeriksa robot peserta baik sebelum, selama ataupun sesudah pertandingan.
9. Peserta selama menjalani sesi pertandingan di lapangan tidak diperkenankan memegang Handphone atau alat apapun untuk alasan apapun, juga tidak diperkenankan menyimpan tangannya di dalam saku jaket atau saku celana.
10. Panitia akan mengantisipasi kemungkinan peserta/supporter yang meremote dari jauh data tentang konfigurasi lapangan atau posisi api ke badan robot dengan fasilitas Bluetooth yang terdapat di Handphone ataupun Wi-Fi setelah undian konfigurasi lapangan dilakukan, dengan menggunakan sarana pemantau spectrum Bluetooth/Wi-Fi.
11. Panitia berupaya untuk mengeliminir segala bentuk gangguan yang disengaja baik oleh peserta maupun penonton dalam mendukung pertandingan yang fair.
12. Peserta harus dapat menunjukan “Spirit of the Game” yang baik dan sikap “Fair play”. 13. Peserta harus mematuhi Juri, Wasit dan Peraturan yang berlaku. 14. Kecurangan dalam bentuk apapun akan ditindak sesuai dengan peraturan yang berlaku atau
dikenakan sanksi sesuai dengan yang diputuskan oleh dewan Juri, mulai yang paling ringan,

Panduan KRPAI 2013 – ver 10/17/2012 40
misalnya pengurangan nilai sampai yang paling berat, misalnya black list institusi peserta dari kegiatan KRPAI.









![Penyederhanaan Fungsi Logika [Sistem Digital]maulana.lecture.ub.ac.id/files/2012/04/03_Penyederhanaan_Rangkaian... · Penyederhanaan Fungsi Logika [Sistem Digital] Mengapa perlu Penyederhanaan?](https://static.fdokumen.site/doc/165x107/5a759a457f8b9aa3618c9774/penyederhanaan-fungsi-logika-sistem-digital-a-penyederhanaan-fungsi-logika.jpg)