Pertemuan 1,2 Kontrak MK & Pengenalan Sistem Kontrol (2014)
52
KONTRAK MATA KULIAH KONTRAK MATA KULIAH Re. Sistem Re. Sistem Kontrol Kontrol Widjonarko, ST. MT. Perumahan Bumi Este Muktisari Blok KK 7 Jember Jurusan Teknik Elektro FT- UNEJ Email : [email protected]
-
Upload
adisatyasenaputra -
Category
Documents
-
view
103 -
download
0
Transcript of Pertemuan 1,2 Kontrak MK & Pengenalan Sistem Kontrol (2014)

KONTRAK MATA KULIAHKONTRAK MATA KULIAH
Re. Sistem KontrolRe. Sistem Kontrol
Widjonarko, ST. MT.Perumahan Bumi Este Muktisari Blok KK 7 JemberJurusan Teknik Elektro FT- UNEJEmail : [email protected]
Widjonarko, ST. MT.Perumahan Bumi Este Muktisari Blok KK 7 JemberJurusan Teknik Elektro FT- UNEJEmail : [email protected]

ManfaatManfaat Mata KuliahMata Kuliah
Kemajuan teknik kontrol yang berkembang Kemajuan teknik kontrol yang berkembang semakin pesat. Salah satu Indikator semakin pesat. Salah satu Indikator Sony berhasil membuat robot asimo, bisa Sony berhasil membuat robot asimo, bisa nari dan nyanyinari dan nyanyi
Mata kuliah ini ditawarkan untuk Mata kuliah ini ditawarkan untuk membantu anda memperoleh konsep membantu anda memperoleh konsep dasar dalam merancang, mendesain dan dasar dalam merancang, mendesain dan menganalisa sebuah sistem kontrolmenganalisa sebuah sistem kontrol.
Untuk dapat mengikuti perkembangan Untuk dapat mengikuti perkembangan teknik kontrol diatas, perlu menguasai teknik kontrol diatas, perlu menguasai ilmu dasar kontrolilmu dasar kontrol

Deskripsi Mata KuliahDeskripsi Mata Kuliah
Menjelaskan konsep dasar sistem kontrol
Menjelaskan Teori-teori Dasar Sistem Kontrol : Tr. Laplace dll
Menjelaskan Pemodelan Matematis Sistem Kontrol
Menjelaskan Aksi-aksi Kendali Dasar
Menjelaskan Analisis Kestabilan Sistem Kontrol
Menjelaskan Analisis Tanggapan transien
Menjelaskan Desain dan analisis sistem kontrol dengan Tempat Kedudukan Akar
menjelaskan konsep dasar sistem kontrol dan mendesain serta menganalisa sistem kontrol linier
1
2
3 4
5
6
7
8

Strategi PerkuliahanStrategi Perkuliahan
Perkuliahan dilaksanakan dengan:Perkuliahan dilaksanakan dengan:CeramahCeramahTugasTugasPresentasi dan DiskusiPresentasi dan DiskusiSimulasi dengan Matlab. Simulasi dengan Matlab.

Buku Acuan : IndonesiaBuku Acuan : Indonesia
Katsuhito Ogata,”Teknik Kontrol Katsuhito Ogata,”Teknik Kontrol Automatik”, Erlangga edisi terjemah, Automatik”, Erlangga edisi terjemah, 19971997
Benjamin C. Kuo, “Teknik Kontrol Benjamin C. Kuo, “Teknik Kontrol Automatik”, Prenhallindo edisi Automatik”, Prenhallindo edisi Indonesia, 1998Indonesia, 1998
Sahat Pakpahan, “Kontrol Otomatik:Teori Sahat Pakpahan, “Kontrol Otomatik:Teori dan penerapan ", Erlangga, jakarta, dan penerapan ", Erlangga, jakarta, 19941994
internet sebagai bahan acuan internet sebagai bahan acuan tambahan. tambahan.

Tugas/EvaluasiTugas/Evaluasi
Tugas Soal-soal latihan+presentasi Tugas Soal-soal latihan+presentasi diantaradiantara pertemuan pertemuan
Evaluasi akan diadakan dua kali : ujian Evaluasi akan diadakan dua kali : ujian tengah semester dan akhir semestertengah semester dan akhir semester
Evaluasi dalam bentuk esaiEvaluasi dalam bentuk esai

Aturan-aturanAturan-aturan
Kehadiran mahasiswa >=80% dari Kehadiran mahasiswa >=80% dari kehadiran dosenkehadiran dosen

Kriteria Penilaian Kriteria Penilaian
NilaiNilai Point Point RangeRange– AA 44 8080– BB 33 70 - 7970 - 79– CC 22 60 - 6960 - 69– DD 11 50 - 5950 - 59– EE 00 ≤49≤49

Kriteria PenilaianKriteria Penilaian
Bobot penilaian :Bobot penilaian : KehadiranKehadiran : 15 %: 15 % UTSUTS : 30 %: 30 % UASUAS : 30 %: 30 % TugasTugas : 25 %: 25 %

PenutupPenutup
Sekian dan Terima KasihSekian dan Terima Kasih
Wassalamu’alaikum wr. wbWassalamu’alaikum wr. wb

MotivasiMotivasi
Pandangan MK. Sistem Pandangan MK. Sistem KontrolKontrol
Re. Sistem KontrolRe. Sistem Kontrol
Widjonarko, ST. MT.Jurusan Teknik Elektro FT- UNEJEmail : [email protected]
Widjonarko, ST. MT.Jurusan Teknik Elektro FT- UNEJEmail : [email protected]

Materi 1 : Sejarah PerkembanganMateri 1 : Sejarah Perkembangan
1. Sistem Kontrol Klasik1. Sistem Kontrol Klasik (1900 – 1960) Sistem Kontrol SISO
1750 - JAMES WATT : Centrifugal Gov. (prakt)
1922 - MINORSKY: Model Ship Control (PD)1932 - NYQUIST : Analisis Kestabilan1934 - HANSEN : Servomekanisme1940 – 1950 - Respon Frekuensi - Metode Tempat Kedudukan Akar - dst.

Sejarah PerkembanganSejarah Perkembangan
2. Sistem Kontrol Modern2. Sistem Kontrol Modern (1960 – now) Sistem Kontrol MIMO
berbasis elektronika dan komputer.
Sistem Kontrol Optimal Sistem Kontrol Adaptip Sistem Kontrol Logika Fuzzy Sistem Kontrol Cerdas Programable Logic Control (PLC). dst

Penerapan Sistem KontrolPenerapan Sistem Kontrol
1. PROSES INDUSTRI :1. PROSES INDUSTRI :
Petrokimia & PetroliumPetrokimia & Petrolium
Industri BajaIndustri Baja
Energi ListrikEnergi Listrik
Elektronika & RobotikaElektronika & Robotika
Sandang & PanganSandang & Pangan
Konsumer produk.dst.Konsumer produk.dst.

Penerapan Sistem KontrolPenerapan Sistem Kontrol
2. INDUSTRI JASA:2. INDUSTRI JASA:
TelekomunikasiTelekomunikasi
Perhubungan Perhubungan
pariwisatapariwisata
Perdagangan Perdagangan
EkonomiEkonomi

Penerapan Sistem KontrolPenerapan Sistem Kontrol
3. STRATEGIS :3. STRATEGIS :
Air CraftAir Craft, Ship & Car, Ship & Car
MissileMissile & Satel & Satelllititee
Radar & NavigaRadar & Navigattiionon
RoRoccket & Space Craftket & Space Craft

Kontribusi Sistem KontrolKontribusi Sistem Kontrol
1. Performansi Sistem1. Performansi Sistem
Respon TransientRespon Transient
Respon FrekuensiRespon Frekuensi
Analisis ErrorAnalisis Error
KestabilanKestabilan
OptimasiOptimasi
dst.dst.

Kontribusi Sistem KontrolKontribusi Sistem Kontrol
2. Efisiensi2. Efisiensi
Tenaga ManusiaTenaga Manusia
Biaya ProduksiBiaya Produksi
3. Output Sistem3. Output Sistem
KualitasKualitas
KuantitasKuantitas

Sistem KontrolSistem Kontrol
Merupakan fokus pengkajian bidang Teknik Kontrol Otomatis, pada umumnya digambarkan sebagai sistem dinamik terkendali, terdiri dari minimal 2 (dua) bagian utama, yaitu:
1. Plant : 1. Plant : Sistem Dinamik yang dikontrol , berbentuk perangkat, atau proses yang menghasilkan keluaran (output) berupa produk, signal dsb. yang dikendalikan oleh bagian pengontrol.
2. Controller : 2. Controller : Bagian Pengontrol , merupakan perangkat, yang menghasilkan isyarat kontrol (control signal) untuk mengendalikan Plant (objek kontrol).

Sistem KontrolSistem Kontrol
reference input signal, command
isyarat masukan acuan, perintah, set-point
feedback signal
isyarat umpan-balik
output signal
keluaran, isyarat keluaran, hasil, produk
PENGENDALI
(CONTROL-LER)
KENDALIAN(PLANT)
control signal
isyarat kontrol
Konfigurasi Dasar Sistem Kontrol
SISTEM KONTROL

Istilah-istilah yang digunakan Istilah-istilah yang digunakan dalam Sistem Kontroldalam Sistem Kontrol
PlantPlant
Merupakan seperangkat peralatan yang bisa terdiri dari beberapa bagian komponen yang bekerja bersama-sama untuk melakukan suatu operasi tertentu.
Proses (process)Proses (process)
Proses didefinisikan sebagai suatu operasi atau perkembangan alamiah yang berlangsung secara kontinyu yang ditandai oleh suatu deretan perubahan kecil yang beruntun dengan cara yang relatif tetap dan menuju ke suatu hasil atau keadaan akhir tertentu

Istilah-istilah yang digunakan Istilah-istilah yang digunakan dalam Sistem Kontroldalam Sistem Kontrol
Sistem (system)Sistem (system)
Sistem adalah suatu kombinasi dari beberapa komponen yang bekerja secara terpadu untuk melakukan suatu sasaran tertentu.
Gangguan (disturbances)Gangguan (disturbances)
Merupakan suatu sinyal yang cenderung mempunyai pengaruh yang merugikan bagi harga keluaran sistem. Gangguan (disturbances) digolongkan menjadi dua:- Gangguan internal- Gangguan eksternal

Controlled Variable ( Output ) Controlled Variable ( Output ) c(t) c(t) Variabel yang akan diatur/ di “jaga” nilainya / besarnya Command controlled c(t)
Fungsi Alih Lup Terbuka ( Open Loop transfer function)Fungsi Alih Lup Terbuka ( Open Loop transfer function) Perkalian forward dengan feedback transfer function G(s).H(s) loop transfer function Sistem Lup Terbuka ( Open Loop system)Sistem Lup Terbuka ( Open Loop system) Outputnya tidak berpengaruh pada aksi pengaturan Sistem sederhana, murah Untuk sistem sederhana yg tidak memerlukan akurasi yg
baik
Istilah-istilah yang digunakan Istilah-istilah yang digunakan dalam Sistem Kontroldalam Sistem Kontrol

Lup Tertutup ( Closed Loop )Lup Tertutup ( Closed Loop ) Ada sinyal feedback berasal dari output Bagian sinyal feedback dibandingkan dengan sinyal input Feedback dapat berupa negative feedback atau positive
feedback
Actuating SignalActuating Signal Drive signal, Sinyal yang digunakan untuk menggerakkan
plant Berasal dari Sinyal error setelah dikondisikan oleh aktuator Sudah cukup kuat untuk penggerak Plant Sudah dikondisikan (sinyalnya) oleh aktuator
Istilah-istilah yang digunakan Istilah-istilah yang digunakan dalam Sistem Kontroldalam Sistem Kontrol

Feedback ElementFeedback Element Elemen yang mendeteksi /mengukur output dengan
“sensor” Sensor mengkonversi besaran sinyal output agar dapat
dibandingkan dengan besaran sinyal input
Servomekanik (Servo)Servomekanik (Servo) Biasanya untuk Sistem berupa gabungan komponen
mekanik Input konstan, error steady state dapat nol RegulatorRegulator Sistem pengaturan dengan konstan steady output output regulator selalu dijaga konstan jika syaratnya
dipenuhi Syaratnya adalah input regulator harus lebih besar dari
output agar output terjaga konstan (zener diode, regulator kompor gas)
Istilah-istilah yang digunakan Istilah-istilah yang digunakan dalam Sistem Kontroldalam Sistem Kontrol

Prinsip-prinsip Desain Sistem Prinsip-prinsip Desain Sistem KontrolKontrol
Persyaratan umum sistem kontrolPersyaratan umum sistem kontrolSetiap sistem kontrol harus stabil. Di samping kestabilan mutlak, suatu sistem kontrol harus mempunyai kestabilan relatif yang layak. Selain itu setiap sistem kontrol harus mampu memperkecil kesalahan sampai nol atau pada suatu harga yang dapat ditoleransi.
Persoalan dasar dalam desain sistem kontrolPersoalan dasar dalam desain sistem kontrolsecara matematis persoalan dasar kontrol adalah menentukan hukum kontrol optimal dengan berbagai kendala teknik dan ekonomi.

Prinsip-prinsip Desain Sistem Prinsip-prinsip Desain Sistem KontrolKontrol
AnalisisAnalisisyaitu penelitian pada kondisi tertentu, performansi sistem yang model matematiknya diketahui.
DesainDesainyaitu mencari suatu sistem yang dapat menyelesaikan tugas yang diberikan sesuai tujuan.
SintesisSintesisyaitu mencari suatu sistem dengan prosedur langsung yang akan bekerja menurut cara tertentu.

28
Jenis2 PengaturanJenis2 Pengaturan ServomekanikServomekanik
Sistem pengaturan posisi, kecepatan atau percepatansistem mekanik, motor servo
Sistem pengaturan lup terbukaSistem pengaturan lup terbuka( Open loop control system ( Open loop control system )
Hasil pada output tidak di umpan balikkan ( feedback ) Output Sistem tidak dijamin bila output tidak seperti yang dikehendaki
Sistem pengaturan lup tertutupSistem pengaturan lup tertutup( Closed loop control system )( Closed loop control system )
Sinyal Output di umpan balikkan ke input untuk me minimisasi kesalahan sebagai Self Control agar output mempunyai nilai tertentu

Set PointSet PointHarga pada input agar hasil pada output seperti yang diinginkan Menjaga output seperti yang diminta pada set point
Single Input Single Output SystemSingle Input Single Output SystemSistem dengan satu variabel input dan satu variabel output
sistem pengaturan temperatur, tekanan
Multi Input Multi Output SystemMulti Input Multi Output SystemSistem dengan banyak variabel input dan banyak variabel output
sistem pengaturan pada oil refinery , proses produksi, navigasi pesawat terbang, traffic control dengan intelligent system
Jenis2 PengaturanJenis2 Pengaturan

plantProses
input berupaseting nilaioutputresponseyangdiinginkan
output plant(tanggapan )karena
adanya input
sistem lup terbuka
aktuatorkontroler
(pengatur)PLANT
Feedback element(sensor)
input berupaseting nilaioutputresponseyangdiinginkan
output plant(tanggapan )karena
adanya input
sistem lup tertutup
SSistem pengaturanistem pengaturan Single SISO Single SISO

31
Sistem pengaturan Multi variable Sistem pengaturan Multi variable MIMOMIMO
input berupaseting nilaioutputresponseyangdiinginkan
output plant(tanggapan )karena
adanya input
controller Process
Measurement
sistem multi variable, Multi Input Multi Output

32
Pengatur(Controller)
sensorpembaca
sinyal output
Plant+
-
Diagram Bloksistem dengan kontroler arah maju dan sensor pada umpan
balik
outputinput
Gambaran konsep pengaturan (control Gambaran konsep pengaturan (control concept)concept)

Hakekat Teknik PengaturanHakekat Teknik Pengaturan
Spesifikasi Kinerja (Performance Specification) Diinginkan sistem mempunyai spesifikasi (kinerja)
tertentu Kinerja awal sistem “dihitung” dengan analisis untuk
mencapai kinerja akhir sistem yang diinginkan Bila kinerja sistem tak memenuhi spesifikasi kinerja
diinginkan, perlu modifikasi Modifikasi sering kali diperlukan untuk mencapai
kinerja untuk memperbaiki respon sistem berupa penambahan/ penyisipan komponen atau peralatan kompensator pada sistem

Problem Kinerja PengaturanProblem Kinerja Pengaturan Cara untuk mencapai / mendapatkan spesifikasi kinerja
yang diinginkan
1. Sebelum modifikasi perlu Alat bantu matematik
2. digunakan untuk membuat model matematika berupa persamaan diferensial / integral ataupun Transformasi Laplace untuk Pendekatan model persamaan matematis dari gejala alam ataupun sistem fisik yang akan diobservasi
3. Perlu penyederhanaan gambaran sistem secara keseluruhan maupun secara subsistem
4. Perlu analisa sistem
5. Perlu mengetahui karakteristik sistem

Tantangan saat ini:Tantangan saat ini:
1. Pemodelan sistem yang komplek, modern yang saling berkaitan
2. Sistem otomatisasi industri
3. Sistem manufaktur dengan robot
4. Sistem pesawat terbang
5. traffic control system di perkotaan, airport dsb
6. Security system and warning system

PenutupPenutupAda 4 hal pokok dalam pengaturan proses produksi di industri:
Man, machine, process and economics
1. Disiplin ilmu Sistem Pengaturan (control engineering) memiliki peluang untuk mengendalikan sistem secara otomatis untuk banyak hal di industri
2. Perlunya perhatian dan pemahaman sumber daya alam maupun proses pengolahan untuk kemakmuran manusia
3. Perlunya pengertian dan pemahaman sumber daya alam maupun proses industri dengan cara pemodelan sistem yang diamati
4. Ilmu Sistem Pengaturan dapat ditujukan untuk otomatisasi proses pengolahan bahan maupun proses industri ataupun otomatisasi untuk membantu meringankan memudahkan pekerjaan manusia.

Aplikasi : Pengontrolan Kecepatan Putar Motor unt. konveyor

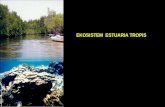
Aplikasi : Pengontrolan Temperature ruangan

Sistem Pengontrolan Temperature ruangan

Aplikasi : Pengontrolan Posisi antena

Aplikasi : SK Radar Tracking Pesawat

Sistem SK Radar Tracking Pesawat
Radar mendeteksi posisi & kec pesawat
Dipakai komputer menentukan lead & firing angle penembak
Sudut2 ini diumpankan ke power amp sebagai driver motor
Feedback signal menjamin alignment penembak sesuai yang diset komputer

Aplikasi : Kontrol Pesawat Terbang

Sistem Kontrol Elevator Pesawat Terbang

Aplikasi : Kontrol level fluida
LT
LC
MV
FT
LT
LC
MV
FT
CO
CO
PVPV
(a) (b)
Keterangan:LT: Level Transmiter (sensor ketinggian cairan)FT: Flow Transmiter (sensor aliran)LC: Level Controler (DCS/PLC)

Aplikasi : Kontrol level fluida

Aplikasi : Kontrol Manipulator Robot

Aplikasi : Pengontrolan tekanan gas

49
Road conditions
Speed
Steering
Noise
desired direction
actual direction
Response direction of travel
Time
Response speed
Time
Desired speed
Actual speed
Aplikasi : Steering Automobile

Actual output
AutomobileSteering
mechanismDriver
Desired speed or direction
Process/
Plant
ActuatorController
Desired output
Actual output
Disturbance
Open-loop menggunakan actuating device untuk mengontrol process secara langsung tanpa feedback
Kerugian : sensitivity to disturbances and system’s inability to correct for these disturbances
Sistem Steering Automobile :Open loop

51
Actual output
AutomobileSteering
mechanismDriver
Measurement
Comparison
Desired speed or direction
Process/
Plant
ActuatorController
Sensor
Desired output
Actual outputerror+
-
feedbackMeasurement output
Disturbance
Sistem Steering Automobile : Close loop

Terima Kasih( Pertemuan berikutnya Transformasi Laplace)