INDUKTIF Deep Water Culture...Sensor proximity induktif pada tugas akhir ini digunakan untuk...
15
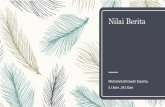
12 BAB III PERANCANGAN Pada bab ini penulis menjelaskan mengenai perancangan dan realisasi sistem 3P (Penenggelaman-Penirisan-Pengapungan) dalam pengembangan sistem hidroponik Deep Water Culture (DWC). 3.1. Gambaran Alat Sistem yang dirancang oleh penulis adalah perancangan dan realisasi sistem 3P (Penenggelaman-Penirisan-Pengapungan) dalam pengembangan sistem hidroponik Deep Water Culture (DWC). Sistem ini memiliki timer yang berfungsi untuk mengatur waktu yang sudah ditentukan saat alat melakukan sistem 3P (Penenggelaman-Penirisan- Pengapungan) yaitu saat penenggelaman dibutuhkan waktu selama 2 menit, saat penirisan dibutuhkan waktu selama 1 menit dan saat pengapungan dibutuhkan waktu selama 57 menit. MIKROKONTROLER MOTOR PENGGERAK NAIK TURUN RELAY RTC SENSOR PROXIMITY INDUKTIF DRIVER MOTOR SOLENOID VALVE INLET RELAY SOLENOID VALVE OUTLET POWER SUPPLY SENSOR ULTRASONIK Gambar 3.1. Blok diagram sistem.
Transcript of INDUKTIF Deep Water Culture...Sensor proximity induktif pada tugas akhir ini digunakan untuk...
-
12
BAB III
PERANCANGAN
Pada bab ini penulis menjelaskan mengenai perancangan dan realisasi
sistem 3P (Penenggelaman-Penirisan-Pengapungan) dalam pengembangan sistem
hidroponik Deep Water Culture (DWC).
3.1. Gambaran Alat
Sistem yang dirancang oleh penulis adalah perancangan dan realisasi sistem
3P (Penenggelaman-Penirisan-Pengapungan) dalam pengembangan sistem
hidroponik Deep Water Culture (DWC).
Sistem ini memiliki timer yang berfungsi untuk mengatur waktu yang sudah
ditentukan saat alat melakukan sistem 3P (Penenggelaman-Penirisan-
Pengapungan) yaitu saat penenggelaman dibutuhkan waktu selama 2 menit, saat
penirisan dibutuhkan waktu selama 1 menit dan saat pengapungan dibutuhkan
waktu selama 57 menit.
MIKROKONTROLER
MOTOR
PENGGERAK
NAIK TURUN
RELAY
RTC
SENSOR
PROXIMITY
INDUKTIF
DRIVER MOTOR
SOLENOID VALVE
INLET
RELAYSOLENOID VALVE
OUTLET
POWER SUPPLY
SENSOR
ULTRASONIK
Gambar 3.1. Blok diagram sistem.
-
13
3.2. Perancangan Perangkat Keras
Perangkat keras yang dirancang adalah sistem hidroponik yang kemudian
dikembangkan menjadi sistem 3P (Penenggelaman-Penirisan-Pengapungan)
dengan dimensi panjang × lebar × tinggi (100 × 50 × 100). Ada beberapa komponen
elektronik yang digunakan yaitu:
Mikrokontroler jenis Arduino Mega 2560.
Modul Real time clock
Modul Sensor ultrasonik SR04
Modul Sensor proximity induktif
Modul Relay
Modul Driver motor BTS7960
-
14
Gambar 3.2. Gambar Sketsa Sistem 3P
-
15
Gambar 3.3. Realisasi Perangkat Keras Sistem 3P
3.3. Perancangan Elektronika
Pada bagian ini menjelaskan mengenai perancangan elektronika yang
dipakai dalam sistem yang dibuat. Perancangan elektronika dalam pembuatan
sistem ini terdiri dari:
1. Mikrokontroler jenis Arduino Mega 2560 sebagai pengendali utama.
2. Modul Real time clock
3. Modul Sensor ultrasonik SR04
4. Modul Sensor proximity induktif
5. Modul Relay
-
16
6. Modul Driver motor BTS7960
7. Solenoid Valve
3.3.1. Pengendali Utama
Pengendali utama pada sistem ini menggunakan board Arduino Mega
2560 dengan IC mikrokontroler ATmega 2560. Sebagai pengendali utama,
tugas mikrokontroler antara lain:
1. Mengolah data yang didapat dari modul real time clock untuk
pewaktuan.
2. Mengolah data yang didapat dari modul sensor ultrasonik SR04 untuk
mengukur ketinggian air.
3. Mengelola data yang didapat dari modul sensor proximity induktif
untuk mengukur jarak naik turunnya panel tanaman.
4. Menghidupkan-matikan relay yang tersambung pada solenoid valve.
5. Mengoperasikan driver motor BTS7960 untuk mengatur kecepatan
putar motor.
Tabel 3.1. Konfigurasi pin mikrokontroler Arduino Mega 2560 yang
digunakan
Nama Port Terhubung
PORT 22 Terhubung dengan echo pada modul sensor ultrasonik SR04
PORT 23 Terhubung dengan trig pada modul sensor ultrasonik SR04
PORT SDA Terhubung dengan pin SDA modul RTC
PORT SCL Terhubung dengan pin SCL modul RTC
PORT A0 Terhubung dengan pin data pada sensor proximity induktif
PORT 5 Terhubung dengan modul motor driver BTS7960
PORT 4 Terhubung dengan modul motor driver BTS7960
PORT 24 Terhubung dengan modul relay
PORT 25 Terhubung dengan modul relay
-
17
Gambar 3.4. Skema Rancangan Pengendali Utama.
Keterangan gambar:
1. Modul Relay
2. Modul Driver Motor BTS7960
3. Modul Real Time Clock (RTC)
4. Projectboard
5. Mikrokontroler Arduino Mega 2560
6. Modul Sensor Proximity Induktif
7. Modul Sensor Ultrasonik SR04
-
18
3.3.2. Modul Sensor Ultrasonik SR04
Pada tugas akhir ini menggunakan sensor ultrasonik SR04 sebagai
pengecekan jarak yang dibutuhkan saat pengisian air. Pada skripsi ini
menggunakan sensor ultrasonik SR04 karena penggunaannya yang cukup
mudah dan ketersediaannya yang cukup mudah ditemukan di toko elektronik.
Berikut skema konfigurasi pin modul sensor ultrasonic SR04 dengan
Arduino Mega 2560.
Gambar 3.5. Wiring modul sensor ultrasonik SR04.
-
19
3.3.3. Real Time Clock
Real time clock (RTC) pada tugas akhir ini digunakan untuk mengatur
waktu yang sudah ditentukan saat alat melakukan sistem 3P (Penenggelaman-
Penirisan-Pengapungan) yaitu saat penenggelaman dibutuhkan waktu selama 2
menit, saat penirisan dibutuhkan waktu selama 1 menit dan saat pengapungan
dibutuhkan waktu selama 57 menit. Data waktu yang tersimpan dalam RTC
diolah oleh mikrokontroler sebagai acuan untuk pewaktuan.
Berikut skema konfigurasi pin antara modul RTC dengan Arduino
Mega 2560.
Gambar 3.6. Wiring modul real time clock (RTC).
-
20
3.3.4. Modul Sensor Proximity Induktif
Sensor proximity induktif pada tugas akhir ini digunakan untuk
mengukur jarak ketinggian panel tanaman saat melakukan penenggelaman,
penirisan, pengapungan. Sensor yang digunakan memiliki keterbatasan dengan
jarak ukur deteksi sekitar 0-4 milimeter.
Berikut skema konfigurasi pin antara modul sensor proximity induktif
dengan Arduino Mega 2560.
Gambar 3.7. Wiring Modul Sensor Proximity Induktif
-
21
3.3.5. Modul Driver Motor BTS7960
Driver motor BTS7960 digunakan pada skripsi ini untuk mengatur
kecepatan putar motor/mengkontrol PWM. Driver motor ini memiliki tegangan
sekitar 6V-27V dan arus maksimumnya sekitar 43A.
Gambar 3.8. Wiring Modul Driver Motor BTS7960
-
22
3.3.6. Modul Relay
Arduino Mega 2560 sebagai pengendali utama nantinya akan
mengendalikan modul relay yang terhubung ke solenoid valve. Relay akan
menghubung-putuskan tegangan AC dari PLN ke setiap solenoid valve.
Gambar 3.9. Wiring Modul Relay
-
23
3.4. Perancangan Perangkat Lunak
Pada bagian ini akan dijelaskan mengenai perancangan perangkat lunak
yang digunakan pada tugas akhir ini.
3.4.1. Program Utama
START
INISIALISASI
MODE PENENGGELAMAN
SELAMA 2 MENIT
MODE PENIRISAN SELAMA
1 MENIT
MODE PENGAPUNGAN
SELAMA 57 MENIT
Gambar 3.10. Diagram Alir Perancangan Perangkat Lunak
Program Utama
Berikut adalah proses kerja dari mikrokontroler:
1. Pada saat sistem awal dihidupkan, semua sistem akan melakukan
inisialisasi awal.
-
24
2. Kemudian mikrokontroler akan menjalankan motor untuk
melakukan proses penenggelaman selama 2 menit, penirisan
selama 1 menit dan pengapungan selama 57 menit.
3. Setelah proses pengapungan selama 57 menit kemudian motor akan
mengulang kembali ke proses penenggelaman. Proses ini berjalan
selama 1 jam dan dilakukan selama 24 jam.
3.4.2. Interupsi Timer 1 jam untuk mengecek level air
INTERUPSI TIMER 1 JAM
CEK LEVEL AIR
APAKAH < 50CM ?
TUTUP INLET AIR BUKA INLET AIR
RETI
TIDAK
YA
Gambar 3.11. Diagram Alir Perancangan Perangkat Lunak
Interupsi Timer 1 jam
Berikut adalah proses kerja dari mikrokontroler:
1. Proses pertama interupsi timer 1 jam kemudian dilakukan
pengecekan level air.
-
25
2. Kemudian pengecekan apakah kurang dari level apung apa belum.
Jika kurang dari level apung maka mikrokontroler akan membuka
inlet untuk melakukan pengisian air. Jika tidak kurang dari level
apung maka mikrokontroler akan menutup inlet dan tidak
melakukan pengisian air.
3.4.3. Interupsi Timer 15 hari untuk mengganti air
INTERUPSI TIMER 15 HARI
BUKA OUTLET
TUTUP OUTLET AIR
BUKA INLET AIR
APAKAH LEVEL AIR < 50CM ?
TUTUP INLET
RETI
TIDAK
IYATIDAK
YA
APAKAH AIR SUDAH HABIS?
CEK LEVEL AIR
Gambar 3.12. Diagram Alir Perancangan Perangkat Lunak Interupsi Timer
15 Hari
Berikut adalah proses kerja dari mikrokontroler:
1. Pada saat sudah 15 hari maka outlet air akan terbuka dan membuang
air.
-
26
2. Kemudian melakukan pengecekan apakah air sudah habis atau
belum.
3. Jika air belum habis maka outlet air masih terbuka untuk melakukan
pembuangan air. Jika air sudah habis maka outlet air akan tertutup.
4. Kemudian dilakukan proses pengisian air dan mikrokontroler akan
membuka inlet air untuk melakukan pengisian air. Lalu akan
dilakukan pengecekan apakah level air kurang dari level apung atau
belum.
5. Jika level air kurang dari level apung maka inlet air masih membuka
untuk proses pengisian air dan jika level air sudah mencapai level
apung maka mikrokontroler akan menutup inlet air.