Jumal Kejuruteraan 17 (2005) 47-58 Penggunaan Penggugusan … · 2016-02-19 · neural digunakan...
12
Jumal Kejuruteraan 17 (2005) 47-58 Penggunaan Penggugusan Subtraktif bagi Menjana Peraturan Kabur Agus Priyono, Muhammad Ridwan, Ahmad Jais Alias, Riza Atiq O. K. Rahmat, Azmi Hassan dan Mohd. Alauddin Mohd. Ali ABSTRAK Sebelum ini banyak kaedah bagi menghasilkan peraturan lojik kabur telah dikaji. Lojik kabur dikenal kerana ia mampu menawarkan cara yang sederhana bagi mentakrijkan penyelesaian maklumat input yang samar- samar, kabur, bising, tidak tepat atau hilang. Modellojik kabur merupakan model berasaskan empirik, bergantung kepada pengalaman operator berbanding kefahaman mereka terhadap sistem. Disebabkan oleh operasi berasaskan peraturan, lojik kabur mempunyai kemampuan untuk memproses sebanyak mung kin maklumat input yang munasabah serta ia mampu untuk menjana apa sahaja output yang dikehendaki. Namun pentakrifan pangkalan peraturan akan cepat menjadi rumit sekiranya terlalu banyak input serta output yang dipilih. Bergantung kepada sistem, penilaian setiap kemungkinan penggabungan input mung kin tidak diperlukan sekiranya ia jarang-jarang atau sama sekali tidak boleh berlaku. Dengan menggunakan algoritma penggugusan kabur, fungsi keahlian dapat dikira berdasarkan kepada dua kemungkinan kaedah penggugusan. Pertama, gugusan diunjurkan secara ortogonal ke dalam axis pemalar antiseden, dan fungsi-fungsi keahlian disesuaikan dengan unjuran tersebut. Kaedah yang kedua pula menggunakan fungsi keahlian antiseden multi dimensi, sepertimana gugusan kabur ianya diunjurkan ke dalam ruang input. Idea asas dalam penulisan kertas kerja ini ialah untuk mempelajari dan menjanakan peraturan optimum yang diperlukan bagi mengawal input tanpa mengurangkan mutu kawalan. Kertas kerja ini mencadangkan penggunaan penggugusan subtraktif bagi menjana peraturan- peraturan lojik kabur pada sistem lojik kabur Takagi-Sugeno-Kang (TSK). Lojik kabur yang dicadangkan merupakan kaedah kepintaran buatan yang digunapakai pada sistem kawalan lalu lintas bandar teragih pintar. Kaedah ini digabungkan dengan jaringan neural dan algoritma genetik bagi menentukan pemasaan isyarat dan of set pada kawalan persimpangan rangkaian di Bandar Baru Bangi. Dari kajian didapati bahawa system mampu menghasilkan 8 pusat gugusan pada 30 (3 x 10) nilai data pada jejari gugusan 0.3 dan ia juga menghasilkan 4 pusat gugusan pada jejari 0.5 dengan purata MSE 0.005. Kata kunci: Lojik kabur jenis TSK, kaedah penggugusan subtraktif, algoritma genetik, sistem kawalan lalu lintas bandar. ABSTRACT Many methodologies to develop fuzzy logic rules have been previously studied. AfuZZY logic is well known because of its ability to offer a moderate method to translate the fuzzy, noise, unaccurate or lost input. The fuzzy logic
Transcript of Jumal Kejuruteraan 17 (2005) 47-58 Penggunaan Penggugusan … · 2016-02-19 · neural digunakan...

Jumal Kejuruteraan 17 (2005) 47-58
Penggunaan Penggugusan Subtraktif bagi Menjana Peraturan Kabur
Agus Priyono, Muhammad Ridwan, Ahmad Jais Alias, Riza Atiq O. K. Rahmat, Azmi Hassan dan Mohd. Alauddin Mohd. Ali
ABSTRAK
Sebelum ini banyak kaedah bagi menghasilkan peraturan lojik kabur telah dikaji. Lojik kabur dikenal kerana ia mampu menawarkan cara yang sederhana bagi mentakrijkan penyelesaian maklumat input yang samarsamar, kabur, bising, tidak tepat atau hilang. Modellojik kabur merupakan model berasaskan empirik, bergantung kepada pengalaman operator berbanding kefahaman mereka terhadap sistem. Disebabkan oleh operasi berasaskan peraturan, lojik kabur mempunyai kemampuan untuk memproses sebanyak mung kin maklumat input yang munasabah serta ia mampu untuk menjana apa sahaja output yang dikehendaki. Namun pentakrifan pangkalan peraturan akan cepat menjadi rumit sekiranya terlalu banyak input serta output yang dipilih. Bergantung kepada sistem, penilaian setiap kemungkinan penggabungan input mung kin tidak diperlukan sekiranya ia jarang-jarang atau sama sekali tidak boleh berlaku. Dengan menggunakan algoritma penggugusan kabur, fungsi keahlian dapat dikira berdasarkan kepada dua kemungkinan kaedah penggugusan. Pertama, gugusan diunjurkan secara ortogonal ke dalam axis pemalar antiseden, dan fungsi-fungsi keahlian disesuaikan dengan unjuran tersebut. Kaedah yang kedua pula menggunakan fungsi keahlian antiseden multi dimensi, sepertimana gugusan kabur ianya diunjurkan ke dalam ruang input. Idea asas dalam penulisan kertas kerja ini ialah untuk mempelajari dan menjanakan peraturan optimum yang diperlukan bagi mengawal input tanpa mengurangkan mutu kawalan. Kertas kerja ini mencadangkan penggunaan penggugusan subtraktif bagi menjana peraturanperaturan lojik kabur pada sistem lojik kabur Takagi-Sugeno-Kang (TSK). Lojik kabur yang dicadangkan merupakan kaedah kepintaran buatan yang digunapakai pada sistem kawalan lalu lintas bandar teragih pintar. Kaedah ini digabungkan dengan jaringan neural dan algoritma genetik bagi menentukan pemasaan isyarat dan of set pada kawalan persimpangan rangkaian di Bandar Baru Bangi. Dari kajian didapati bahawa system mampu menghasilkan 8 pusat gugusan pada 30 (3 x 10) nilai data pada jejari gugusan 0.3 dan ia juga menghasilkan 4 pusat gugusan pada jejari 0.5 dengan purata MSE 0.005.
Kata kunci: Lojik kabur jenis TSK, kaedah penggugusan subtraktif, algoritma genetik, sistem kawalan lalu lintas bandar.
ABSTRACT
Many methodologies to develop fuzzy logic rules have been previously studied. AfuZZY logic is well known because of its ability to offer a moderate method to translate the fuzzy, noise, unaccurate or lost input. The fuzzy logic

48
model is based on the emphirical method depending on the operator experience comparing his understanding towards the system. According to the operation rule-based, fuzzy logic was able to process the information input immediately and also able to generate the necessary output. However, defining the rule-based quickly becomes complex if too many input and output are chosen. Depending on the system, the assessment of each possibility input might be not necessary if this very seldom or never occur. By using the fuzzy clustering algorithm, membership function could be counted based on two possible clustering methods. First, fuzzy clustering method performed in the orthogonal axis manner, the multivariable membership function can be projected to one-dimensional fuzzy sets. The second method is by using antecedent multi dimension membership function similar to the fuzzy cluster performed into input area. The basic idea in this paper work is how to learn and generate the optimum rules that required controlling input without decreasing the control quality. The subtractive clustering method to generate fuzzy logic rules on Takagi-Sugeno-Kang (TSK) fuzzy system have been utilized in this study. The suggested fuzzy logic is a smart technique which is applied into urban smart-traffic. This technique combined with neural network and genetic algorithm to determine the signal timing and offset time at Bandar Baru Bangi traffic junction control system. Based on this study, it is found that the system was able to generate 8 cluster center on 30 (3 x 10) data value at 0.3 cluster radius and also able to generate 4 cluster center at 0.5 radius with average MSE of 0.005.
Keywords: TSK type fuzzy logic, substractive clustering method, genetic aLgorithm, urban traffic controL system.
PENDAHULUAN
Selarna beberapa tahun kebelakangan pemodelan menggunakan kaedah lojik kabur banyak dikaji kerana prestasinya yang baik dalam menyelesaikan permasalahan rumit yang tidak mampu diselesaikan oleh kaedah klasik disebabkan bekalan pengetahuan yang tidak mencukupi. Model lojik kabur merupakan model berasaskan empirik, bergantung kepada pengalaman operator berbanding kefaharnan mereka terhadap sistem. Disebabkan oleh operasi yang berasaskan peraturan, maka lojik kabur mempunyai kemampuan untuk memproses sebanyak mungkin maklumat input yang munasabah serta ia marnpu untuk menjana apa sahaja output yang dikehendaki. Namun pentakrifan pangkalan peraturan akan cepat menjadi rumit sekiranya terlalu banyak input serta output yang dipilih. Oleh itu ia mungkin akan menambah bilangan peraturan disarnping dapat meningkatkan mutu kawalan. Bergantung kepada sistem, ia mungkin tidak perlu untuk menilai setiap kemungkinan penggabungan input sekiranya ia jarang atau tidak boleh berlaku sarna sekali.
Dalam sistem kawalan lalu !intas termaju, kaedah kepintaran buatan seperti jaringan neural, lojik kabur dan algoritma genetik mula digunakan untuk menentukan pemasaan larnpu isyarat, masa kitar dan of set. Jaringan neural digunakan untuk mengecam corak lalu !intas dan menentukan baris gilir kenderaan (Riza 2002) dan (Ledoux 1998), menganggarkan pengaliran lalu lintas (Yang & Qiao 1998) dan mengatur pemasaan larnpu lalu !intas

49
(Chin & Smith 1996). Lojik kabur digunakan untuk mengesan peristiwa yang berlaku di jalan ray a (Ishak & Al Deek 1998), mengawal pengaliran data lalu lintas (Trabia et al. 1999), menges an corak lalu lintas (Srinivasan et al. 2000) dan membangun kawalan lalu lintas secara simulasi (Tan Kok Khiang et al. 2002). Algritma genetik pula digunakan untuk mengoptimurnkan pamasaan lampu isyarat (Nakatsuji et al. 1994), mengoptimurnkan kawalan persimpangan terpisah dengan meminimurnkan lengah setiap kenderaan (Taale 2000) dan menggunakan gabungan algoritma genetik, TRANSYT dan penganggar lintasan pengaliran kenderaan untuk membangunkan sistem kawalan lalu lintas (Ceylan & Bell 2004).
Dalam kajian yang dilakukan, lojik kabur digunakan bagi menentukan pemasaan lampu isyarat, mas a kitar dan of set pada persimpangan rangkaian. Input bagi lojik kabur ini adalah panjang baris gilir dan strategi kawalan yang dihasilkan oleh jaringan neural dua-tahap. Jaringan neural tersebut digunakan bagi memproses imej lalu lintas yang dikesan oleh kamera video. Dalam sistem kawalan yang dibangunkan pula, ia menggunakan algoritma genetik bagi mengoptirnurnkan inferens pada lojik kabur sehingga didapatkan pemasaan lampu isyarat yang optimum.
Penggugusan subtraktif diaplikasikan pada lojik kabur kerana ia diperlukan untuk mendapatkan peraturan kabur yang paling sesuai bagi menggambarkan keadaan lalu lintas yang bersifat berterusan dan bukan bersifat peringkatan (gradation). Pada keadaan lazim, peraturan lojik kabur adalah peringkatan. Ia memerlukan ban yak peraturan agar dapat mewakili keadaan yang berterusan. Oleh itu diperlukan penggugusan bagi menjana peraturan kabur yang dapat menggambarkan keadaan yang berterusan tersebut.
PENJANAAN PERATURAN LOJIK KABUR
Pembelajaran algoritma bagi menjana peraturan lojik kabur secara automatik telah banyak diperkenalkan (Herrera & Verdegay 1996). Algoritma pembelajaran ini akan menjana peraturan kabur berdasarkan kepada vektor pembelajaran dan kelakuan input-output daripada sistem. Sebuah struktur peraturan yang sangat sederhana dan menghadkan fungsi keahlian yang mana ianya memimpin untuk penyelesaian masalah jauh daripada nilai optimum telah digunakan oleh (Cheong & Lai 2000). Peraturan kabur mempunyai sebuah penyelesaian geometri di dalam ruang input-output, umumnya mempunyai bentuk elipsoid (Dickerson & Kosko 1996). Peraturan kabur menyebabkan cara penyelesaian seperti ini sebahagian kabur dalam ruang hasil daripada pemalar input-output. Algoritma penggugusan kabur pula merupakan cara yang sesuai untuk menges an bahagian kabur ini. Pengkaji lain telah juga mencadangkan penggunaan kaedah penggugusan kabur (Sugeno & Yasukawa 1993; Yager & Filev 1993; Wang & Langari 1996). Beberapa di antaranya telahpun mengaplikasikan cara ini secara berasingan bagi setiap domain daripada pemalar input dan output dalam sistem dan kemudian model kabur dirumuskan dalam bentuk persamaan kabur (Surmann & Selenschtschikow 2002). Sebahagian penyelidik lain hanya menggunakannya pada pemalar input dan menggabungkan hasilnya dengan sebuah kaedah kabur TSK (Takagi-Sugeno-Kang) menggunakan set kabur dari anteseden (Takagi & Sugeno 1985).

50
Model kabur ini dicadangkan pada awalnya oleh Takagi pada tahun 1985 dan kemudiannya dikenali sebagai model TSK (Takagi & Sugeno 1985; Sugeno & Kang 1988). Ia mempunyai peningkatan keuntungan secara analisis teori dan aplikasi daripada lojik kabur dalam pemodelan dan kawalan. Model kabur TSK digabungkan dengan peraturan kabur yang mempunyai bentuk khusus dengan sebuah jenis-penggunaan dan bukan tuntutan kabur biasa sepertimana dalam kaedah model (Mamdani 1976). Pendekatan TSK
cuba untuk menguraikan ruang input ke dalarn sub-ruang dan kemudian menganggarkan sistem dalam setiap sub-ruang menggunakan model regresi lelurus sederhana. Watak ini menyediakan model yang cekap untuk berurusan dengan sistem yang rurnit, termasuk penjanaan peraturan kabur dan struktur prernis yang khas yang sukar secara teknikal dan mungkin menimbulkan persoalan pengaturcaraan tak lelurus.
Sejak sistem TSK digunapakai untuk menganggarkan dan mengawal permasalahan yang rurnit (Papadakis & Theocharis 2002), sistem kabur memerlukan anteseden dan kesinambungan (konsekuen) untuk menggambarkan hubungan lojikal di antara input dan output yang ianya digunakan sebagai asas untuk mendapatkan ouput yang dikehendaki (Cox 1994). Oleh itu untuk mendapatkan output yang sesuai, kesinarnbungan ditetapkan sebagai hubungan lojik daripada anteseden dan ianya boleh merupakan sebuah pemalar daripada anteseden. Sistem kabur TSK mempunyai output yang sangat sensitif terhadap perubahan input disebabkan oleh kesinambungan daripada lojik kabur adalah sistem fungsi-pemalar pada anteseden.
Beberapa penyelidik telah menggunakan kaedah penggugusan lojik kabur dalam ruang hasil daripada ruang input-output menggunakan kaedah ini bagi menges an interaksi an tara pemalar-pemalar input dan output. Sebahagian lainnya menggunakan penggugusan kabur bagi mengesan set kabur multi dimensi dalam ruang hasil daripada pemalar input dan dalam mencuba melakukan pengesanan prernis set peraturan kabur dan kemudiannya menugaskan kesinambungan lelurus kepada setiap peraturan. Proses mengenalpasti dari model-model lojik kabur dapat dipertingkatkan menggunakan rujukan set kabur multi dimensi (Sin & De Figueiredo 1993). Dari sekarang penggugusan kabur memberikan kenaikan kepada model regresi tempatan. Model ini kemudiannya disusun ke dalam kenyataan peraturan if-then.
Bentuk peraturan kabur TSK mempunyai peraturan if-then seperti berikut
R (r) : if Xl is AIr and x2 is A~ and ... and xm is An~ then Yr is 1r (x), (1)
dengan: 1r (x) = ct:. + air XI + ........ + a"'r xm'
yang mana (r = 1, .. ... , n) dan Xj (1 ::; j ::; m). merupakan pemalar input, Yr
adalah pemalar output, An;. adalah set kabur, dan 1r (x) adalah fungsi lelururs. Menggunakan persamaan ini, model TSK dari setiap peraturan kabur menggambarkan tingkah laku lelurus tempatan yang digabungkan ke dalam daerah input kabur yang disifatkan sebagai anteseden peraturan kabur.
51
Bagi setiap input, katakanlah bahawa x = (Xl,.. x2r
' .... x"'), output dari model kabur TSK dihitung beradasrkan persamaan berikut:
y=
dengan,
L~=lA,(x)* f,(x)
L~=lA,(x) =
A (x) = 1" = Al(x l )*A2(X2'* ...... * Am (x"') r r r r r,.J r r'
(2)
(3)
dan 1" adalah tingkat firing daripada peraturan ke- r untuk input semasa X. r
Algoritma ini sangat menarik sebagai inferens lojik kabur dan merupakan proses penyahkaburan yang disepadukan ke dalam prosedur satu tahap (Gomez et al. 1999).
Penjelasan dari model kabur TSK telah dibincangkan dalam (Demirli et al. 2003), yang mana ianya bergantung kepada pernilihan pusat dan sisihan piawai. Hanya sekiranya sebahagian prernis ruang input telah terbentuk di dalam axis ortogonal, fungsi keahlian multi pemalar dapat diunjurkan ke dalam set kabur satu-dimensi A. Perlu di ingat bahawa model output lojik kabur TSK adalah lelurus di dalam pewajar w tetapi ia tak lelurus di dalam pusat gugusan c dan sisihan piawai a.
PENGGUGUSANSUBTRAKTW
Gagasan daripada penggugusan kabur adalah membahagikan ruang data ke dalam gugusan kabur, yang mana setiap satu menggambarkan satu bahagian yang khas dalam kelakuan sistem. Selepas membuat unjuran gugusan ke dalam ruang input, bahagian anteseden daripada peraturan kabur dapat dikenalpasti. Bahagian kesinambungan dari peraturan kabur pula merupakan fungsi yang sederhana, dan dengan cara sedernikian sebuah gugusan mempunyai hubungan dengan peraturan kabur daripada model TSK.
Menggunakan algoritma penggugusan kabur, fungsi keahlian dapat ditentukan sesuai dengan dua kaedah. Dalam kaedah yang pertama, gugusan diunjurkan secara ortogonal ke dalam axis pemalar anteseden dan fungsi keahlian selanjutnya disesuaikan dengan unjuran tersebut. Kaedah kedua pula menggunakan fungsi keahlian antes eden multi dimensi sepertimana gugusan kabur diunjurkan kedalam ruang input. Rajah 1 menggambarkan secara skema kaedah yang kedua. Melalui kaedah ini, darjah fungsi keahlian daripada titik data akan dikira terus dalam unjuran gugusan sesuai dengan jaraknya daripada unjuran pusat gugusan.
Beberapa kaedah penggugusan telah dikenal pasti dan diselidiki oleh (Chiu 1994; Demirli et al. 2003). Kaedah pertama yang diperkenalkan adalah K-means, yang kedua kaedah C-means kabur, yang ketiga kaedah gunung dan kemudian yang keempat kaedah penggugusan subtraktif sebagai sebuah algoritma noniterative (Chiu 1994).
Pada awalnya kaedah subtraktif diperkenalkan oleh Chiu (1994). Dalam kaedah ini, titik data akan diskala ulangkan [0,1] ke dalam setiap dimensi. Setiap titik data z = (x,y) akan ditetapkan keupayaannya P , sesuai dengan
J J J J
lokasinya dan seterusnya untuk semua titik data yang lain:

52
RAJAH 1. Unjuran gugusan kabur ke dalam ruang anteseden secara ruang input-output 3 dimensi dengan d
i menggambarkan pusat gugusan
p/ = i> -allxi -x jr , j=l
dengan,
a= L 'a
P:= nilai keupayaan data i sebagai pusat gugusan, a = pewajar antara data i sehingga data j, x = titik data, r = pemalar (biasanya ditetapkan), dan ra = pemalar positif, disebut juga jejari gugusan.
(4)
(5)
Keupayaan titik data untuk menjadi pusat gugusan adalah lebih tinggi manakala banyak data yang mempunyai kedudukan berhampiran. Titik data dengan keupayaan yang tertinggi, yang diwakili dengan P: ianya akan dijadikan sebagai pusat gugusan yang pertama c
1 = (d
1, e
1). Kemudian,
keupayaan ini akan diulang kira untuk seluruh titik data tidak termasuk pengaruh daripada pusat gugusan, sesuai dengan :
P> P:- P: t;, dengan,
S = e _/iflxi_xkI1
2,
4 b = 2"
rb '
rb = 'a * TI, P: = nilai keupayaan data i , P: = nilai keupayaan data sebagai pusat gugusan, C = pusat gugusan data, b = pewajar dari data i ke pusat gugusan, r j = jarak antara pusat gugusan, TI = faktor hempap.
(6)
(7)
(8)
(9)

53
Seterusnya, titik data dengan keupayaan yang tertinggi P: akan dijadikan sebagai pusat gugusan seterusnya c
k' jika
(10)
dengan d-min adalah jarak minimum antara cl
dan semua pusat gugusan yang sebelumnya, maka titik data tetap diterima sebagai pusat gugusan seterusnya Cl . Proses iterasi seterusnya dapat dibentuk untuk mendapatkan pusat gugusan yang baru c
2• Sekiranya pusat gugusan tidak memenuhi
keadaan di atas, maka ia akan ditolak sebagai pusat gugusan dan keupayaan titik data tersebut ke O. Titik data dengan keupayaan tertinggi seterusnya P: akan dipilih sebagai kemungkinan pusat gugusan yang baru dan akan diuji semula. Penggugusan akhir akan berlaku sekiranya keadaan sedemikian berlaku seperti mana persamaan berikut:.
P: < E P~, dengan :
E = nisbah penolakan, E ' = nisbah penerimaan.
(11)
Nilai pemalar r., 1], E dan E ' telah dicadangkan oleh (Chiu 1994; Demirli et al. 2003; Vernieuwea et al. 2004). Setiap pusat gugusan dipertimbangkan sebagai sebuah peraturan kabur yang mana ia menggambarkan bahawa kelakuan sistem daripada jarak ditakrifkan sebagai pusat gugusan:
(12)
Persamaan di atas merupakan bentuk umum daripada penggugusan subtraktif dan ianya memerlukan sebuah algoritma bagi memproses penggugusan data. Dalam kertas kerja ini, karni mencadangkan sebuah algoritma untuk menggugus data bagi melakukan pembelajaran sistem kawalan lalu lintas bandar sepertimana dipaparkan di dalam Rajah 2.
Algoritma tersebut menghasilkan pusat vektor dan nilai sigma dari setiap gugusan yang dibina berasaskan kepada model yang dibina oleh (Chiu 1994). Algoritma yang dicadangkan pada Rajah 2 digunakan bagi menentukan keahlian data pembelajaran dari setiap gugusan sebagai berikut :
(13)
Inferens lojik kabur digunakan untuk mengumpulkan kesemua peraturan kabur bagi menentukan output jelas (crisp) . Namun pembinaan sistem inferens kabur mestilah berasaskan kepada peraturan kabur.
Dalam kes pengoptimuman sistem inferens model TSK, jumlah peraturan adalah sesuai dengan jumlah pusat gugusan. Proses penggugusan

54
Set data input
Set nilai pemalar
Tentukan nilai data
nonnal
Tentukan keupayaan setiap
titik input
MULA
\lI .-Xli
MaxP,
\V \lI ri. T/, f·, E,
Al-mm, Al- Cnt,
max VI
\V ~ Al-"orm Cnt'i
W ~/ Pi
If m = 1. I'- 11/j
m> 1
RAJAH 2. Algoritma proses penggugusan
Tentukan keupayaan
tertinggi
Tentukan Dusat IWgUSan
Masukkan data sebenar
Tentukan sigma gugusan
menghasilkan nilai pusat gugusan dan sigma gugusan yang akan digunakan bagi membentuk peraturan kabur. Dari sinilah fungsi keahlian setiap data dalam setiap gugusan pula dapat dijana dan antes eden daripada setiap peraturan dapat dinilai mutunya menggunakan teori himpunan seperti berikut (Gomez, et a1. 1999): a. Hubungan AND digunakan untuk operasi minimum b_ Hubungan OR digunakan untuk operasi maksimum
Proses penilaian mutu bagi setiap peraturan akan menghasilkan nilai batas-kekuatan dari setiap peraturan_ Nilai ini adalah pewajar untuk pangkalan peraturan kabur untuk mengset output kabur. Dalam kajian ini output kabur dicadangkan dikira menggunakan kaedah purata pewajar seperti berikut (Tong 1980) :
o = ...!.r=;::!1~R::---- (14)
~>r r=1
dengan, o = output kabur, a = nilai batas-kekuatan (fittnes), R = jumlah peraturan kabur (sarna banyak dengan pusat gugusan).
55
Pada umumnya prestasi daripada pembelajaran yang diselia, ianya dinilai menggunakan ralat purata kuasa dua (MSE), yang dihitung berdasarkan kepada pecahan masa hijau oleh sistem, serta pecahan mas a hijau yang dikira oleh seorang pakar. Nilai MSE dikira menggunakan persamaan berikut:
n
L/ti-yr l MSE = i=1 --'=--- - ; 'IIr'
n yr ~ f(x),
dengan, MSE = ralat purata kuasa dua, n = jurnlah data.
(15)
Persamaan di atas memerlukan fungsi yr ~ f(x) dengan pemalar, a, yang dikira menggunakan algoritma genetik.
HASIL PERATURAN KABUR
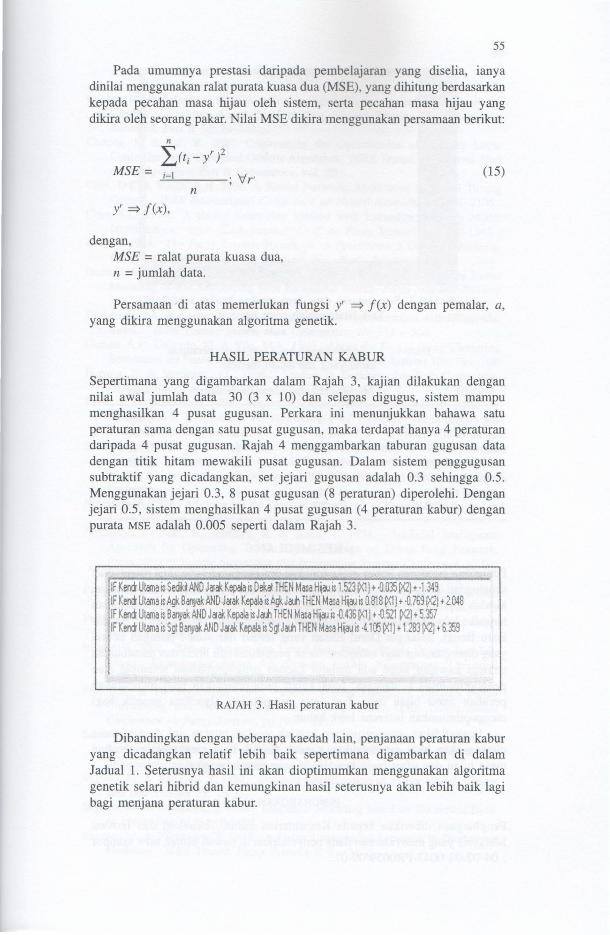
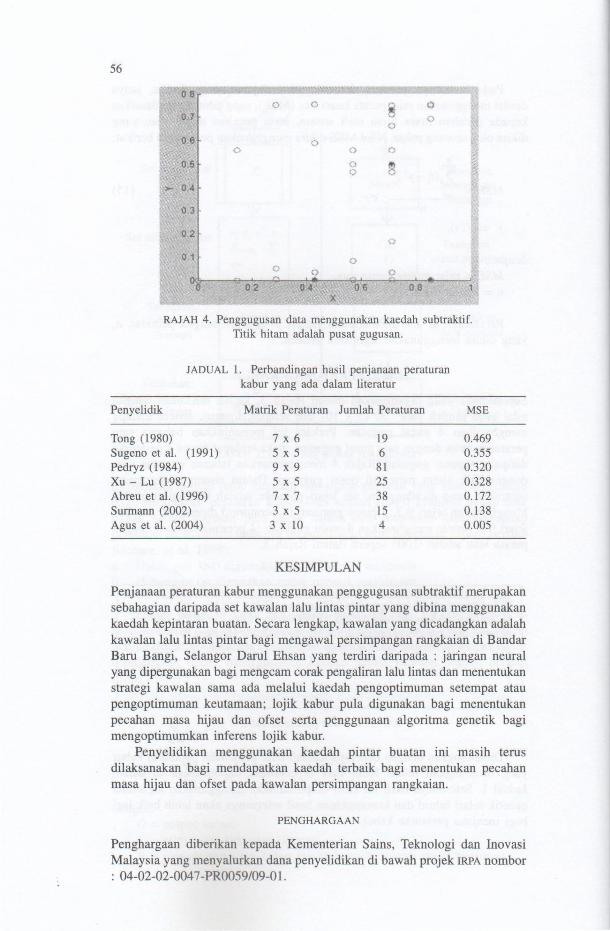
Sepertimana yang digambarkan dalam Rajah 3, kajian dilakukan dengan nilai awal jurnlah data 30 (3 x 10) dan selepas digugus, sistem mampu menghasilkan 4 pusat gugusan. Perkara ini menunjukkan bahawa satu peraturan sama dengan satu pusat gugusan, maka terdapat hanya 4 peraturan daripada 4 pusat gugusan. Rajah 4 menggambarkan taburan gugusan data dengan titik hitam mewakili pusat gugusan. Dalam sistem penggugusan subtraktif yang dicadangkan, set jejari gugusan adalah 0.3 sehingga 0.5. Menggunakan jejari 0.3, 8 pusat gugusan (8 peraturan) diperolehi. Dengan jejari 0.5, sistem menghasiikan 4 pusat gugusan (4 peraturan kabur) dengan purata MSE adalah 0.005 seperti dalam Rajah 3.
IF Kerd Utama ~ Sedki AND Jarlf; K~ ~ Deka! THEN Masa Hijau ~ 1.523 (X1) + .Q035IX2) + 1349 IF Kerd Ulama~Agk B~ANDJarak KepalaisAgkJalti THEN MasaHijau ~ 0.818 (X1) + ·0.769 IX2J + 2.048 IF Kerd Utama~B~AND JarakKepaIa~Ja\Jl THEN MasaHiau~ .o.436(X1] + ()521IX2) + 5.357 IF Kerd Ulama ~ Sgt B~itAND Jaral:. Kepaia ~ SgtJa\tl THEN Masa Hijau ~ ·4.1(6 P<11 + 12831X21 + 6.359
RAJAH 3. Hasil peraturan kabur
Dibandingkan dengan beberapa kaedah lain, penjanaan peraturan kabur yang dicadangkan relatif lebih baik sepertimana digambarkan di dalam ladual 1. Seterusnya hasil ini akan dioptirnurnkan menggunakan algoritma genetik selari hibrid dan kemungkinan hasil seterusnya akan lebih baik lagi bagi menjana peraturan kabur.
56
08
0.7 0 0 8 0
0 0
06 0 0 0 0
0 .5 0 ()
>- 04
0 3
02 o
01 o o o o
0-0 02 0 .4 06 08
RAJAH 4. Penggugusan data menggunakan kaedah subtraktif. Titik hitam adalah pusat gugusan.
JADUAL 1. Perbandingan hasil penjanaan peraturan kabur yang ada dalam literatur
Penyelidik Matrik Peraturan Jumlah Peraturan
Tong (1980) 7 x 6 19 S ugeno et al. (1991) 5 x 5 6 Pedryz (1984) 9 x 9 81 Xu - Lu (1987) 5 x 5 25 Abreu et al . (1996) 7 x 7 38 Surmann (2002) 3 x 5 15 Agus et al. (2004) 3 x 10 4
KESIMPULAN
MSE
0.469 0.355 0.320 0.328 0.172 0.138 0.005
Penjanaan peraturan kabur menggunakan penggugusan subtraktif merupakan sebahagian daripada set kawalan lalu lintas pintar yang dibina menggunakan kaedah kepintaran buatan. Secara lengkap, kawalan yang dicadangkan adalah kawalan lalu lintas pintar bagi mengawal persimpangan rangkaian di Bandar Baru Bangi, Selangor Darul Ehsan yang terdiri daripada : jaringan neural yang dipergunakan bagi mengcam corak pengaliran lalu lintas dan menentukan strategi kawalan sama ada melalui kaedah pengoptimuman setempat atau pengoptirnuman keutamaan; lojik kabur pula digunakan bagi menentukan pecahan mas a hijau dan of set serta penggunaan algoritma genetik bagi mengoptimurnkan inferens lojik kabur.
Penyelidikan menggunakan kaedah pintar buatan ini masih terus dilaksanakan bagi mendapatkan kaedah terbaik bagi menentukan pecahan mas a hijau dan of set pada kawalan persimpangan rangkaian.
PENGHARGAAN
Penghargaan diberikan kepada Kementerian Sains, Teknologi dan Inovasi Malaysia yang menyalurkan dana penyelidikan di bawah projek IRPA nombor : 04-02-02-0047-PR0059/09-0 1.
57
RUJUKAN
Ceylan, H. & Bell, M.G.H. 2004. Traffic Signal Timing Optimization Based on Genetic Algorithm Approach, Including Drivers-Routing. Transportation Research, Part B 38: 29-342.
Cheong, F. & Lai, R. 2000. Constraining the Optimizasion of a fuzzy Logic Controller using Enhanced Genetic Algorithm. IEEE Transc. on Systems Man and Cybernetics, Part B Cybernetics, vol. 30.
Chin, D.C & Smith, R.H. 1996. A Neural Network: Application in Signal Timing Control. IEEE International Conference on Neural Networks 4: 2101-2106.
Chiu, S.L. 1994. A cluster Estimation Method with Extension to Fuzzy Model Identification. Proc. IEEE Internat. Con! on Fuzzy Systems, pp.1240-1245.
Cox, E. 1994. The Fuzzy Systems Handbook: A Practitioner 's Guide to Building, Using, and Maintaining Fuzzy Systems. New York: Academic Press.
Demirli, K., Cheng, S.X. & Muthukumaran, P. 2003. Subtractive Clustering Based Modeling of Job Sequencing with Parametric Search. Fuzzy Sets and Systems 137: 235-270.
Dickerson, J.A & Kosko, B. 1996. Fuzzy Function Approximation with Ellipsoidal Rules. IEEE Transc. System Man Cybernetics, 26: 542 - 560.
Gomez, AF., Delgado, M. & Vila, M.A 1999. About the Use of fuzzy Clustering Techniques for Fuzzy Model Identification. Fuzzy Set and Systems 106: 79 - 188.
Herrera, F. & Verdegay, J.L. 1996. Studies in Fuzzines dan Soft Computing. Genetic Algorithm dan soft Computing. Physical Verlag.
Ishak, S. & AI-Deek, H. 1998. Freeway Incident Detection Using Fuzzy ART. 5th
International Conference on Application of Advance Technologies on Transportation Engineering.
Ledoux, C. 1998. A Neural Network Traffic Flow Model for Heavy Traffic Conditions. Advanced Technologies in Transportation Engineering. Proceeding of the 5th International Conference. 265-279. American Society of Civil Engineers.
Mamdani, E. 1976. Advances in the Linguistic Synthesis of Fuzzy Controllers. Int. Journal in Man-Machine Studies, 669-678.
Nakatsuji, T., Seki, S., Shibuya, S. & Kaku, T. 1994. Artificial Intelligence Approach for Optimizing Traffic Signal Timings on Urban Road Network. Proceeding of Vehicle Navigation and Information Systems Conference, pp.199 - 202.
Papadakis, S.E. & Theocharis, J.B. 2002. A GA-based Fuzzy Modeling Approach for Generating TSK Models. Fuzzy Sets and Systems 131: 121 - 152.
Pedryz, W. 1984. An Identification Algorithm in Fuzzy Relational Systems. Fuzzy Sets and Systems 13: 153 - 167.
Riza Atiq. 2002. Sistem Pengawalan Lalu Lintas Pintar. Thesis Doktor Falsafah, Jabatan Kejuruteraan Awam dan Struktur, Fakulti Kejuruteraan, Universiti Kebangsaan, Bangi, Selangor, Malaysia.
Sin, S.K. & De Figueiredo. 1993. Fuzzy System Designing Through Fuzzy Clusteruing and Optimal preDefuzzification. Proc. IEEE International Conference on Fuzzy Systems, pp.190 - 195.
Srinivasan, D., Cheu, R. L., Poh, Y. P & Chwee Ng, A. K, 2000. Development of An Intelligent Technique for Traffic Network Incident Detection. Engineering Applications of Artificial Intelligence 13: 311 - 322.
Sugeno, M. & Kang, G. T. 1988. Structure Identification of Fuzzy Model. Fuzzy Sets and Systems 28: 15-33.
Sugeno, M. & Yasukawa, T. 1991. Linguistic Modeling based on Numerical Data. In Preceeding of ISA, Brussel.
Sugeno, M. & Yasukawa, T. 1993. A Fuzzy Logic-based Approach to Qualitative Modeling. IEEE Transc. Fuzzy Systems 1: 7 - 31.

58
Surmann, H. & Selenschtschikow, A. 2002. Automatic Generation of Fuzzy Rule Bases: Example 1. Proc. of the NF2002 First International ICSC on NeuroFuzzy Technologies, pp. 75.
Taale, H. 2000. Optimising Traffic Signal Control With Evolutionary Algorithms. Proceedings of 7th World Congress on Intelligent Transport Systems. CD-ROM. Turin.
Takagi, T. & Sugeno, M. 1985. Fuzzy Identification of Systems and its Application to Modeling and Control. IEEE Trans. Systems Man Cybernetics 15: 116 - 132.
Tan Kok Khiang, Marzuki Khalid & Rabiah Yusof. 2002. Intelligent Traffic Light Control by Fuzzy Logic. (atas talian) http://archive.cs.uu.nllpubIRUU/CS/ techreps/CS-2004/2004-029.
Tong, R.M. 1980. The Evaluationof Fuzzy Model Derived from Experimental Data. Fuzzy Sets and System 4: 1 - 12.
Trabia, M.B., Kaseko, M.S. & Ande, M. 1999. A Two Stage Fuzzy Logic Controller for Traffic Signals. Transportation Research, Part C, pp. 353 - 367.
Vernieuwea, H., Georgieva, 0., De Baets, B., Pauwels, V. R. N., Verhoest, N. E. C, & De Troch, F. P. 2004. Comparison of Data-Driven Takagi-Sugeno Models of Rainfall-Discharge Dynamics. Journal of Hydrology 20: 1-14.
Wang, L. & Langari, R. 1996. Complex System Modeling via Fuzzy Logic. IEEE Trans. System Man Cybernetics 26: 100 - 106.
Yager, R.T. & Filev, D.P. 1993. Unified Structure and Parameter Identification of Fuzzy Models. IEEE Transc. System Man Cyberntics 23: 157 - 165.
Yang, H. & Qiao, F. 1998. Neural Network Approach to Classification of Traffic Flow States. Journal of Transportation Engineering. 124: 521-525.
Agus Priyono Ahmad Jais Alias Mohd. Alauddin Mohd. Ali Jabatan Kejuruteraan Elektrik, Elektronik dan Sistem Fakulti Kejuruteraan 43600 UKM Bangi, Selangor D.E.
E-mel: [email protected]/[email protected]
Mohamad Ridwan Azmi Hassan Jabatan Kejuruteraan Mekanikal dan Bahan Fakulti Kejuruteraan 43600 UKM Bangi, Selangor D.E.
Em-el: ridwan [email protected]
Riza Atiq O. K. Rahmat Jabatan Kejuruteraan Awam dan Struktur. Fakulti Kejuruteraan 43600 UKM Bangi, Selangor D.E.
E-mel: [email protected]