PENGURUSAN KEWANGAN UNIVERSITI TOPIK : PEROLEHAN TOPIK : PEROLEHAN.

of 41
Upload
azmi-abdul-rahmanCategory
view
269download
07/28/2019 Topik 2 Prinsip Kawalan
1/41
Topik 2: PRINSIP
PENGAWALAsas sistem kawalan
7/28/2019 Topik 2 Prinsip Kawalan
2/41
Pengenalan
Sebelum teknologi berkembang,operator digunakan untuk mengawalsesuatu proses seperti membuatpelarasan injap bagi mengawal parastangki ataupun mengawal kadar aliran
untuk kawalan proses yang rumit adalahtidak praktikal untuk menggunakan
operator satu alat yang boleh melaksanakan
tugas ini telah direka dan dinamakanpengawal (controller).
7/28/2019 Topik 2 Prinsip Kawalan
3/41
DEFINASI PENGAWAL
Pengawal boleh didefinisikan sebagaisatu alat yang menerima isyarat
daripada dua masukan iaitu isyarat
yang dihantar oleh transmitter (nilaipengukuran-MV) dan nilai yang
ditetapkan oleh titik set (set point-SP).
7/28/2019 Topik 2 Prinsip Kawalan
4/41
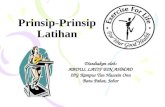
Gambarajah Blok Pengawal
2.1
Comparator
mechanism
(Mekanisma
pembanding)
Feedback
mechanism
(Mekanisma
suapbalik)
Relay
(geganti)
Sensor
(Pengesan)
MV
SP
Output
(Keluaran)
Supply
(Bekalan
Kuasa)
7/28/2019 Topik 2 Prinsip Kawalan
5/41
Merujuk kepada Rajah 2.1
Sekiranya pengawal berfungsi dengansempurna dan proses berada dalamkeadaan terkawal atau stabil makaisyarat pengukuran adalah sama dengan
titik set. Mekanisma pembanding pula berfungsi
sebagai pembanding kedua-dua isyaratmasukan.
Ralat wujud sekiranya nilai masukanadalah tidak sama. Pengesan akanmengesan isyarat ralat ini danmenentukan samada berlakuketidakseimbangan antara isyarat ralatdan isyarat suapbalik.
7/28/2019 Topik 2 Prinsip Kawalan
6/41
Samb..
Jika terdapat perbezaan, pengesanakan mengimbangi kedua-dua isyarat
tersebut.
Mekanisma suapbalik adalahmekanisma yang mengimbangi sistem
supaya isyarat suapbalik sentiasa
sama dengan isyarat keluaran.
7/28/2019 Topik 2 Prinsip Kawalan
7/41
Prinsip Kendalian Pengawal
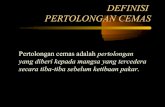
Rajah 2.3 menunjukkan gambarajahskematik sebuah pengawal
Pada keadaan seimbang, ralat tidak
wujud. Oleh itu, keluaran sentiasa tetap.
Sekiranya isyarat pengukuran (MV)
yang dihantar oleh transmitterberubah atau bertambah, pengepak
akan bergerak menghampiri muncung.
7/28/2019 Topik 2 Prinsip Kawalan
8/41
Samb..
Hasil gerakan ini akan menyebabkantekanan balik muncung akan bertambahdan udara akan memasuki geganti danbelos suapbalik.
Semasa gerakan isyarat suapbalik samadengan gerakan isyarat asal masukan,tekanan balik muncung akan
menstabilkan dan seterusnyamengimbangi pengawal.
Keluran boleh diubah samada denganmengubah isyarat pengukuran ataupun
mengubah nilai titik set.
7/28/2019 Topik 2 Prinsip Kawalan
9/41
Samb..
Kedua-dua isyarat masukan ditambahsama banyak, tiada gerakan akanberlaku kerana tiada perbezaan antaradua isyarat dan pelarasan tidak perludibuat.
Jika tiada perbezaan dalam keluaranisyarat maka ia dikenali sebagai isyarat
ralat sifar. Jika nilai pengukuran lebih besar
daripada nilai titik set, isyarat ralat positifdan sekiranya nilai pengkuran lebih
besar daripada nilai set point, isyarat
7/28/2019 Topik 2 Prinsip Kawalan
10/41
Rajah 2.3
7/28/2019 Topik 2 Prinsip Kawalan
11/41
Komponen-komponen Utama
Pengawal Terdiri daripada:
Mekanisma pembanding(Comparator
mechanism)
Pengesan(Controller) Mekanisma suapbalik(Feedback
mechanism)
7/28/2019 Topik 2 Prinsip Kawalan
12/41
Mekanisma pembanding
Mekanismapembanding(Comparator
mechanism) - Ia terdiri daripada dua
belos, iaitu untuk isyarat pengukurandan isyarat titik set. Ia berfungsi
membandingkan kedua-dua isyarat
masukan tersebut
7/28/2019 Topik 2 Prinsip Kawalan
13/41
Pengesan
Pengesan (Sensor) - terdiri daripadapengepak dan muncung. Ia berfungsi
mengesan isyarat isyarat ralat
daripada keluaran pembanding danisyarat suapbalik.
7/28/2019 Topik 2 Prinsip Kawalan
14/41
Bellows
Bellows terdiri daripada logam tipisyang dibentuk menjadi bentuk
gelombang silinder.
Tekanan udara akan menekan kebawah.
Apabila tekanan udara meningkat,
Bellows akan memanjangkan dananjakan wujud.
Anjakan ini dikaitkan dengan 'tuil' mudah
untuk memberi bacaan tekanan
meningkat.
7/28/2019 Topik 2 Prinsip Kawalan
15/41
Mekanisma suapbalik
Mekanisma suapbalik (Feedbackmechanism) - terdiri daripada belos
suapbalik. Ia berfungsi menstabil dan
menseimbangkan system. Ia jugadapat member kesan terhadap
penghasilan gandaan sesebuah
pengawal.
7/28/2019 Topik 2 Prinsip Kawalan
16/41
Rajah Bellows
Unknown pressure Bellows
movement
7/28/2019 Topik 2 Prinsip Kawalan
17/41
7/28/2019 Topik 2 Prinsip Kawalan
18/41
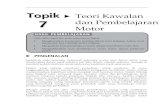
Flapper nozzle
Adalah transduser sasaran yangmenganjak ke parameter perbezaantekanan.
Pada asasnya udara digunakansebagai cecair kerja.
Udara akan memberikan pemalarmasa kira-kira 0.1s.
Flapper nozzle digunakan untukmengukur anjakan antara sel beban.
Anjakan ini adalah sangat kecil
7/28/2019 Topik 2 Prinsip Kawalan
19/41
Rajah Flapper nozzle
Fixed ResistanceVariable Resistance
x
Flapper Plat Measured element
0
s
7/28/2019 Topik 2 Prinsip Kawalan
20/41
7/28/2019 Topik 2 Prinsip Kawalan
21/41
7/28/2019 Topik 2 Prinsip Kawalan
22/41
Restrictor
Ketepatan alat dijamin oleh pengeluarhanya untuk had tertentu. Biasanya ia
dinyatakan dalam bentuk peratus
skala penuh instrumen yangtertentu. Pesongan dari spesifikasi
dipanggil ralat penghad (Restrictor).
7/28/2019 Topik 2 Prinsip Kawalan
23/41
Jenis-jenis Aksi Pengawal
Kawalan Perkadaran(Proportionalcontroller)
Kawalan Pengkamilan(Integral
controller) Kawalan Pembezaan(Derivative
controller)
7/28/2019 Topik 2 Prinsip Kawalan
24/41
Samb..
Ketiga-tiga aksi ini boleh digunakansecara individu atau bergandingan
bergantung kepada sesuatu proses
yang hendak dikawal. Bentuk satu ragam iaitu perkadaran
(Proportional-P), Pengamilan
(Intergral-I) dan Pembezaan(Derivative-D).
7/28/2019 Topik 2 Prinsip Kawalan
25/41
Manakala bentuk dua ragam ialahPerkadaran dan pengamilan (P+I) dan
Perkadaran dan pembezaan (P+D).
Bentuk tiga ragam pula ialahgabungan ketiga-tiga aksi kawalan
iaitu Perkadaran, pengkamilan dan
pembezaan (P+I+D).
7/28/2019 Topik 2 Prinsip Kawalan
26/41
Proportional Controller (P)
Kawalan ini terdapat dalam pengawalberkadaran yang keluarannya sentiassaberkadar terus dengan isyarat ralat, e.
Jika isyarat ralat kecil, aksi kawalan punkecil dan sekiranya ralat besar makaaksi kawalan pun besar.
Aksi kawalan berlaku sebaik sahaja
pengawal dapat mengesan ralat. Keluaran bergantung pada gandaan
pengawal, Kc iaitu :
Keluaran pengawal = gandaan pengawal
x ralat
7/28/2019 Topik 2 Prinsip Kawalan
27/41
Merujuk kepada Rajah 2.4
Bila isyarat pengukuran sama nilaidengan titik set, sistem akan stabil ataudengan kata lain jika masukan prosessama dengan keluaran proses, maka
keaadan mantap akan dicapai. Sekiranya pengawal jenis perkadaran ini
digunakan, offset akan berlaku di manaisyarat pengukuran tidak akan mencapaititik set.
Oleh itu, sekiranya injap kawalan perludibuka 50%, maka ia perlu disetkan lebihdaripada 50% untuk mencapaikestabilan.
7/28/2019 Topik 2 Prinsip Kawalan
28/41
Rajah 2.4
7/28/2019 Topik 2 Prinsip Kawalan
29/41
Intergral Controller-I
Pengawal pengkamilan membersambutan kepada kamilan isyarat ralat
terhadap masa.
Jadi keluaran adalah berkadarandengan luas di bawah lengkok ralat
dengan masa,
Keluaran pengawal dt Rajah 2.5, kedudukan belos dan
spring adalah terbalik berbanding
dengan pengawal perkadaran dalam
7/28/2019 Topik 2 Prinsip Kawalan
30/41
Rajah 2.5
7/28/2019 Topik 2 Prinsip Kawalan
31/41
Kawalan Pembezaan
(Derivative Controller-D) Pengawal member sambutan kepada
kadar perubahan ralat, tidak kepada
perubahan magnitude.
Keluaran berkadaran denganpembezaan isyarat ralat terhadap
masa iaitu,
Keluaran pengawal
7/28/2019 Topik 2 Prinsip Kawalan
32/41
Samb..
Jika ralat tidak berubah atau tetap maka tiadakeluaran.
Rajah 2.6 menunjukkan rajah kawalanpembezaan. Kawalan pembezaan
mempunyai satu penghad yang dipanggilpenghad pembezaan.
Penghad inilah yang membezakan di antarakawalan berkadaran dengan kawalan
pembezaan. Dalam keadaan mantap pengawal
pembezaan tidak mempengaruhi keluarandan ia kerap digunakan jika proses
melibatkan kehadiran suhu.
7/28/2019 Topik 2 Prinsip Kawalan
33/41
Rajah 2.6
Sistem Kawalan Dua Ragam
7/28/2019 Topik 2 Prinsip Kawalan
34/41
Sistem Kawalan Dua Ragam
(Proportional + Integral
Controller P+I) Mekanisma pembanding yang terdiridaripada dua belos diletakkan dihujungtuil, manakala dihujung yang satu lagiialah dua belos suapbalik.
Pengesan terletak di antara mekanismasuapbalik dan pembanding.
Terdapat dua perkara yang ditambahpada pengawal iaitu belos kamilan/resetdan penghad kamilan (bolehlaras).
Bila isyarat pengukuran bertambah,pengepak akan menghampiri muncungdan meningkat keluaran.
7/28/2019 Topik 2 Prinsip Kawalan
35/41
Samb..
Tekanan yang meningkat ini akanmenyebabkan belos berkadaranmengubah kedudukan pengepak danmenstabilkan tekanan keluaran.
Tekanan akan jatuh bila ia melaluipenghad kamilan. Tekanan ini akan memasuki belos
kamilan dan bertindak menolak
pengepak menghampiri muncung. Oleh itu tekanan keluaran boleh
ditingkatkan lagi.
7/28/2019 Topik 2 Prinsip Kawalan
36/41
Samb..
Jika isyarat pengukuran sama nilaidengan titik set keadaan mantap akantercapai dan tekanan keluaran akanmenjadi stabil.
Offset dapat dihapuskan. Jika keadaan mantap tidak tercapai
maka penghad kamilan bolehlahdilaraskan.
Jika penghad kamilan dibukasepenuhnya pengawal akan berfungsisebagai pengawal ON/OFF.
Jika penghad kamilan ditutup
sepenuhnya pengawal akan berfungsiseba ai en awal erkadaran saha a.
7/28/2019 Topik 2 Prinsip Kawalan
37/41
Rajah 2.7 - Asas system kawalan
dua ragam
Sistem Kawalan Tiga Ragam
7/28/2019 Topik 2 Prinsip Kawalan
38/41
Sistem Kawalan Tiga Ragam
(Perkadaran + Pengkamilan +
Pembezaan-P+I+D) Kendaliannya adalah sama dengan pengawal
P+I tetapi pengawal ini ditambah denganpenghad pembeza.
Bagi pengawal jenis ini ketiga-tiga aksi kawalan
mempengaruhi sambutannya. Oleh itu kita perlu melaraskan setiap kawalan
supaya ia sepadan dengan proses yang hendakdikawal.
Ini bermakna pelarasan ini perlu dilakukansecara individu supaya proses menjadi stabil danoffset dapat dihapuskan.
Bagi mencapai keadaan tersebut, penghadkamilan dan penghad pembezaan perludilaraskan dengan betul.
7/28/2019 Topik 2 Prinsip Kawalan
39/41
Rajah 2.8 - Pengawal tiga
ragam
7/28/2019 Topik 2 Prinsip Kawalan
40/41
Kelebihan dan kekurangan Setiap
Aksi PengawalAksi Pengawal Kelebihan Kekurangan
Perkadaran (P) Sambutan cepat bila
beban bertukar
Wujud offset
Pengkamilan (I) Boleh hapuskan offset Masa pemulihan lama
Pembezaan (D) Dapat kurangkan offset Keluaran tiada bilaralat
tiada
P+I Boleh hapuskan offset dan
sambutan cepat
Masa pemulihan lama
P+D Dapat kurangkan masa
pemulihan dan offset
Offset masih lagi
terjadi
7/28/2019 Topik 2 Prinsip Kawalan
41/41
ADA SOALAN?
TERIMA KASIH