Aljabar Linear Suatu Gerbang Untuk Memahami...
244
Aljabar Linear Suatu Gerbang Untuk Memahami Matematika dan Aplikasinya Version 1.0 12 Pebruari 2016 Subiono * J u r u s a n M a t e m a t i k a F M I P A - I T S , S u r a b a y a * M Matematika Subiono — Email: [email protected] Alamat: Jurusan Matematika Institut Teknologi Sepuluh Nopember Sukolilo Surabaya Indonesia
-
Upload
hoangkhanh -
Category
Documents
-
view
272 -
download
1
Transcript of Aljabar Linear Suatu Gerbang Untuk Memahami...
Aljabar Linear Suatu Gerbang Untuk MemahamiMatematika dan Aplikasinya
Version 1.0
12 Pebruari 2016
Subiono
*Ju
rusan
Matematika
FM
IPA- I TS, Sura
baya
*MMatematika
Subiono — Email: [email protected]
Alamat: Jurusan MatematikaInstitut Teknologi Sepuluh NopemberSukolilo SurabayaIndonesia
2
Copyright
c© 2016 The Author.
*Ju
rusan
Matematika
FM
IPA- I TS, Sura
baya
*MMatematika
Kata Pengantar
Alhamdulillahirabbilalamin, segala puji hanyalah milikmu ya Allah yang telah meberikan "kebe-basan bertanggung jawab" kepada manusia untuk suatu kebaikan dalam melaksanakan amanat-nya di hamparan bumi yang dihuni manusia. Sholawat dan Salamkepadamu ya Nabi Muhammadbeserta para keluarganya dan para pengikutnya sampai nantidi hari akhir.
Buku ini disusun dengan maksud untuk digunakan sebagi buku rujukan mata kuliah Al-jabar Linear Elementer dan Aljabar Linear pada Jurusan Matematika, Institut Teknologi SepuluhNopember, Surabaya. Materi disusun untuk kebutuhan struktur dalam Kurikulum tahun 2009-2014 guna menunjang matakuliah yang ada pada semester yang lebih tinggi. Selain dari pada itumateri dari buku ini disusun supaya pengguna yang lainnya bisa memanfaatkan buku ini sesuaidengan yang dibutuhkannya.
Dalam buku ini diberikan beberapa konsep pengertian dari materi yang disajikan setelah itudiikuti dengan beberapa contoh untuk mempermudah pemahaman, selain itu juga diberikan be-berapa contoh aplikasi yang mungkin dan beberapa soal sebagai latihan.
Penulis pada kesempatan ini menyampaikan keaktifan pembaca dalam mengkaji buku iniuntuk menyampaikan kritik dan saran guna perbaikan buku ini, sehingga pada versi yang men-datang "mutu buku" yang baik bisa dicapai. Kritik dan saran ini sangat penting karena selainalasan yang telah disebutkan tadi, penulis percaya bahwa dalam sajian buku ini masih kurang darisempurnah bahkan mungkin ada suatu kesalahan dalam sajian buku ini baik dalam bentuk redak-sional, pengetikan dan materi yang menyebabkan menjadi suatu bacaan kurang begitu bagus.Kritik dan saran bisa disampaikan ke alamat email :[email protected]
Buku ini dapat diperoleh secara gratis oleh siapapun tanpa harus membayar kepada penulis.Hal ini berdasarkan pemikiran penulis untuk kebebasan seseorang mendapatkan suatu bacaanyang tersedia secara bebas dengan maksud "kemanfaatan" dan"kejujuran". Yang dimaksud den-gan kemanfaatan adalah bergunanya bacaan ini untuk kemudahan pembaca memperoleh infor-masi penting yang diperlukannya dan untuk pembelajaran. Sedangkan kejujuran adalah ikatan
i
ii
moral dari pembaca untuk tidak memdistribusi buku in dengantujuaan yang tidak bermanfaat.
Penulis menulis buku ini berdasarkan pemikiran "kebebasanmenulis" (tidak harus menggu-nakan media cetak penerbit) dengan asas "kemanfaatan" menggunakan media yang tersaji masakini. Beberapa alat bantu untuk penulisan buku ini juga didapat secara gratis, yaitu perangkat lu-nak LATEX dan WinEdt sebagai salah satu media LATEX editor. Beberapa gambar yang ada dalambuku ini menggunakan perangkat lunak LaTexDraw yang juga didapat secara gratis. Begitu jugabeberapa bahan rujukan didapat secara gratis lewat internet. Selain itu untuk menyelesaikan be-berapa contoh yang dibahas digunakan alat bantu perangkat lunak SAGE versi 6.9, perangkatlunak ini juga didapat dari internet secara gratis.
Akhirnya, dengan segala kerendahan hati penulis memohon kepada Allah semoga penulisanini bisa berlanjut untuk versi mendatang yang tentunya lebih "baik" dari Versi 1 yang tersediasaat ini dan semoga benar-benar buku yang tersaji ini bermanfaat bagi pembaca.
Surabaya, 12 Pebruari 2016
b
*Ju
rusan Matematika
FM
IPA- I TS, Sura
baya
*MMatematika
Penulis

Daftar Isi
Kata Pengantar i
1 Pengenalan Vektor 1
1.1 Vektor dan Kombinasi Linear. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Hasil kali titik dan Panjang vektor. . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Sistem Persamaan Linear 17
2.1 Sistem Persamaan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Menyelesaikan Sistem Persamaan. . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3 Menyelesaikan Sistem Persamaan Linier dengan Sage NoteBook . . . . . . . . . 38
2.4 Matriks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.5 Aritmatika dan Operasi Matriks. . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.5.1 Penambahan, Pengurangan Matriks dan Perkalian Matriks . . . . . . . . 48
2.6 Matriks-matriks Khusus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.7 Sifat-sifat Aritmatika Matriks. . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.8 Matriks Invers dan Matriks Elementer. . . . . . . . . . . . . . . . . . . . . . . 65
2.9 Mendapatkan Matriks Invers. . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.10 DekomposisiLU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.11 Peninjauan Ulang Sistem Persamaan. . . . . . . . . . . . . . . . . . . . . . . . 77
3 Determinan 79
3.1 Fungsi Determinan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.2 Sifat-sifat Determinan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Metode Kofaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.4 Reduksi Baris Untuk Menghitung Determinan. . . . . . . . . . . . . . . . . . . 79
iii
iv
3.5 Aturan Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4 Ruang-n Euclide 81
4.1 Vektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2 Perkalian Titik dan Perkalian Silang. . . . . . . . . . . . . . . . . . . . . . . . 81
4.3 Ruang-n Euclide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.4 Transformasi Linear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.5 Contoh-contoh Transformasi Linear. . . . . . . . . . . . . . . . . . . . . . . . 81
5 Ruang Vektor 83
5.1 Lapangan(Field). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.2 Ruang Vektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.3 Ruang Bagian (Subspace). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.4 Pembentang (Span). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.5 Bebas Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.6 Basis dan Dimensi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.7 Perubahan Basis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.8 Ruang Bagian Fundamental. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.9 Ruang Hasil Kali Dalam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.10 Basis Orthonormal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.11 Kuadrat Terkecil (Least Square). . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.12 DekomposisiQR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.13 Matriks Orthogonal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.14 General Invers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6 Nilai-Karakteristik dan Vektor-Karakteristik 123
6.1 Sekilas Mengenai Determinan. . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.2 Nilai-Karakteristik dan Vektor-Karakteristik. . . . . . . . . . . . . . . . . . . . 123
6.3 Eksistensi Nilai-Karakteristik dan Vektor-Karakteristik . . . . . . . . . . . . . . 123
6.4 Sifat-sifat Nilai-Karakteristik dan Vektor-Karakteristik . . . . . . . . . . . . . . 123
6.5 Kesimilaran dan Pendiagonalan. . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7 Transformasi Linear 125
7.1 Ruang Null dan Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7.2 Isomorpisma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.3 Matriks Representasi dari suatu Pemetaan Linier. . . . . . . . . . . . . . . . . 156
7.4 Similaritas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika v
7.5 BENTUK NORMAL DIAGONAL SATUAN . . . . . . . . . . . . . . . . . . . 171
7.6 Vektor-Karakteristik dan Ruang-Karakteristik Tergenaralisir . . . . . . . . . . . 174
7.7 Pendiagonalan Matriks Persegi. . . . . . . . . . . . . . . . . . . . . . . . . . . 176
7.8 Orthogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
7.9 PROSES ORTHOGONAL GRAM-SCHMIDT . . . . . . . . . . . . . . . . . . 196
7.10 Dekomposisi Spektral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
7.11 FaktorisasiQR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
7.12 DEKOMPOSISI NILAI SINGULAR . . . . . . . . . . . . . . . . . . . . . . . 221
7.13 Bentuk Kanonik Jordan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
Daftar Pustaka 237
Bab 1Pengenalan Vektor
Dalam bab ini dikenalkan pengertian vektor, khususnya vektor pada bidangR2 dan pada ruangR3. Beberapa pengertian dan hasil-hasil pembahasan nantinyadigunakan dalam bab berikut-nya khususnya untuk menyelesaikan sistem persamaan linear. Beberapa contoh yang dibahas
Gambar 1.1: Tampilan Sage Notebook Ver. 6.9
juga dihitung menggunakan perangkat lunak Sage Notebook Version 6.9. Perangkat lunak inisetara dengan perangkat lunak Matlab, Maple dan Mathematica. Sage Notebook selain mampumelakukan komputasi secara numerik juga mampu melakukan komputasi secara simbolik. Gam-bar1.1adalah tampilan perangkat lunak Sage Notebook Version 6.9.
1.1 Vektor dan Kombinasi Linear
1
2
Dalam bagian ini dibahas pengertian suatukombinasi linier dari vektor-vektor di bidangR2
danR3. Pengertian ini bisa diperluas untuk vektor diRn. Himpunan semua vektor diRn dina-makan ruang vektorRn atas himpunan semua bilangan riilR dan dinamakan ruang-n Euclideyang akan dibahas di Bab4. Mengenai pengertian ruang vektor secara umum atas suatula-pangan(himpunan skalar) akan dibahas dalam Bab5. Ruang vektorRn sangat penting, sebabdalam pembahasan di Bab5 ditunjukkan bahwa sebarang ruang vektorV atas suatu lapanganFberdimensin isomorpikdenganRn.
Vektor pada bidang atau ruang dimensi duaR2 disajikan sebagai vektor kolom yang terdiridari dua komponen, ditulis sebagai:
vvv=
[v1
v2
]
,www=
[w1
w2.
]
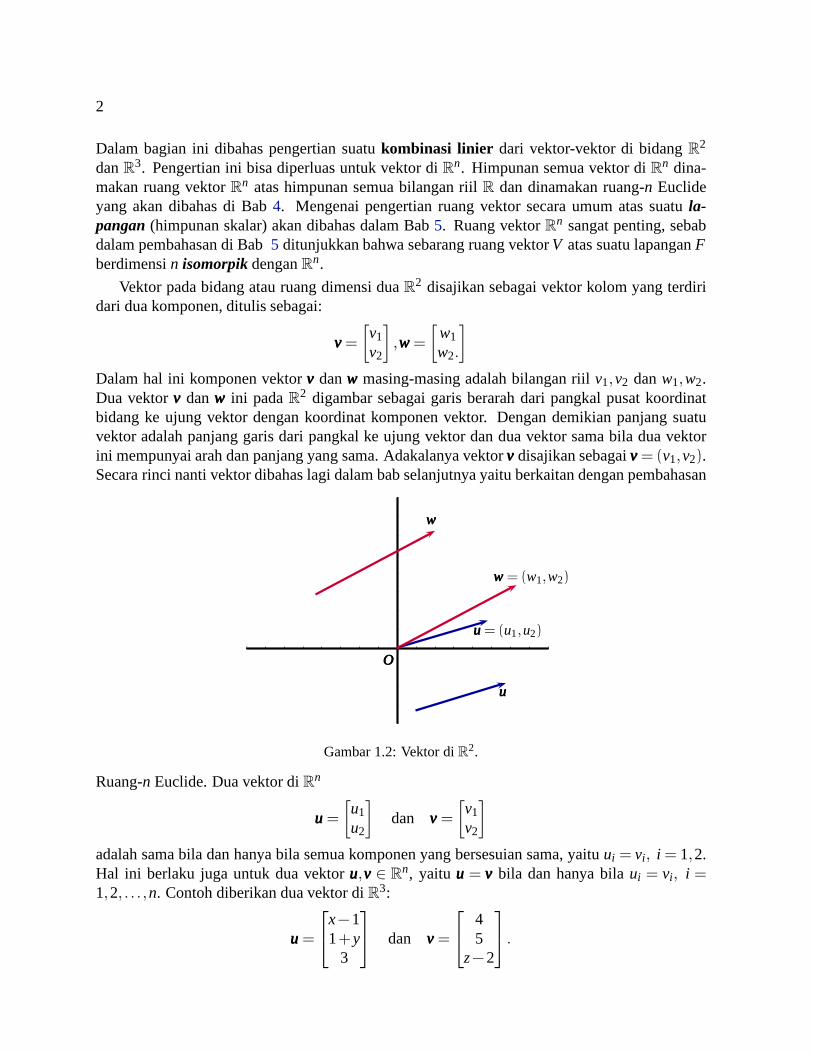
Dalam hal ini komponen vektorvvv danwww masing-masing adalah bilangan riilv1,v2 danw1,w2.Dua vektorvvv danwww ini padaR2 digambar sebagai garis berarah dari pangkal pusat koordinatbidang ke ujung vektor dengan koordinat komponen vektor. Dengan demikian panjang suatuvektor adalah panjang garis dari pangkal ke ujung vektor dandua vektor sama bila dua vektorini mempunyai arah dan panjang yang sama. Adakalanya vektorvvv disajikan sebagaivvv= (v1,v2).Secara rinci nanti vektor dibahas lagi dalam bab selanjutnya yaitu berkaitan dengan pembahasan
uuu= (u1,u2)
www= (w1,w2)
uuu
www
OOO
Gambar 1.2: Vektor diR2.
Ruang-n Euclide. Dua vektor diRn
uuu=
[u1
u2
]
dan vvv=
[v1
v2
]
adalah sama bila dan hanya bila semua komponen yang bersesuian sama, yaituui = vi , i = 1,2.Hal ini berlaku juga untuk dua vektoruuu,vvv ∈ Rn, yaitu uuu = vvv bila dan hanya bilaui = vi , i =1,2, . . . ,n. Contoh diberikan dua vektor diR3:
uuu=
x−11+y
3
dan vvv=
45
z−2
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 3
Bila uuu = vvv, maka dapatkan nilai darix,y danz. Karenauuu = vvv, makax− 1 = 4,1+ y = 5 dan3= z−2. Sehingga didapatx= 5,y= 4 danz= 5.
Operasitambah dua vektorvvv danwww ditulisvvv+www diberikan oleh:
vvv+www=
[v1+w1
v2+w2
]
.
Sedangkan operasiperkalianskalara∈ R dengan vektor diR2 diberikan oleh:
avvv=
[av1
av2
]
, dengan demikian didapat−3www=
[−3w1
−3w2
]
.
Catatan bahwa sebarang vektorvvv∈R2 ditambah vektor−vvv adalah vektor nol 000R2, tentunya vektor000R2 bukan bilangan nol(0), sebab
000R2 =
[00
]
.
Dari pembahasan operasi tambah sebarang dua vektor diR2, jelas bahwavvv+www=www+vvv.
Pengertian kombinasi linear dari vektorvvv danwww adalah masing-masing vektor dikalikanskalar lalu hasilnya ditambahkan, yaitu untuk skalarc1,c2 ∈ R didapat suatukombinasi lineardariuuu danwww yang dituliskan sebagai
c1vvv+c2www.
Contoh berikut menjelaskan bahwa vektorwww adalah suatu kombinasi linear dari vektoruuu danvvvdengan
www=
[7−1
]
, uuu
[15
]
dan vvv=
[33
]
,
sebab
−2uuu+3vvv=−2
[15
]
+3
[33
]
=
[−2+9−10+9
]
=
[7−1
]
=www
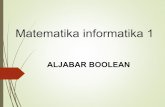
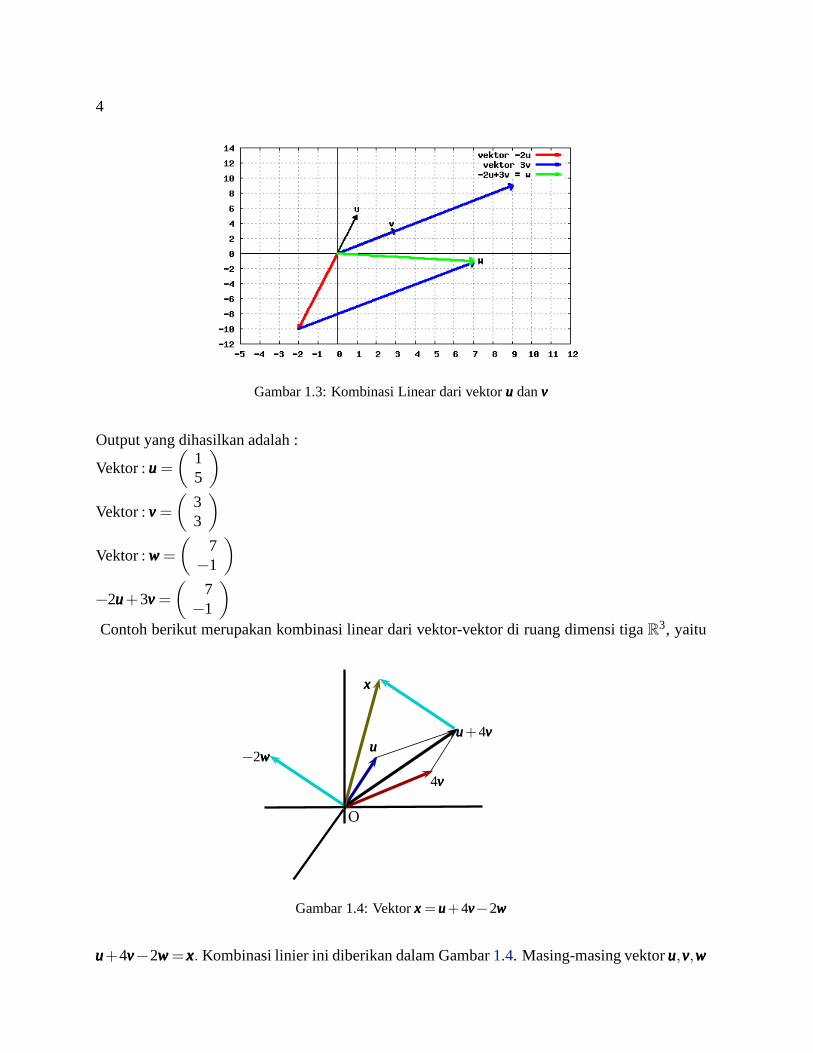
Secara geometri bidang diR2, kombinasi linear tsb. diberikan dalam Gambar1.3.
Perintah untuk malakukan kombinasi linier dari dua vektoruuu danvvv sama dengan vektorwwwdalam sel Sage Notebook dilakukan sebagai berikut:
u=vector(QQ,[1,5]).column()v=vector(QQ,[3,3]).column()w=vector(QQ,[7,-1]).column()pretty_print(tml("Vektor : $\pmb{u} = %s$"%latex(u)))printpretty_print(html("Vektor : $\pmb{v} = %s$"%latex(v)))printpretty_print(html("Vektor : $\pmb{w} = %s$"%latex(w)))printpretty_print(html("$-2\pmb{u} +3\pmb{v} = %s$"%latex(-2*u+3*v)))
4
Gambar 1.3: Kombinasi Linear dari vektoruuu danvvv
Output yang dihasilkan adalah :
Vektor : uuu=
(15
)
Vektor : vvv=
(33
)
Vektor : www=
(7
−1
)
−2uuu+3vvv=
(7
−1
)
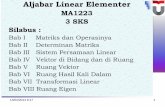
Contoh berikut merupakan kombinasi linear dari vektor-vektor di ruang dimensi tigaR3, yaitu
O
uuu+4vvvuuu
4vvv
−2www
xxx
Gambar 1.4: Vektorxxx= uuu+4vvv−2www
uuu+4vvv−2www=xxx. Kombinasi linier ini diberikan dalam Gambar1.4. Masing-masing vektoruuu,vvv,www

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 5
danxxx adalah:
103
,
121
,
23−1
dan
129
yang memenuhi
1uuu+4vvv−2www = 1
103
+4
121
−2
129
=
1+4−40+8−63+4+2
=
129
= xxx.
Sebelum mengakhiri bagian ini, perlu diingatkan bahwa pengertian darikombinasi liniersangat penting. Sebab istilah ini akan sering digunakan pada hampir keseluruhan pembahasan.
1.2 Hasil kali titik dan Panjang vektor
Pada bagian ini dibahas hasil kali titik dua vektoruuu danvvv di R2, selanjutnya dibahas panjangsuatu vektor. Hasil kali titikuuu danvvv di R2 ditulisuuu ·vvv dengan
uuu=
[u1
u2
]
dan vvv=
[v1
v2
]
didefinisikan sebagaiuuu ·vvv= u1v1+u2v2
Contoh untukuuu danvvv di R2 diberikan oleh
uuu=
[4−2
]
dan vvv=
[36
]
maka perkalian titikuuu·vvv adalah
uuu·vvv=[
4−2
]
·[36
]
= 4(−3)+2(6) = −12+12= 0
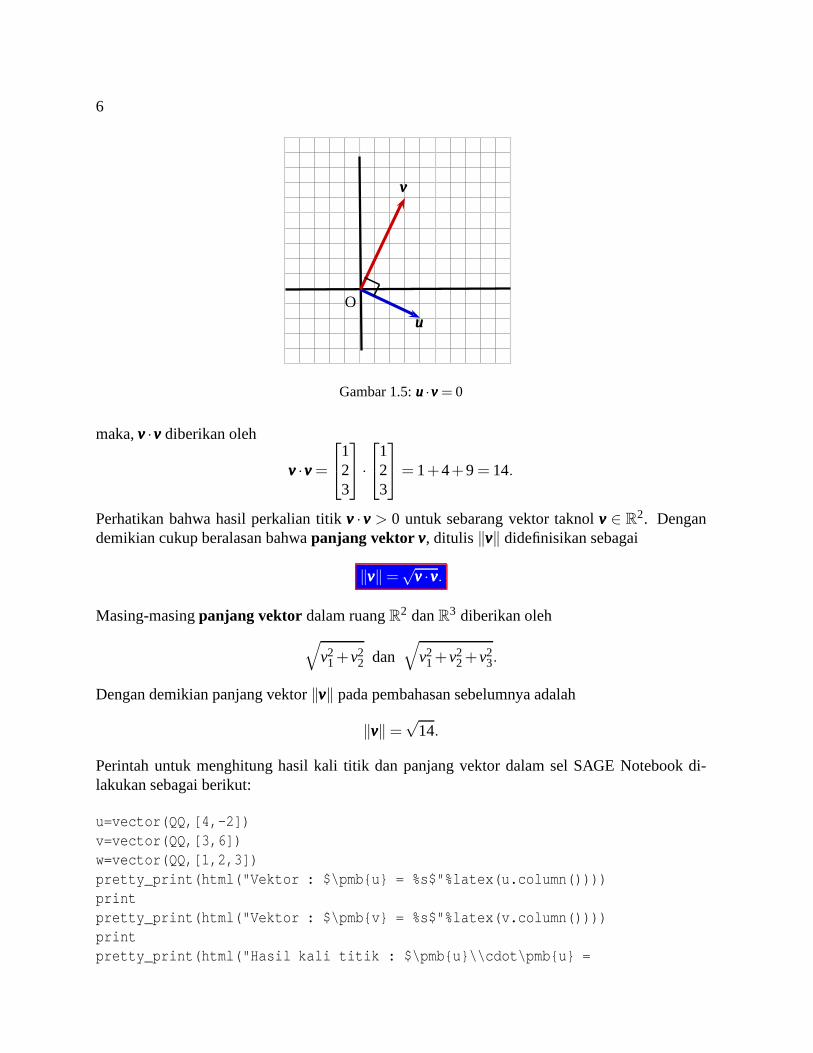
Terlihat hasil kali titikuuu ·vvv adalah 0. Bilangan nol suatu yang khusus, begitu juga untuk hasilkali titik yang menghasilkan nilai nol, hal ini mempunyai arti secara geometris vektoruuu danvvvsaling tegak lurus. Kasus ini diberikan oleh Gambar1.5. Suatu kasus penting dari hasil kali titikdariuuu danvvv adalah bilauuu= vvv. Misalnya vektor tak nolvvv di R3 diberikan oleh
vvv=
123
6
uuu
vvv
O
Gambar 1.5:uuu·vvv= 0
maka,vvv·vvv diberikan oleh
vvv·vvv=
123
·
123
= 1+4+9= 14.
Perhatikan bahwa hasil perkalian titikvvv ·vvv > 0 untuk sebarang vektor taknolvvv ∈ R2. Dengandemikian cukup beralasan bahwapanjang vektor vvv, ditulis ‖vvv‖ didefinisikan sebagai
‖vvv‖=√vvv·vvv.
Masing-masingpanjang vektor dalam ruangR2 danR3 diberikan oleh√
v21+v2
2 dan√
v21+v2
2+v23.
Dengan demikian panjang vektor‖vvv‖ pada pembahasan sebelumnya adalah
‖vvv‖=√
14.
Perintah untuk menghitung hasil kali titik dan panjang vektor dalam sel SAGE Notebook di-lakukan sebagai berikut:
u=vector(QQ,[4,-2])v=vector(QQ,[3,6])w=vector(QQ,[1,2,3])pretty_print(html("Vektor : $\pmb{u} = %s$"%latex(u.column())))printpretty_print(html("Vektor : $\pmb{v} = %s$"%latex(v.column())))printpretty_print(html("Hasil kali titik : $\pmb{u}\\cdot\pmb{u} =

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 7
%s$"%latex(u.dot_product(v))))printpretty_print(html("Vektor : $\pmb{w} = %s$"%latex(w.column())))printpretty_print(html("Panjang vektor : $|\pmb{w}| = %s$"%latex(w.norm())))
Output yang dihasilkan adalah :
Vektor : uuu=
(4
−2
)
Vektor : vvv=
(36
)
Hasilkalititik : uuu ·vvv= 0
Vektor : www=
123
Panjangvektor: |www|=√
14
Berikut ini diberikan suatu sifat berkenaan dengan dua vektor tegak lurus.
Teorema 1.2.1Dua vektoruuu danvvv di R2 tegak lurus makauuu·vvv= 0.
u
vv−u
O
Gambar 1.6: vektoruuu⊥ vvv
Bukti Misalkan vektoruuu,vvv di R2 denganuuu⊥ vvv sebagaimana diberikan dalam Gambar1.6. Se-lanjutnya, dengan menggunakan dalil Pythagoras didapat
‖uuu‖2+‖vvv‖2 = ‖vvv−uuu‖2
atau
(u21+u2
2)+(v21+v2
2) = (v1−u1)2+(v2−u2)
2
= (u21+u2
2)+(v21+v2
2)−2u1v1−2u2v2.
Jadi−2u1v1−2u2v2 = 0 atau u1v1+u2v2 = 0.
8
Dengan demikianuuu ·vvv= u1v1+u2v2 = 0.
Untuk vektorvvv di ruangRn, panjang vektor mengikuti seperti diR2 atauR3, yaitu
‖vvv‖=√vvv·vvv=√
v21+v2
2+ . . .+v2n
Untuk vektor
uuu=
[25
]
∈ R2
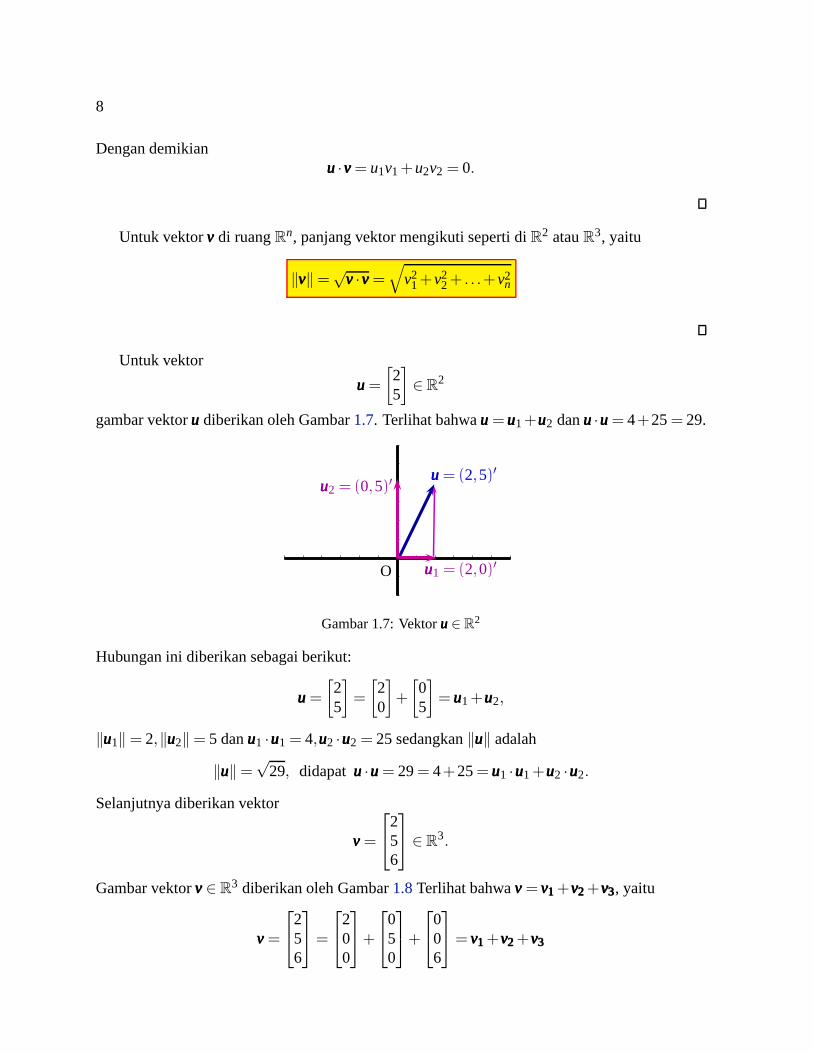
gambar vektoruuu diberikan oleh Gambar1.7. Terlihat bahwauuu= uuu1+uuu2 danuuu·uuu= 4+25= 29.
uuu= (2,5)′
uuu1 = (2,0)′
uuu2 = (0,5)′
O
Gambar 1.7: Vektoruuu∈ R2
Hubungan ini diberikan sebagai berikut:
uuu=
[25
]
=
[20
]
+
[05
]
= uuu1+uuu2,
‖uuu1‖= 2,‖uuu2‖= 5 danuuu1 ·uuu1 = 4,uuu2 ·uuu2 = 25 sedangkan‖uuu‖ adalah
‖uuu‖=√
29, didapatuuu ·uuu= 29= 4+25= uuu1 ·uuu1+uuu2 ·uuu2.
Selanjutnya diberikan vektor
vvv=
256
∈ R3.
Gambar vektorvvv∈ R3 diberikan oleh Gambar1.8Terlihat bahwavvv= v1v1v1+v2v2v2+v3v3v3, yaitu
vvv=
256
=
200
+
050
+
006
= v1v1v1+v2v2v2+v3v3v3
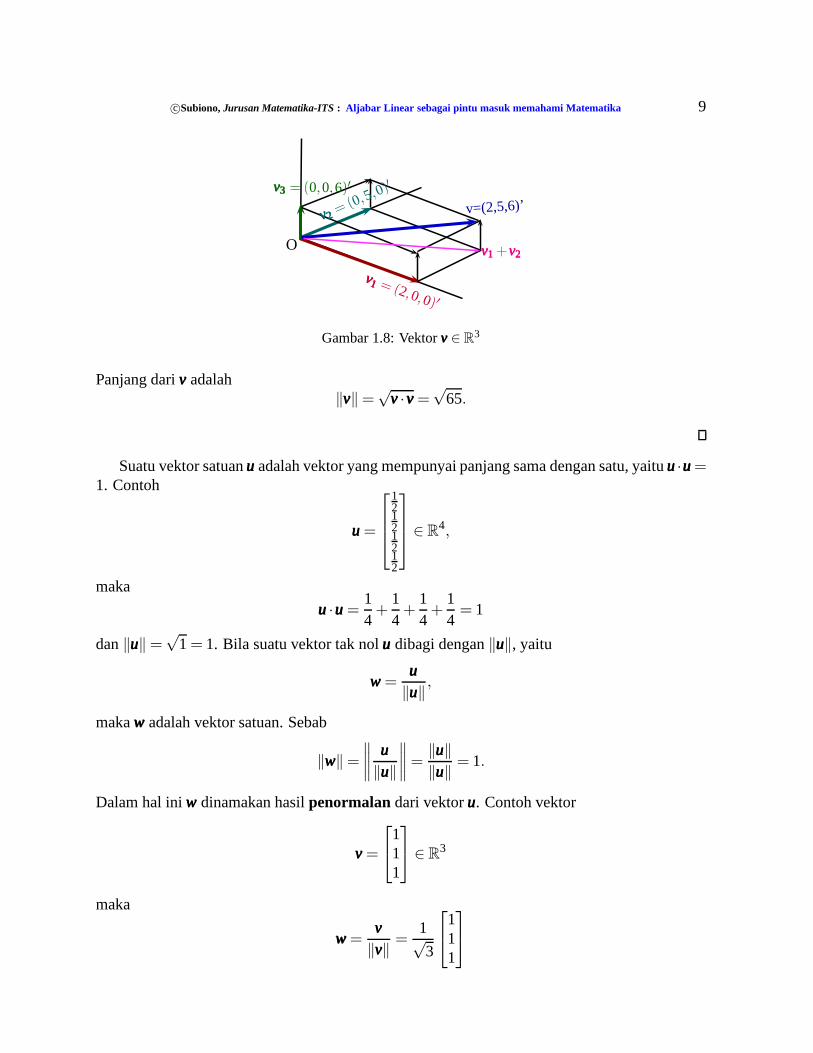
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 9
v=(2,5,6)’
O
v1v1v1 = (2,0,0) ′
v2v2v2=(0,5
,0)′v3v3v3 = (0,0,6)′
v1v1v1+v2v2v2
Gambar 1.8: Vektorvvv∈ R3
Panjang darivvv adalah‖vvv‖=
√vvv·vvv=
√65.
Suatu vektor satuanuuu adalah vektor yang mempunyai panjang sama dengan satu, yaituuuu·uuu=1. Contoh
uuu=
12121212
∈ R4,
maka
uuu·uuu=14+
14+
14+
14= 1
dan‖uuu‖=√
1= 1. Bila suatu vektor tak noluuu dibagi dengan‖uuu‖, yaitu
www=uuu‖uuu‖ ,
makawww adalah vektor satuan. Sebab
‖www‖=∥∥∥∥
uuu‖uuu‖
∥∥∥∥=‖uuu‖‖uuu‖ = 1.
Dalam hal iniwww dinamakan hasilpenormalandari vektoruuu. Contoh vektor
vvv=
111
∈ R3
maka
www=vvv‖vvv‖ =
1√3
111

10
dan‖www‖= 1√3
√3= 1. Perintah dalam sel SAGE Notebook untuk melakukan penormalan vektor
lakukan sebagai berikut:
u=vector(QQ,[1,1,1])w=u/u.norm()pretty_print(html("$\pmb{u} = %s$"%latex(u.column())))printpretty_print(html("$\pmb{w} = %s$"%latex(w.column())))printpretty_print(html("$|\pmb{w}| = %s$"%latex(w.norm())))
Hasil dari perintah tersebut adalah:
vvv=
111
www=
13
√3
13
√3
13
√3
‖www‖= 1
Contoh lain diberikan tiga vektor diR3
iii =
[10
]
, jjj =
[01
]
dan uuu=
[cosθsinθ
]
,
makaiii, jjj danuuu adalah vektor satuan. Bilaθ = 0, makauuu = iii dan bilaθ = π2, makauuu = jjj.
Gambar1.9adalah gambar vektor satuaniii, jjj danuuu.
θ
uuu= (cosθ,sinθ)′
iii = (1,0)′
jjj = (0,1)′
O
Gambar 1.9: Vektor satuaniii, jjj danuuu
Untuk sebarang sudutθ vektor
uuu=
[cosθsinθ
]

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 11
memberikanuuu ·uuu= 1, sebab cos2 θ+sin2 θ = 1. Perhatikan bahwauuu · iii = cosθ danuuu · jjj = sinθ.Setiap vektor
vvv=
[xy
]
∈ R2
merupakan kombinasi linear dari vektoriii dan jjj , sebab
vvv=
[xy
]
= x
[10
]
+y
[01
]
= xiii +yjjj.
Untuk sebarang vektorvvv di R3, merupakan kombinasi linear dari vektoriii, jjj dankkk dengan masing-masing vektoriii, jjj dankkk adalah
iii =
100
, jjj =
010
dan kkk=
001
dengan demikian untuk untuk setiap
vvv=
xyz
di R3
didapat
vvv=
xyz
= x
100
+y
010
+z
001
= xiii +yjjj +zkkk.
Berikut ini diberikan beberapa sifat hasil kali titik.
Teorema 1.2.2Bila uuu,vvv danwww di R2 dan skalarc di R, maka
(i.) (uuu+vvv) ·www= uuu·www+vvv·www,
(ii.) (cuuu) ·vvv= c(uuu ·vvv),
(iii.) uuu ·vvv= vvv·uuu.
Bukti Misalkan
uuu=
[u1
u2
]
, vvv=
[v1
v2
]
dan www=
[w1
w2
]
.
(i.) Maka
uuu+vvv=
[u1+v1
u2+v2
]
dan
(uuu+vvv) ·www = (u1+v1)w1+(u2+v2)w2
= u1w1+v1w1+u2w2+v2w2
= (u1w1+u2w2)+(v1w1+v2w2) = uuu ·www+vvv ·www.

12
(ii.) Karena
cuuu=
[cu1
cu2
]
, maka
(cuuu) ·vvv= cu1v1+cu2v2 = c(u1v1+u2v2) = c(uuu ·vvv).
(iii.) Jelas sebab perkalian dua bilangan real adalah komutatif.
Sifat berikut berkenaan dengan pertaksamaan Schwarz yaitu
‖uuu·vvv‖ ≤ ‖uuu‖‖vvv‖.
Bukti: untuk sebarang bilangan realx dan menggunakan hasil Teorema1.2.2didapat
0 ≤ (xuuu+vvv) · (xuuu+vvv)
= x2(uuu·uuu)+2x(uuu ·vvv)+(vvv·vvv)= ‖uuu‖2x2+2(uuu·vvv)x+‖vvv‖2.
Misalkana= ‖uuu‖2,b= 2(uuu·vvv) danc= ‖vvv‖2, didapat
0≤ ax2+bx+c.
Hal ini berarti bahwa bentuk kuadrat tsb. tidak mempunyai akar-akar real kecuali nol, yaituekivalen dengan
b2−4ac≤ 0 atau b2≤ 4ac.
Jadi4(uuu·vvv)2≤ 4‖uuu‖2‖vvv‖2 atau |uuu·vvv| ≤ ‖uuu‖‖vvv‖.
Pertaksamaan Minkowski:‖uuu+vvv‖ ≤ ‖uuu‖+‖vvv‖.
Bukti: dengan menggunakan pertaksamaan Schwarz dan sifat-sifat sebelumnya didapat
‖uuu+vvv‖2 = (uuu+vvv) · (uuu+vvv) = ‖uuu‖2+2(uuu·vvv)+‖vvv‖2≤ ‖uuu‖2+2‖uuu‖‖vvv‖+‖vvv‖2= (‖uuu‖+‖vvv‖)2.
Jadi‖uuu+vvv‖ ≤ ‖uuu‖+‖vvv‖.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 13
O
uuu vvv
vvv−uuu
θ
Gambar 1.10: Sudut diantara dua vektoruuu danvvv.
Berikut ini diberikan hubungan sudut diantara dua vektor dengan hasil kali titik. Misalkanvektoruuu danvvv membentuk sudut sebesarθ sebagaimana diberikan oleh Gambar1.10. Denganmenggunakan aturan kosinus didapat
‖vvv−uuu‖2 = ‖uuu‖2+‖vvv‖2−2‖uuu‖‖vvv‖cosθ
atau
(vvv−uuu) · (vvv−uuu) = ‖uuu‖2+‖vvv‖2−2‖uuu‖‖vvv‖cosθ‖vvv‖2+‖uuu‖2−2(uuu·vvv) = ‖uuu‖2+‖vvv‖2−2‖uuu‖‖vvv‖cosθ.
Didapatcosθ = uuu·vvv
‖uuu‖‖vvv‖ .
Hasil sifat-sifat yang telah dibahas berlaku juga untuk vektor di ruangRn. Contoh-contoh:
1. Dapatkan nilaix dany di R yang memenuhi[
x3
]
=
[2
x+y
]
.
Jawab: nilaix dany yang memenuhi adalah
x= 2 dan 3= x+y ⇒ x= 2 dan y= 1.
2. Diberikan vektor
uuu=
541
,vvv=
1−23
,
dapatkanuuu ·vvv dan simpulkan hasilnya.Jawab:uuu ·vvv= 5−8+3= 0. Jadiuuu⊥ vvv.

14
3. Untuk vektor
uuu=
1x−3
dan vvv=
2−54
,
tentukan nilaix∈ R supayauuu⊥ vvv.Jawab:uuu⊥ vvv, makauuu ·vvv= 2−5x−12= 0. Didapat−5x= 10⇒ x=−2.
4. Misalkan
uuu=
1−34
dan vvv=
347
.
Bila θ adalah sudut antarauuu danvvv, maka hitung cosθ.Jawab:
cosθ =uuu ·vvv‖uuu‖‖vvv‖ =
19√26√
74.
Perintah penghitungan sudut diantara dua vektor dalam Maxima dilakukan sebagai berikut:
(%i60) uv:u=columnvector([1,-3,4]); vv:v=columnvector([3,4,7]);print( cos(theta),"=",dotproduct(rhs(uv),rhs(vv))/(mat_norm(rhs(uv),frobenius)*mat_norm(rhs(vv),frobenius)))$
(%o60) u=
1−34
(%o61) v=
347
, cos(θ) =19√
26√
74
Latihan
Latihan 1.2.1 Tentukan mana vektor-vektor berikut yang sama
u=
123
,v=
231
,w=
132
dan x=
231
.
Latihan 1.2.2 Diberikan vektor
u=
2−71
,v=
−304
dan w=
058
.
Dapatkan

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 15
(a) 3u-5v.
(b) 2u+5v-7w.
Latihan 1.2.3 Dapatkan u·v untuk
(a) u=
1−54
dan v=
8−23
.
(b) u=
42−3−1
dan v=
26−38
.
Latihan 1.2.4 Selidiki pasangan vektor-vektor berikut
u=
541
,v=
3−41
dan w=
1−23
yang tegak lurus.
Latihan 1.2.5 Dapatkan k sehingga vektor u dan v tegak lurus, untuk
(a) u=
1k−3
dan v=
2−54
.
(b) u=
6−1372k
dan v=
23k−415
.
Latihan 1.2.6 Tentukan nilai x supaya‖u‖=√
39 untuk
u=
1k−25
.
Latihan 1.2.7 Diberikan vektor

16
(a) u=
3−12−4
,
(b) u=
2−38−7
.
Hitung‖u‖.
Latihan 1.2.8 Normalkan vektor
(a) u=
[3−4
]
,
(b) v=
4−2−38
,
(c) w=
1223−1
4
.
Latihan 1.2.9 Hitungcosθ bila θ adalah sudut diantara dua vektor
(a) u=
1−2−5
dan
243
,
(b) u=
12−53
dan
−12−36
.
Bab 2Sistem Persamaan Linear
Dalam bab ini dibahas Sistem Persamaan Linear (SPL) dan Matriks. Pembahasan dimulai dariSistem Persamaan Linear yang disajikan dalam Bagian2.1. Pembahasan dilajutkan meyelidikipenyelesaian dari sistem persamaan diberikan dalam Bagian2.2.
Pengertian mengenai matriks diberikan dalam bagian2.4 dilajutkan dengan Aritmatika danOperasi Matriks yang diberikan dalam Bagian2.5 diikuti oleh Sifat-sifat Aritmatika Matriksdiberikan dalam Bagian2.7.
Pengertian Matriks Invers dan Matriks Elementer diberikandalam Bagian2.8sedangkan caramemperoleh matriks invers dibahas dalam bagian2.9.
Hal-hal yang berkaitan dengan Matriks-matriks Khusus diberikan dalam Bagian2.6 danpendekomposisian matriks menjadi matriks segitiga atas dan segitiga bawah disajikan dalamBagian2.10. Dalam bab ini diakhiri oleh pembahasan mengenai peninjauan ulang sistem per-samaan yang diberikan dalam Bagian2.11.
2.1 Sistem Persamaan
Suatu sistem persamaan linear adalah suatu himpunan dari persamaan yang memuat satu ataulebih peubah. Disini Pembahasan dikhususkan untuk sistem persamaan linear yang dimulai olehdua persamaan dengan dua peubah dan tiga persamaan dengan tiga peubah. Selanjutnya secaramudah pembahasannya diperluas untuk sistem persamaan linear yang persamaannya lebih daritiga.
Berikut ini diberikan bentuk persamaan liner dengan dua peubah yaitu
a1x+b1y= c1
a2x+b2y= c2
}
(2.1)
dimana konstanta/skalara1,a2,b1,b2 danc1,c2 berada di himpunan bilangan realR sedangkanx dany adalah peubah dengan pengecualian bahwa masing-masing persamaan setidaknya mem-punyai satu peubah. Pada bagian ini dibahas
17
18
• Kajian gambar dari baris : persamaan,
• Kajian gambar dari kolom : bentuk matriks.
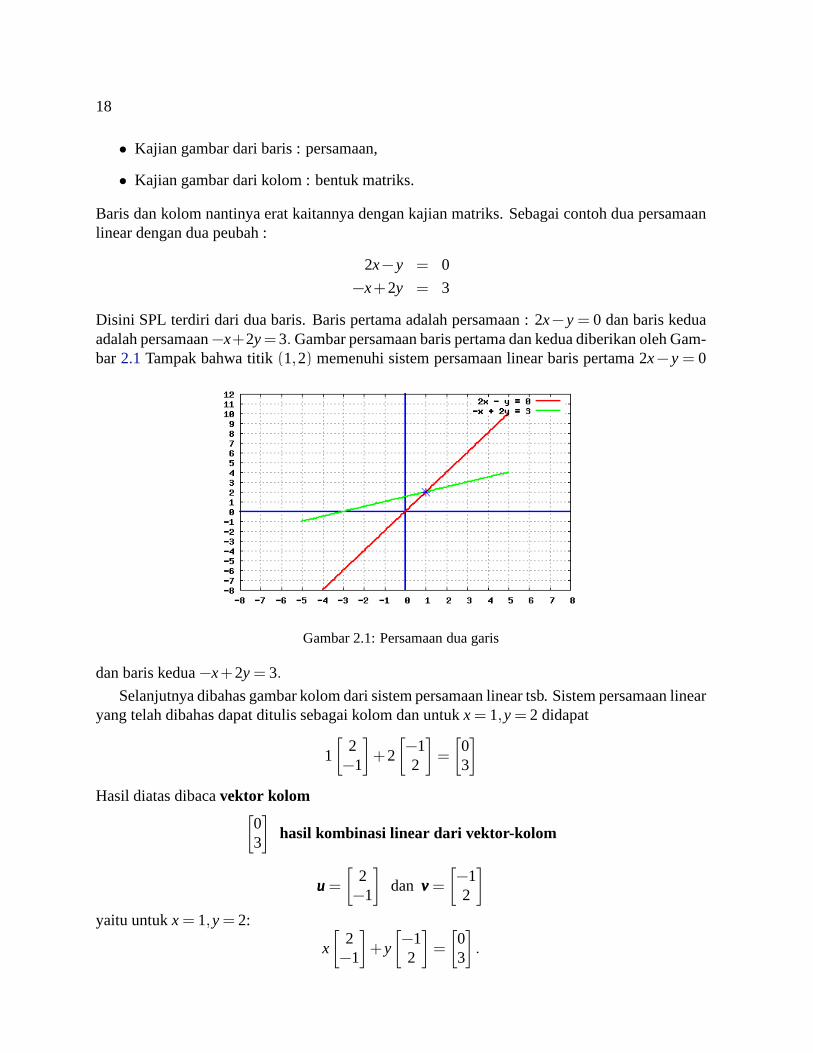
Baris dan kolom nantinya erat kaitannya dengan kajian matriks. Sebagai contoh dua persamaanlinear dengan dua peubah :
2x−y = 0
−x+2y = 3
Disini SPL terdiri dari dua baris. Baris pertama adalah persamaan : 2x−y= 0 dan baris keduaadalah persamaan−x+2y= 3. Gambar persamaan baris pertama dan kedua diberikan oleh Gam-bar2.1 Tampak bahwa titik(1,2) memenuhi sistem persamaan linear baris pertama 2x− y= 0
Gambar 2.1: Persamaan dua garis
dan baris kedua−x+2y= 3.
Selanjutnya dibahas gambar kolom dari sistem persamaan linear tsb. Sistem persamaan linearyang telah dibahas dapat ditulis sebagai kolom dan untukx= 1,y= 2 didapat
1
[2−1
]
+2
[−12
]
=
[03
]
Hasil diatas dibacavektor kolom[03
]
hasil kombinasi linear dari vektor-kolom
uuu=
[2−1
]
dan vvv=
[−12
]
yaitu untukx= 1,y= 2:
x
[2−1
]
+y
[−12
]
=
[03
]
.
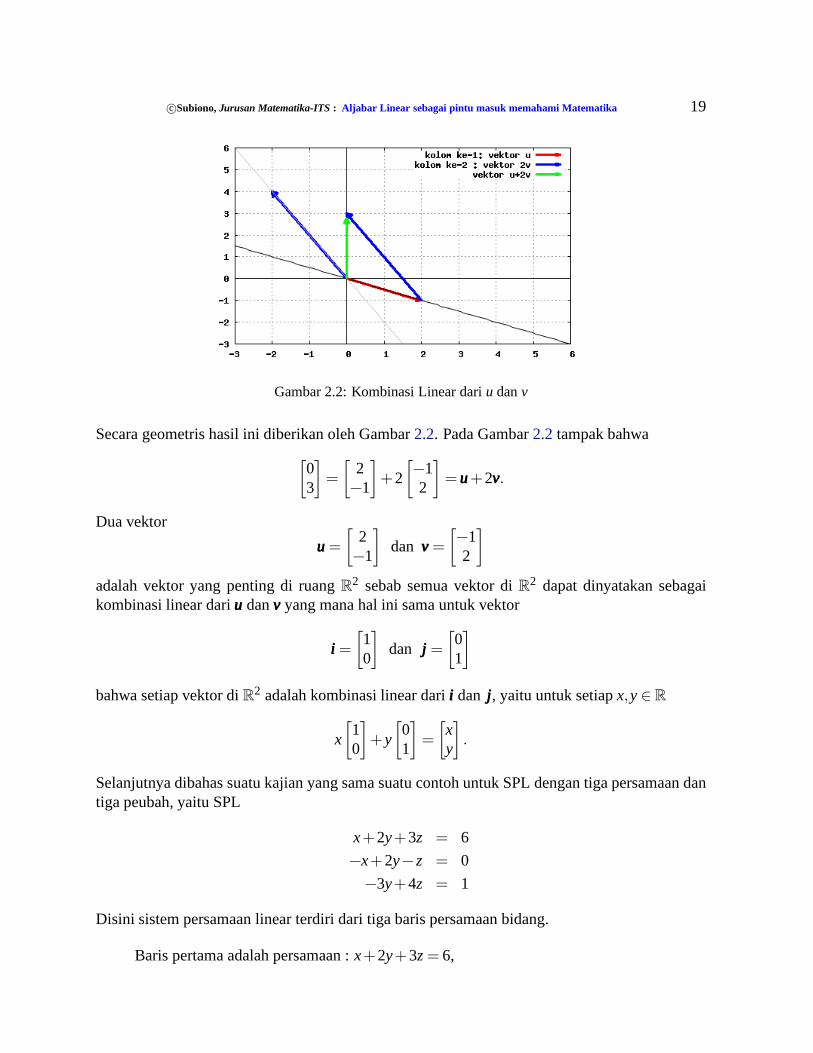
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 19
Gambar 2.2: Kombinasi Linear dariu danv
Secara geometris hasil ini diberikan oleh Gambar2.2. Pada Gambar2.2tampak bahwa[03
]
=
[2−1
]
+2
[−12
]
= uuu+2vvv.
Dua vektor
uuu=
[2−1
]
dan vvv=
[−12
]
adalah vektor yang penting di ruangR2 sebab semua vektor diR2 dapat dinyatakan sebagaikombinasi linear dariuuu danvvv yang mana hal ini sama untuk vektor
iii =
[10
]
dan jjj =
[01
]
bahwa setiap vektor diR2 adalah kombinasi linear dariiii dan jjj, yaitu untuk setiapx,y∈ R
x
[10
]
+y
[01
]
=
[xy
]
.
Selanjutnya dibahas suatu kajian yang sama suatu contoh untuk SPL dengan tiga persamaan dantiga peubah, yaitu SPL
x+2y+3z = 6
−x+2y−z = 0
−3y+4z = 1
Disini sistem persamaan linear terdiri dari tiga baris persamaan bidang.
Baris pertama adalah persamaan :x+2y+3z= 6,
20
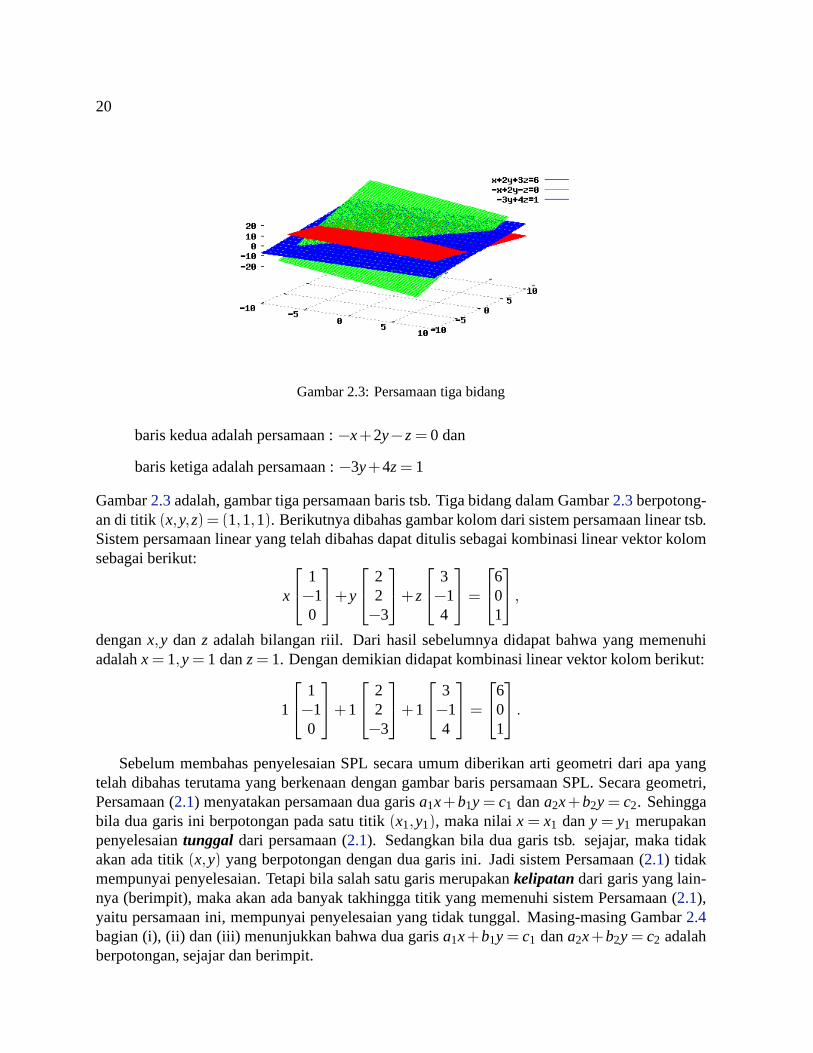
Gambar 2.3: Persamaan tiga bidang
baris kedua adalah persamaan :−x+2y−z= 0 dan
baris ketiga adalah persamaan :−3y+4z= 1
Gambar2.3adalah, gambar tiga persamaan baris tsb. Tiga bidang dalam Gambar2.3berpotong-an di titik (x,y,z) = (1,1,1). Berikutnya dibahas gambar kolom dari sistem persamaan linear tsb.Sistem persamaan linear yang telah dibahas dapat ditulis sebagai kombinasi linear vektor kolomsebagai berikut:
x
1−10
+y
22−3
+z
3−14
=
601
,
denganx,y danz adalah bilangan riil. Dari hasil sebelumnya didapat bahwa yang memenuhiadalahx= 1,y= 1 danz= 1. Dengan demikian didapat kombinasi linear vektor kolom berikut:
1
1−10
+1
22−3
+1
3−14
=
601
.
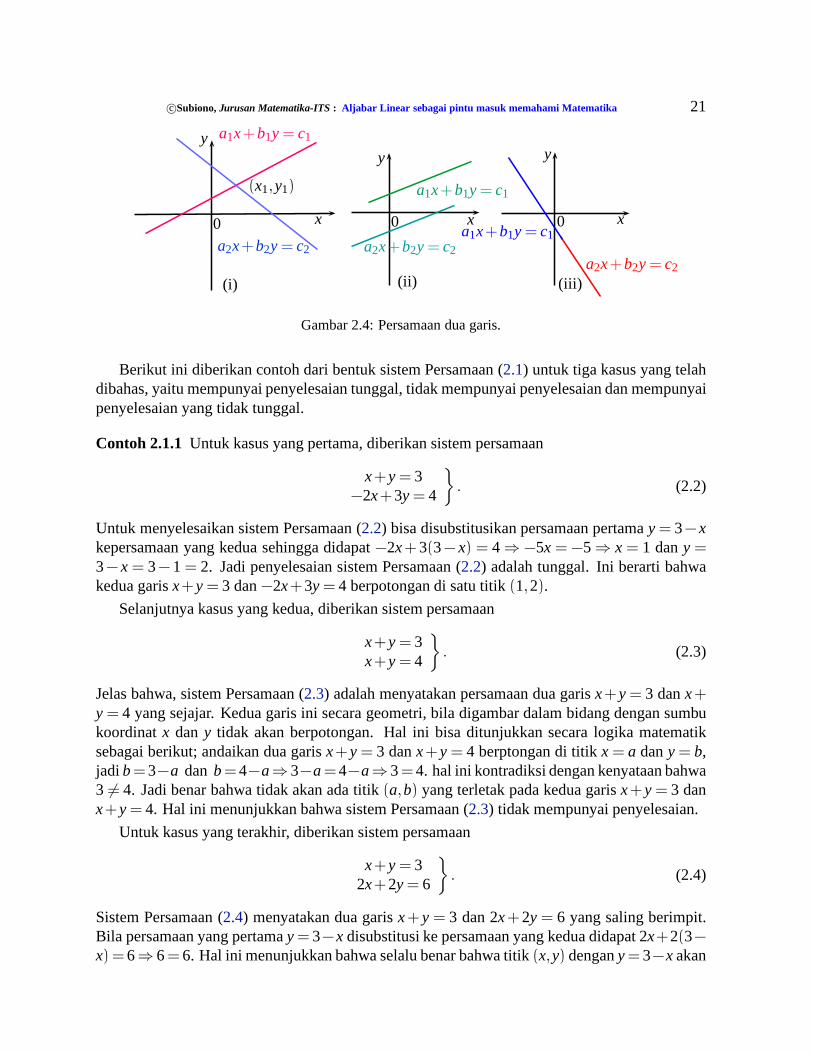
Sebelum membahas penyelesaian SPL secara umum diberikan arti geometri dari apa yangtelah dibahas terutama yang berkenaan dengan gambar baris persamaan SPL. Secara geometri,Persamaan (2.1) menyatakan persamaan dua garisa1x+b1y= c1 dana2x+b2y= c2. Sehinggabila dua garis ini berpotongan pada satu titik(x1,y1), maka nilaix= x1 dany= y1 merupakanpenyelesaiantunggal dari persamaan (2.1). Sedangkan bila dua garis tsb. sejajar, maka tidakakan ada titik(x,y) yang berpotongan dengan dua garis ini. Jadi sistem Persamaan (2.1) tidakmempunyai penyelesaian. Tetapi bila salah satu garis merupakankelipatandari garis yang lain-nya (berimpit), maka akan ada banyak takhingga titik yang memenuhi sistem Persamaan (2.1),yaitu persamaan ini, mempunyai penyelesaian yang tidak tunggal. Masing-masing Gambar2.4bagian (i), (ii) dan (iii) menunjukkan bahwa dua garisa1x+b1y= c1 dana2x+b2y= c2 adalahberpotongan, sejajar dan berimpit.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 21
a1x+b1y= c1
a2x+b2y= c2
(x1,y1)
x
y
0 0
a1x+b1y= c1
a2x+b2y= c2
x
y
0 x
y
a1x+b1y= c1
a2x+b2y= c2
(i) (ii) (iii)
Gambar 2.4: Persamaan dua garis.
Berikut ini diberikan contoh dari bentuk sistem Persamaan (2.1) untuk tiga kasus yang telahdibahas, yaitu mempunyai penyelesaian tunggal, tidak mempunyai penyelesaian dan mempunyaipenyelesaian yang tidak tunggal.
Contoh 2.1.1 Untuk kasus yang pertama, diberikan sistem persamaan
x+y= 3−2x+3y= 4
}
. (2.2)
Untuk menyelesaikan sistem Persamaan (2.2) bisa disubstitusikan persamaan pertamay= 3−xkepersamaan yang kedua sehingga didapat−2x+3(3− x) = 4⇒ −5x = −5⇒ x = 1 dany =
3− x= 3−1= 2. Jadi penyelesaian sistem Persamaan (2.2) adalah tunggal. Ini berarti bahwakedua garisx+y= 3 dan−2x+3y= 4 berpotongan di satu titik(1,2).
Selanjutnya kasus yang kedua, diberikan sistem persamaan
x+y= 3x+y= 4
}
. (2.3)
Jelas bahwa, sistem Persamaan (2.3) adalah menyatakan persamaan dua garisx+y= 3 danx+y= 4 yang sejajar. Kedua garis ini secara geometri, bila digambar dalam bidang dengan sumbukoordinatx dany tidak akan berpotongan. Hal ini bisa ditunjukkan secara logika matematiksebagai berikut; andaikan dua garisx+y= 3 danx+y= 4 berptongan di titikx= a dany= b,jadib= 3−a dan b= 4−a⇒3−a= 4−a⇒3= 4. hal ini kontradiksi dengan kenyataan bahwa3 6= 4. Jadi benar bahwa tidak akan ada titik(a,b) yang terletak pada kedua garisx+y= 3 danx+y= 4. Hal ini menunjukkan bahwa sistem Persamaan (2.3) tidak mempunyai penyelesaian.
Untuk kasus yang terakhir, diberikan sistem persamaan
x+y= 32x+2y= 6
}
. (2.4)
Sistem Persamaan (2.4) menyatakan dua garisx+ y = 3 dan 2x+2y= 6 yang saling berimpit.Bila persamaan yang pertamay= 3−x disubstitusi ke persamaan yang kedua didapat 2x+2(3−x) = 6⇒ 6= 6. Hal ini menunjukkan bahwa selalu benar bahwa titik(x,y) dengany= 3−x akan
22
selalu memenuhi sistem Persamaan (2.4). Jadi ada banyakx dany yang memenuhi Persamaan(2.4). Himpunan semua titik(x,y) yang memenuhi Persamaan (2.4) adalah{(x,y) |y= 3−x, x∈R}, misalnya titik(0,3),(1,2) dan(−1,4) adalah titik-titik yang memenuhi sistem Persamaan(2.4).
Bahasan berikut adalah berkaitan dengan sistem persamaan linear yang terdiri dari tiga per-samaan dengan tiga peubah, yaitu
ax+by+cz= pdx+ey+ f z= qgx+hy+ iz= r
(2.5)
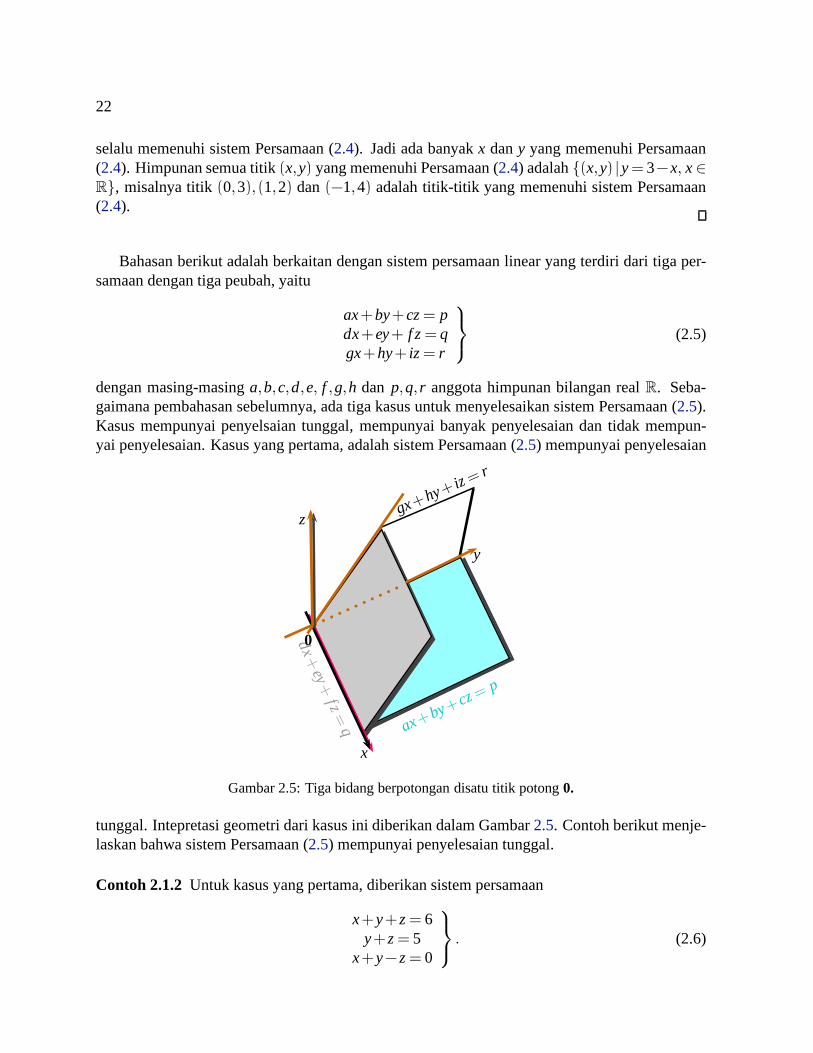
dengan masing-masinga,b,c,d,e, f ,g,h dan p,q, r anggota himpunan bilangan realR. Seba-gaimana pembahasan sebelumnya, ada tiga kasus untuk menyelesaikan sistem Persamaan (2.5).Kasus mempunyai penyelsaian tunggal, mempunyai banyak penyelesaian dan tidak mempun-yai penyelesaian. Kasus yang pertama, adalah sistem Persamaan (2.5) mempunyai penyelesaian
x
y
z
ax+by+
cz=p
dx+
ey+f z=
q
gx+hy+
iz=r
0
Gambar 2.5: Tiga bidang berpotongan disatu titik potong0.
tunggal. Intepretasi geometri dari kasus ini diberikan dalam Gambar2.5. Contoh berikut menje-laskan bahwa sistem Persamaan (2.5) mempunyai penyelesaian tunggal.
Contoh 2.1.2 Untuk kasus yang pertama, diberikan sistem persamaan
x+y+z= 6y+z= 5
x+y−z= 0
. (2.6)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 23
Untuk menyelesaikan sistem Persamaan (2.6) bisa disubstitusikan persamaan pertamaz= 6−x−y kepersamaan yang kedua sehingga didapaty+6−x−y= 5⇒ x= 1. Untukx= 1, persamaanpertama dan ketiga menjadi sistem persamaan
y+z= 5y−z=−1
}
.
Dari sistem persamaan ini, didapaty= 2,z= 3. Jadi penyelesaian sistem Persamaan (2.6) adalahx= 1,y= 2 danz= 3. Tafsiran geometri dari kasus ini tiga bidangx+y+z= 6,y+z= 5 danx+y−z= 0 berpotongan hanya di satu titik(1,2,3).
x
y
z
ax+by+cz= p
dx+ey+
f z=q
gx+hy+ iz= r
g : garis potong
Gambar 2.6: Tiga bidang berpotongan disatu garis potongg.
Kasus yang kedua, adalah sistem Persamaan (2.5) mempunyai penyelesaian banyak . Intepretasigeometri dari kasus ini diberikan dalam Gambar2.6. Contoh berikut menjelaskan bahwa sistemPersamaan (2.5) mempunyai penyelesaian banyak.
Contoh 2.1.3 Untuk kasus yang kedua, diberikan sistem persamaan
x+y+z= 6x+y= 2
2x+2y−z= 0
. (2.7)
Untuk menyelesaikan sistem Persamaan (2.7) bisa disubstitusikan persamaan keduax+ y = 2kepersamaan yang pertamax+ y+ z= 6 sehingga didapat 2+ z= 6⇒ z= 4. Untuk z= 4,semua persamaan dalam sistem Persamaan (2.7) menjadi persamaanx+y= 2. Hal, ini menje-laskan bahwa ketiga bidangx+y+z= 6, x+y= 2 dan 2x+2y−z= 0 berpotongan pada satugarisg yang diberikan oleh persamaanz= 4, x+ y = 2. Semua titik yang berada pada garisini merupakan penyelesaian sistem Persamaan (2.7). Jadi himpunan penyelesaiannya adalah{(x,y,z) | z= 4,x+ y = 2}. Beberapa penyelesaian sistem Persamaan (2.7) adalahx = 0, y =
2, z= 4; x= 1, y= 1, z= 4 danx= −1, y= 3, z= 4.
24
g1 : garis potong
g2 : garis potong
g3 : garis potong
x
y
z
0 ax+by+cz= p
gx+hy+ iz= r
dx+ey+ f z= q
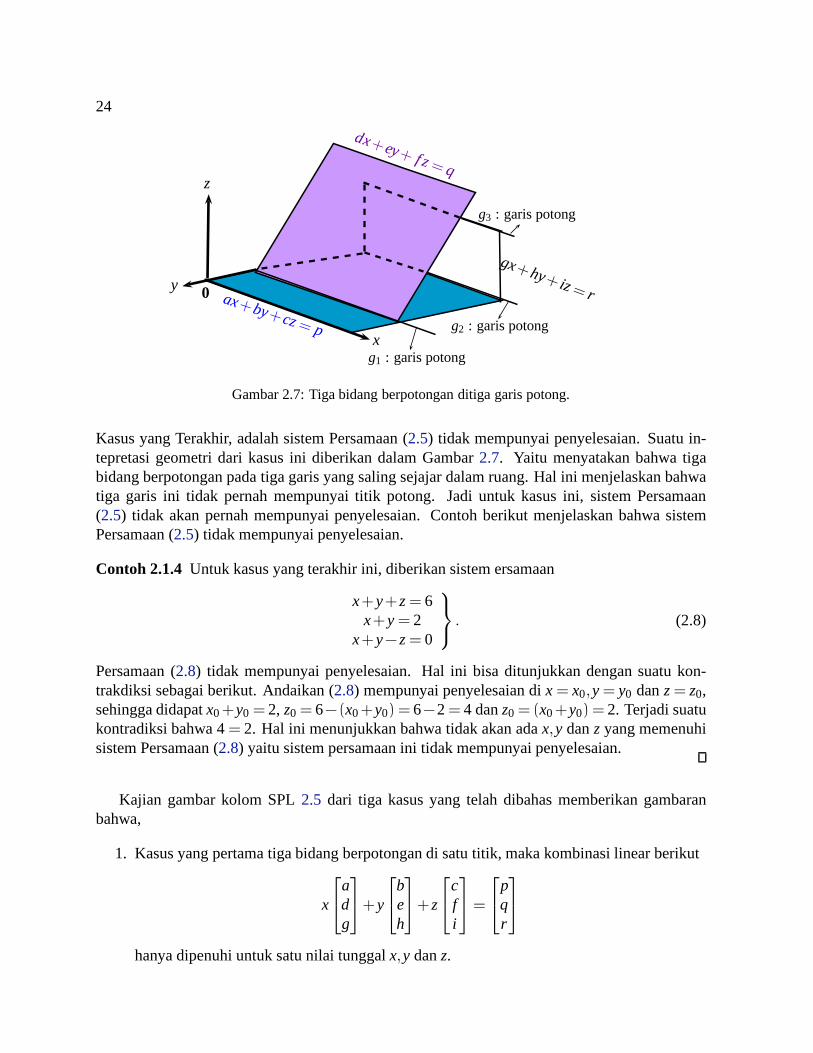
Gambar 2.7: Tiga bidang berpotongan ditiga garis potong.
Kasus yang Terakhir, adalah sistem Persamaan (2.5) tidak mempunyai penyelesaian. Suatu in-tepretasi geometri dari kasus ini diberikan dalam Gambar2.7. Yaitu menyatakan bahwa tigabidang berpotongan pada tiga garis yang saling sejajar dalam ruang. Hal ini menjelaskan bahwatiga garis ini tidak pernah mempunyai titik potong. Jadi untuk kasus ini, sistem Persamaan(2.5) tidak akan pernah mempunyai penyelesaian. Contoh berikutmenjelaskan bahwa sistemPersamaan (2.5) tidak mempunyai penyelesaian.
Contoh 2.1.4 Untuk kasus yang terakhir ini, diberikan sistem ersamaan
x+y+z= 6x+y= 2
x+y−z= 0
. (2.8)
Persamaan (2.8) tidak mempunyai penyelesaian. Hal ini bisa ditunjukkan dengan suatu kon-trakdiksi sebagai berikut. Andaikan (2.8) mempunyai penyelesaian dix= x0,y= y0 danz= z0,sehingga didapatx0+y0 = 2, z0 = 6−(x0+y0) = 6−2= 4 danz0 = (x0+y0) = 2. Terjadi suatukontradiksi bahwa 4= 2. Hal ini menunjukkan bahwa tidak akan adax,y danz yang memenuhisistem Persamaan (2.8) yaitu sistem persamaan ini tidak mempunyai penyelesaian.
Kajian gambar kolom SPL2.5 dari tiga kasus yang telah dibahas memberikan gambaranbahwa,
1. Kasus yang pertama tiga bidang berpotongan di satu titik,maka kombinasi linear berikut
x
adg
+y
beh
+z
cfi
=
pqr
hanya dipenuhi untuk satu nilai tunggalx,y danz.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 25
2. Kasus yang kedua tiga bidang berpotongan di satu garis potongg, maka kombinasi linearberikut
x
adg
+y
beh
+z
cfi
=
pqr
dipenuhi untuk beberapa nilaix,y danz.
3. Kasus yang ketiga, tiga bidang berpotongan di tiga garis,maka tidak ada nilaix,y dancyang memenuhi kombinasi linear berikut
x
adg
+y
beh
+z
cfi
=
pqr
.
Sebegitu jauh apa yang telah dibahas dalam bagian ini hanyalah sebagai awal bahasan sis-tem persamaan linear. Telah diuraikan bahwa dalam awal bagian ini, diberikan contoh-contohsistem linear serta menyelesaikan sistem persamaan ini danmemberikan arti geometri dari sis-tem persamaan linear yang dibahas dalam beberapa kasus yangumum yaitu, sistem persamaanlinear mempunyai penyelesaian tunggal, mempunyai banyak penyelesaian dan tidak mempunyaipenyelesaian. Pembahasan dimulai dengan sistem persamaanlinear dengan dua persamaan dandua peubah dan dilanjutkan dengan tiga persamaan dengan tiga peubah. Yaitu banyaknya per-samaan dengan banyaknya yang ditanyakan adalah sama. Cara menyelesaikan sistem linear yangtelah dibahas ini menggunakan substitusi yang banyak dikenal sbelumnya. Untuk contoh-contohyang telah dibahas masih memungkinkan menggunakan cara substitusi, tetapai untuk masalahyang lebih umum dan rumit tentunya hal ini tidak memadai/mudah menggunakan cara substitusiuntuk menyelesaikannya. Untuk itu, dalam Bab2.2yang dibahas berikutnya, akan dijelaskan se-cara rinci cara untuk menyelesiakan sistem persamaan linear yang lebih umum dari pembahasansebelumnya.
Sebagai akhir dari bagian ini diberikan beberapa latihan soal. Latihan soal ini diberikan agarsupaya menambah kemampuan dasar menyelesiakan sistem persamaan linear teridiri dari duapersamaan dengan dua peubah serta tiga persamaan dengan tiga peubah.
Latihan
Latihan 2.1.1 Selesaikan sistem persamaan berikut serta berikan arti geometrinya.
a).
{x+y= 7
2x+4y= 18b).
{x+2y= 33x+6y= 3
c).
{2x−5y=−2−4x+10y= 4
Latihan 2.1.2 Diberikan sistem persamaan
a).
{ax+by= 6
3ax+2by= 3b).
{ax+by= 6x+2y= 3
c).
{x−ay= 83x+6y= b
Tentukan semua nilai dari a dan b supaya :

26
i. sistem persamaana) mempunyai penyelesaian tunggal
ii. sistem persamaanb) tidak mempunyai penyelesaian
iii. sistem persamaanc) mempunyai banyak penyelesaian.
Latihan 2.1.3 Selesaikan sistem persamaan berikut serta berikan arti geometrinya.
a).
x+2y+2z= 4x+3y= 5
2x+6y+5z= 6b).
x−y+2z= 12x+y+z= 8
x+y= 5c).
x+2y+3z= 14x+5y+6z= 27x+8y+9z= 3
2.2 Menyelesaikan Sistem Persamaan
Dalam bagian ini dibahas suatu sistem persamaan linear terdiri dari m persamaan dengannpeubah untuk tiga halm lebih besar darin, msama dengann danm lebih kecil darin. Selanjutnyadiberikan cara untuk menyelesikan sistem persamaan linearini dengan metodeeliminasi GaussdanGauss-Jordan. Kemudian dibahas hal-hal dasar yang digunakan untuk menyelesaikan sis-tem persamaan meliputi matriks diperbesar (augmented matrix) serta operasi baris.
Bentuk sistem persamaan linear yang mempunyaim persamaan dengann peubah diberikanoleh persamaan
a1,1x1+a1,2x2+ · · ·+a1,nxn = b1
a2,1x1+a2,2x2+ · · ·+a2,nxn = b2...
ai,1x1+ai,2x2+ · · ·+ai,nxn = bi...
a j ,1x1+a j ,2x2+ · · ·+a j ,nxn = b j...
am,1x1+am,2x2+ . . .+am,nxn = bm
(2.9)
Ada tiga macam himpunan penyelesaian dari sistem persamaan(2.9) yaitu, pertama himpunandengan satu anggota yang menyatakan sistem persamaan (2.9) mempunyai penyelesaian tunggal,kedua himpunan dengan tak-hingga banyak anggota yang menyatakan sistem persamaan (2.9)mempunyai banyak penyelesaian. Dalam hal sistem persamaan(2.9) mempunyai penyelesaiandinamakankonsisten. Ketiga, himpunan kosong yang menyatakan sistem persamaan(2.9) tidakmempunyai penyelesaian. Dalam hal ini sistem persamaan (2.9) disebuttidak konsisten. Duasistem persamaan linear dengan banyak persamaan dan banyakpeubah sama dikatakanekivalenbila kedua sistem persamaan linear tsb. yang satubisa diperolehdari persamaan yang lain-nya dan mempunyai himpunan penyelesian yang sama. Sistem persamaan linier (2.9) dikatakan

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 27
mempunyai penyelesaianbila ada(r1, r2, . . . , rn) ∈ Rn yang memenuhi
a1,1r1+a1,2r2+ · · ·+a1,nrn = b1
a2,1r1+a2,2r2+ · · ·+a2,nrn = b2...
ai,1r1+ai,2r2+ · · ·+ai,nrn = bi...
a j ,1r1+a j ,2r2+ · · ·+a j ,nrn = b j...
am,1r1+am,2r2+ . . .+am,nxn = bm
(2.10)
Dua persamaan linearx+y= 1 (2.11)
dan2x+2y= 2 (2.12)
adalah ekivalen sebab persamaan (2.12) bisa diperoleh dengan mengalikan 2 pada kedua ruaspersamaan (2.11) dan himpunan penyelesian dari persamaan (2.11) adalah
S1 = {(x,y) |y= 1−x,x∈ R}
sedangkan himpunan penyelesian dari persamaan (2.12) adalah
S2 = {(x,y) |2y= 2−2x,x∈ R}= {(x,y) |y= 1−x,x∈ R}.
Terlihat bahwaS1 = S2, jadi persamaan (2.11) ekivalen dengan persamaan (2.12). Begitu jugadua sistem persamaan berikut adalah ekivalen
{x+y= 22x−5y=−3
(2.13)
dan {2x−5y=−3x+y= 2
(2.14)
sebab persamaan (2.14) bisa diperoleh dari persamaan (2.13), yaitu menukar persamaan yangpertama dengan persamaan yang kedua dan sebaliknya dalam persamaan (2.13). Bisa diselidikibahwa kedua persamaan mempunyai peyelesaianx= 1 dany= 1. Selanjutnya, persamaan (2.13)dan persamaa
{x+y= 2
−7y=−7(2.15)
adalah ekivalen, sebab persamaan (2.15) dapat diperoleh dari persamaan (2.13), yaitu persamaankedua dalam persamaan (2.15) diperoleh dari kedua ruas persamaan pertama (2.13) dikalikandengan−2 dan hasilnya ditambahkan pada persamaan kedua dari persamaan (2.13). Jelas bahwa
28
persamaan (2.15) mempunyai penyelesaiany= 1 danx= 1 yang sama dengan penyelesaian daripersamaan (2.13).
Pengertian sistem persamaan linear ekivelen ini berguna untuk menyelesaikan sistem per-samaan (2.9) terutama pada saat menggunakan cara eleminasi Gauss. Padadasarnya metodeeliminasi Gauss adalah suatu cara dari transformasi suatu sistem persamaan linear menjadi suatusistem persamaan linear lainya yang lebih sederhana lewat pengeleminasian peubah, tetapi ke-duanya ekivalen. Cara pengeliminasian ini meliputi tiga operasi sederhana yang mentransformasisatu sistem persamaan ke sistem persamaan lainnya yang ekivalen.
Untuk menjelaskan operasi ini, misalkanPk menyatakan persamaan ke-k dalam persamaan(2.9), yaitu
Pk : ak,1x1+ak,2x2+ · · ·+ak,nxn = bk
dengan 1≤ k≤m dan ditulis sistem persamaan linear (2.9) sebagai
S=
P1
P2...
Pk...
Pm
.
Untuk suatu sistem persamaan linearS, masing-masing tigaoperasi elementermenghasilkansuatu sistem persamaan linearS′ yang ekivalen.
1. Pertukaran persamaan ke-i dan ke-j sedangkan persamaan yang lainnya tetap, yaitu
S=
P1...Pi...
Pj...
Pm
⇒ S′ =
P1...
Pj...Pi...
Pm
. (2.16)
2. Kedua ruas persamaan ke-i dikalikan dengan suatu konstata tidak-nolα ∈ R sedangkanpersamaan yang lainnya tetap, yaitu
S=
P1...Pi...
Pm
⇒ S′ =
P1...
αPi...
Pm
,dimanaα 6= 0 . (2.17)
Dalam hal iniαPi dinamakankelipatan dari Pi .

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 29
3. Menambah persamaan ke-j dengan kelipatan dari persamaan ke-i sedangkan persamaanyang lain tetap, yaitu
S=
P1...Pi...
Pj...
Pm
⇒ S′ =
P1...Pi...
Pj +αPi...
Pm
. (2.18)
Tiga operasi elementer, mentransformasi suatu sistem persamaan linear ke bentuks sistem per-samaan linear lainnya yang yang ekivalen. Tiga operasi yangdilakukan dalam (2.16), (2.17) dan(2.18) dinamakanOperasi Baris Elementer (OBE). Berikut ini diberikan suatu teorema tentangOBE.
Teorema 2.2.1Bila dalam Sistem Persamaan Linier (2.9) S dilakukan OBE sehingga didapatpersamaanS′ danS mempunyai penyelesaian, maka peyelesaian dalamS′ adalah sama denganpenyelesaian dalamS.
Bukti Bila dalam Persamaan (2.9) mempunyai penyelesaian, maka ada
(r1, r2, . . . , rn) ∈ Rn
yang memenuhi
a1,1r1+a1,2r2+ · · ·+a1,nrn = b1
a2,1r1+a2,2r2+ · · ·+a2,nrn = b2...
ai,1r1+ai,2r2+ · · ·+ai,nrn = bi...
a j ,1r1+a j ,2r2+ · · ·+a j ,nrn = b j...
am,1r1+am,2r2+ . . .+am,nxn = bm
(2.19)
Bila dalam Sistem Persamaan Linier (2.9) dilakukan OBE (2.16), maka didapat sistem persamaan
30
S′ yang diberikan oleh
a1,1x1+a1,2x2+ · · ·+a1,nxn = b1
a2,1x1+a2,2x2+ · · ·+a2,nxn = b2...
a j ,1x1+a j ,2x2+ · · ·+a j ,nxn = b j...
ai,1x1+ai,2x2+ · · ·+ai,nxn = bi...
am,1x1+am,2x2+ . . .+am,nxn = bm
(2.20)
Tetapi berdasarkan hipotesis ada(r1, r2, . . . , rn) ∈ Rn yang memenuhi Persamaan2.10, sehinggadidapat
a1,1r1+a1,2r2+ · · ·+a1,nrn = b1
a2,1r1+a2,2r2+ · · ·+a2,nrn = b2...
a j ,1r1+a j ,2r2+ · · ·+a j ,nrn = b j...
ai,1r1+ai,2r2+ · · ·+ai,nrn = bi...
am,1r1+am,2r2+ . . .+am,nrn = bm
(2.21)
Hal ini menunjukkan bahwa(r1, r2, . . . , rn)∈Rn adalah penyelesaian dari Sistem Persamaan2.20.
Berikutnya, bila dalam Sistem Persamaan Linier (2.9) dilakukan OBE (2.17), maka didapatsistem persamaanS′ yang diberikan oleh
a1,1x1+a1,2x2+ · · ·+a1,nxn = b1
a2,1x1+a2,2x2+ · · ·+a2,nxn = b2...
αai,1x1+αai,2x2+ · · ·+αai,nxn = αbi...
a j ,1x1+a j ,2x2+ · · ·+a j ,nxn = b j...
am,1x1+am,2x2+ . . .+am,nxn = bm
(2.22)
Tetapi berdasarkan hipotesis ada(r1, r2, . . . , rn) ∈ Rn yang memenuhi Persamaan2.10, yangdiberikan oleh Persamaan2.21. Dengan demikian bila persamaan yang ke-i dalam Persamaan2.21kedua ruas dikalikan denganα didapat
Pi : αai,1r1+αai,2r2+ · · ·+αa1,nrn = αbi
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 31
sehingga didapat
a1,1r1+a1,2r2+ · · ·+a1,nrn = b1
a2,1r1+a2,2r2+ · · ·+a2,nrn = b2...
αai,1r1+αai,2r2+ · · ·+αai,nrn = αbi...
a j ,1r1+a j ,2r2+ · · ·+a j ,nrn = b j...
am,1r1+am,2r2+ . . .+am,nrn = bm
(2.23)
Hal ini menunjukkan bahwa(r1, r2, . . . , rn)∈Rn adalah penyelesaian dari Sistem Persamaan2.22.
Terakhir, bila dalam Sistem Persamaan Linier (2.9) dilakukan OBE (2.18), maka didapatsistem persamaanS′ yang diberikan oleh
a1,1x1+a1,2x2+ · · ·+a1,nxn = b1
a2,1x1+a2,2x2+ · · ·+a2,nxn = b2...
ai,1x1+αai,2x2+ · · ·+αai,nxn = bi...
(a j ,1+αai,1)x1+(a j ,2+αai,2)x2+ · · ·+(a j ,n+αai,n)xn = b j +αbi...
am,1x1+am,2x2+ . . .+am,nxn = bm
(2.24)
Tetapi berdasarkan hipotesis ada(r1, r2, . . . , rn) ∈ Rn yang memenuhi Persamaan2.10, yangdiberikan oleh Persamaan2.21. Dengan demikian bila persamaan yang ke-j dalam Persamaan2.21ditambahα kali persamaan yang ke-i ruas didapat
Pj : (a j ,1+αai,1)r1+(a j ,2+αai,2)r2+ · · ·+(a j ,n+αa1,n)rn = bi +αbi
sehingga didapat
a1,1r1+a1,2r2+ · · ·+a1,nrn = b1
a2,1r1+a2,2r2+ · · ·+a2,nrn = b2...
ai,1r1+ai,2r2+ · · ·+ai,nrn = bi...
(a j ,1+αai,1)r1+(a j ,2+αai,2)r2+ · · ·+(a j ,n+αa1,n)rn = bi +αbi...
am,1r1+am,2r2+ . . .+am,nrn = bm
(2.25)
Hal ini menunjukkan bahwa(r1, r2, . . . , rn)∈Rn adalah penyelesaian dari Sistem Persamaan2.24.

32
Jadi berdasarkan Teorema2.2.1, tiga operasi baris elementer tidak akan mengubah himpunanpenyelesaian dari sistem persamaan linear aslinya. Berikut ini diberikan suatu contoh sederhanasistem persamaan linear
2x+y+z= 16x+2y+z=−1−2x+2y+z= 7
(2.26)
Pada setiap langkah, cara untuk menyelesaikan persamaan (2.26) difokuskan pada suatu posisikoefisien tak-nol yang dinamakanpivot dan untuk mengeliminasi semua suku dibawah pivotmenggunakan tiga operasi baris elementer. Bila elemen pivot sama dengan nol, maka persamaanpivot ditukar dengan persamaan dibawahnya untuk mendapat elemen pivot yang tidak nol. Bilakoefisien darix pada persamaan tak-nol, maka elemen ini diambil sebagai pivot. Pada contoh ini,elemen2© dalam sistem berikut adalah pivot untuk langkah yang pertama
2©x+y+z= 16x+2y+z= −1−2x+2y+z= 7
Langkah 1: Eliminasi semua suku dibawah pivot.
• Persamaan kedua kurangi 3 kali persamaan pertama
2©x+y+z = 1−y−2z = −4 (P2−3P1)
−2x+2y+z = 7
• Persamaan ketiga ditambah persamaan pertama
2©x+y+z = 1−y−2z = −43y+2z = 8 (P3+P1)
Langkah 2: Pilih suatu pivot baru.
• Untuk memilih pivot baru, pindah kebawah dari posisi pivot yang sudah ada dankekanannya. Bila koefisien ini tak-nol, maka kpefisien ini adalah pivot. Bila nol,maka tukar dengan persamaan dibawahnya. Dalam hal ini-1© adalah pivot yang baru.
2x+y+z = 1-1©y−2z = −43y+2z = 8
Langkah 3: Eliminasi semua suku dibawah pivot yang kedua.
• Persamaan ketiga tambah 3 kali persamaan kedua
2x+y+z = 1-1©y−2z = −4
−4z = −4 (P3+3P2)
(2.27)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 33
• Umumnya, pada setiap langkah pindahkan kebawah pivot terdahulu dan gerakankekanan untuk memperoleh pivot yang berikutnya, kemudian eliminasi semua sukudibawah pivot ini sampai tidak ada lagi yang bisa diproses untuk pengeliminasian.Jadi pivot yang ketiga adalah−4 dan tidak ada lagi elemen dibawah pivot ini untukdieliminasi. Jadi proses dihentikan.
Pada akhir dari Langkah 3, dikatakan sistem persamaan menjadi bentuk segitiga atas. Su-atu sistem persamaan berbentuk segi tiga atas mudah diselesaikan dengan menggunakan caramensubstitusi mumdur, yaitu persamaan terakhir diselesaikan, kemudian hasilnya substitusikankepersamaan yang diatasnya, dst. sampai semua peubah didapatkan. Untuk contoh ini, sele-saikan persamaan terakhir dari persamaan (2.27), didapat
z= 1.
Substitusikanz= 1 kepersamaan kedua dari persamaan (2.27), didapat
y= 4−2z= 4−2(1) = 2.
Akhirnya, substitusikanz= 1,y= 2 kepersamaan yang pertama dari persamaan (2.27), didapat
x=12(1−y−z) =
12(1−2−1) = −1.
Hasil yang didapat menunjukkan bahwa sistem persamaan (2.26) dan sistem persamaan (2.27)berdasarkan Teorema2.2.1 adalah ekivalen, jadi penyelesaian dari sistem persamaan (2.26)adalahx=−1,y= 2 danz= 1.
Jelas bahwa tidak ada suatu alasan untuk menuliskan simbol "x", "y" dan "z" serta "=" padasetiap langkah yang mana hanya memperlakukan koefisien dalam penghitungan. Bila simbol-simbol tsb. dihilangkan, maka suatu sistem persamaan linear ditampilkan kesuatu susunan dalambentuk persegi panjang berisi bilangan-bilangan yang manasetiap baris horizontal menyatakansatu persamaan. Misalnya, sistem persamaan linear (2.26) bila dituliskan dalam bentuk susunanpersegi panjang adalah:
2 1 16 2 1−2 2 1
∣∣∣∣∣∣
1−1
7
. (Tanda garis tegak menyatakan= .)
Susunan koefien disebalah kiri garis tegak dinamakanmatriks koefisiendaris sistem per-samaan. Keseluruhan elemen dalam susunan dinamakanmatriks diperbesar (augmented ma-trix) dari sistem persamaan linear. Bila koefisien matriks dinyatakan olehAAA dan elemen disebe-lah kanan garis tegak olehbbb, maka matriks diperbesar dari sistem persamaan linear dinotasikanoleh[AAA|bbb].
Secara formal, suatu skalar dari bilangan real atau kompleks danmatriks adalah suatususunan berbentuk persegi panjang dari skalar. MatriksAAA biasanya ditulis sebagai
AAA=
a1,1 a1,2 · · · a1,n
a2,1 a2,2 · · · a2,n...
.... . .
...am,1 am,2 · · · am,n
.

34
Elemen-elemen dari matriksAAAdinyatakan olehai, j dengani ∈mdan j ∈ n, dimanam= {1,2, · · · ,m}dann = {1,2, · · · ,n}. Elemenai, j menyatakan elemen dari matriksAAA yang terletak pada bariske-i kolom ke-j. Suatu contoh
AAA=
2 1 3 48 6 5 −9−3 8 3 7
, makaa1,1 = 2,a1,2 = 1, · · · ,a3,4 = 7. (2.28)
Suatusubmatriksdari matriksAAA adalah suatu susunan yang diperoleh dari menghapus se-barang kombinasi dari baris dan kolom matriksAAA. Suatu contoh matriks
BBB=
[2 4−3 7
]
adalah suatu submatriks dari matriksAAA pada (2.28) dengan menghapus baris kedua dan kolomkedua, dan ketiga dari matriksAAA.
Matriks AAA dikatakan berukuranm× n bila AAA mempunyai baris sebanyakm dan kolom se-banyakn. Dengan demikian, matriks berukuran 1× 1 adalah skalar, sebaliknya suatu skalaradalah matriks yang berukuran 1×1. Untuk penekanan bahwa matriksAAA berukuranm×n jugaditulis sebagaiAAAm×n. Bila m= n, maka matriksAAA dikatakan matrikspersegi. Suatu matriksyang hanya terdiri dari satu baris dinamakanvektor barisdan bila hanya terdiri dari satu kolomdinamkanvektor kolom.
SimbolAAAi,∗ digunakan untuk menyatakan baris ke-i danAAA∗, j menyatakan kolom ke-j darimatriksAAA. Contoh bilaAAA matriks pada (2.28), maka
AAA3,∗ =[−3 8 3 7
]danAAA∗,3 =
353
.
Untuk persamaan sistem linear (2.9) eliminasi Gauss bisa dilakukan melalui matriks diperbe-sar (augmented matrix)[AAA|bbb] dengan menggunakan operasi baris elementer pada[AAA|bbb]. Operasielementer ini meliputi tiga operasi baris elementer yang diberikan pada (2.16), (2.17) dan (2.18).Untuk matriks berukuranm×n
MMM =
MMM1,∗...
MMMi,∗...
MMM j ,∗...
MMMm,∗
,
tiga macam operasi baris elementer padaMMM adalah sebagai berikut.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 35
• Macam I: Pertukaran baris ke-i dan baris ke-j menghasilkan
MMM =
MMM1,∗...
MMM j ,∗...
MMMi,∗...
MMMm,∗
. (2.29)
• Macam II: Kalikan baris ke-i dengan skalar taknol menghasilkan
MMM =
MMM1,∗...
αMMMi,∗...
MMM j ,∗...
MMMm,∗
, α 6= 0. (2.30)
• Macam III: Tambah baris ke-j dengan kelipatan baris ke-i menghasilkan
MMM =
MMM1,∗...
MMMi,∗...
MMM j ,∗+αMMMi,∗...
MMMm,∗
. (2.31)
Untuk menyelesaikan sistem persamaan linear (2.9) menggunakan operasi baris elementer,mulai dengan matriks diperbesar[AAA|bbb] dan jadikan bentuk segitiga atas matriks koefisienAAA de-ngan melakukan operasi baris elementer pada[AAA|bbb]. Kembali pada contoh yang diberikan olehsistem persamaan linear (2.26), dengan melakukan operasi baris elementer pada matriks diperbe-sar[AAA|bbb] didapat
2© 1 16 2 1−2 2 7
∣∣∣∣∣∣
1−17
B2−3B1
B3+B1
⇒
2 1 10 -1© −20 3 2
∣∣∣∣∣∣
1−48
B3+3B2
⇒
2 1 10 −1 −20 0 −4
∣∣∣∣∣∣
1−4−4
.

36
Matriks diperbesar yang terakhir menyatakan bentuk segitiga atas dari sistem persamaan linear
2x+y+z = 1−y−2z = −4
−4z = −4
Dengan substitusi mundur, didapat hasil seperti sebelumnyaz= 1,y= 2 danx=−1. Umumnya,bila suatu sistem persamaan linearn×n mempunyai bentuk segitiga atas
t1,1 t1,2 · · · t1,n0 t2,2 · · · t2,n
· · · .... . .
...0 0 · · · tn,n
∣∣∣∣∣∣∣∣∣
c1
c2...
cn
(2.32)
dimana masing-masingti,i 6= 0, maka algoritma umum untuk substitusi mundur diberikan sebagaiberikut.
Algoritma Substitusi Mundur
Tentukanxi pada (2.32), yang pertama menentukanxn =cntn,n
kemudian
secara berulang untuki = n−1,n−2, · · · ,2,1, hitungxi =
1ti,i(ci − ti,i+1xi+1− ti,i+2xi+2− · · ·− ti,nxn).
Suatu cara untuk menaksir effisiensi suatu algorithma adalah menghitung banyaknyanya ope-rasi aritmatika yang digunakan. Untuk berbagai alasan, tidak dibedakan tambah dan kurang,dan kali dan bagi. Lagi pula kali/bagi dihitung secara terpisah dari tambah/kurang. Bahkanbila secara rinci menggunakan suatu algoritma, penting bahwa mengetahui banyaknya operasiuntuk eliminasi Gauss dengan substitusi mundur sehingga akan didapat suatu dasar perbandinganketika menggunakan algoritma yang lain. Berikut ini diberikan banyaknya operasi aritmatikayang digunakan dalam eliminasi Gauss.
Banyaknya Operasi Eliminasi Gauss
Eliminasi Gauss dengan substitsusi mundur untuk sistem persamaan linearn×n membutuhkann3
3+n2−
n3
, kali/bagi
dann3
3+
n2
2−
5n6
, tambah/kurang.
Bila n meningkat, sukun3/3 mendominasi suku yang lainnya. Oleh karena itu, hal yang pentingEliminasi Gauss dengan substitusi mundur untuk sistem persamaan linearn×n membutuhkansekitarn3/3 operasi kali/bagi dan membutukan juga sekitarn3/3 operasi tambah/kurang.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 37
Contoh 2.2.1 Selesaikan sistem persamaan berikut menggunakan eliminasi Gauss dengan sub-stitusi mundur:
x2−x3 = 3−2x1+4x2−x3 = 1
−2x1+5x2−4x3 = −2
Penyelesaian :Matriks diperbesar dari sistem persamaan linear adalah
0© 1 −1−2 4 −1−2 5 −4
∣∣∣∣∣∣
31
−2
.
Karena pivot pertama adalah0©, maka tukar baris pertama dengan baris kedua dan sebaliknya,selanjutnya lakukan eliminasi elemen elemen dibawah pivotyang dipilih sehingga didapat
-2© 4 −10 1 −1−2 5 −4
∣∣∣∣∣∣
13
−2
B3−B1−→
−2 4 −10 1© −10 1 −3
∣∣∣∣∣∣
13
−3
B3−B2−→
−2 4 −10 1 −10 0 −2
∣∣∣∣∣∣
13
−6
.
Selanjutnya, lakukan substitusi mundur, didapat
x3 =−6−2 = 3,
x2 = 3+x3 = 3+3= 6,x1 = −1
2(1−4x2+x3) = −12(1−24+3) = 10.
Contoh 2.2.2 Misalkan bahwa 100 serangga terdistribusi dalam suatu ruang tertutup terdiri dariempat ruang dengan jalur-lintas diantaranya sebagaimana dalam Gambar2.8. Pada akhir satu
#1
#2
#3
#4
Gambar 2.8: Distribusi serangga dalam suatu ruangan
menit, serangga terdistribusi kembali dengan sendirinya.Asumsikan bahwa satu menit tidakcukup waktu untuk suatu serangga pindah ke lebih dari satu ruang dan pada akhir satu menit 40%serangga disetiap ruang tidak meninggalkan ruangan, mereka tetap pada awal menit. Seranggayang meninggalkan ruangan secara seragam menyebar diantara ruangan, serangga ini secaralangsung dapat mencapai keadaan semula mereka tinggal., misalnya # 3 separuh bergerak ke # 2
38
dan separuh ke # 4. Bila diakhir satu menit terdapat 12, 25, 26dan 37 serangga masing-masingdi ruang # 1, # 2, # 3 dan # 4, maka tentukan apa seharusnya distribusi awal.Jawab Bila xi adalah banyaknya keadaan awal dalam ruangan #i dengani = 1,2,3,4, didapatsistem persamaan linear
0.4x1+0x2+0x3+0.2x4 = 120x1+0.4x2+0.3x3+0.2x4 = 250x1+0.3x2+0.4x3+0.2x4 = 26
0.6x1+0.3x2+0.3x3+0.4x4 = 37
dengan menggunakan eliminasi Gauss dan substitusi mundur didapatx1 = 10,x2 = 20,x3 = 30danx4 = 40.
2.3 Menyelesaikan Sistem Persamaan Linier dengan Sage Note-Book
Dalam kesempatan ini digunakan Sage NoteBook untuk menyelesaikan sistem Persamaan Linearmelalui Operasi baris Elementer ataupun dengan Eleminasi Gauss-Jordan.
Misalnya diberikan sistem persamaan[
1 22 1
] [xy
]
=
[12
]
.
Untuk menyelesaikan Sistem Persamaan Linier tersebut dalam Sel Sage NoteBook ketik pe-rintah berikut.
A=matrix([[1,2],[2,1]])b=matrix([[1],[2]])Ab = A.augment(b,subdivide=True)html("Matrik diperbesar $[A|b]=%s$"%latex(Ab))
Ouput dari perintah tersebut adalah
Matrik diperbesar[A|b] =(
1 2 12 1 2
)
Selanjutnya meyelesaikan sistem persamaan linier dengan OBE gunakan perintah berikut:
Ac=copy(Ab)Ac.add_multiple_of_row(1 ,0,-2 )html("Hasil OBE $%s$"%latex(Ac))
outputnya adalah
Hasil OBE :
(1 2 10 −3 0
)
Dari hasil ini menjelaskan bahway= 0 danx= 1.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 39
Latihan
Latihan 2.3.1 Gunakan Eliminasi Gauss dengan substitusi mundur pada sistem persamaan lin-ear berikut
(a)
2x1−x2 = 0−x1+x2 −x3 = 0
−x2 +x3 = 1
(b)
4x2−3x3 = 3−x1+7x2−5x3 = 4−x1+8x2−6x3 = 5
Latihan 2.3.2 Selesaikan sistem persamaan linear berikut
x1+x2+x3+x4 = 4x1+x2+3x3+3x4 = 3x1+x2+2x2+3x4 = 3
x1+3x2+3x3+3x3 = 4
Latihan 2.3.3 Diberikan sistem persamaan linear
x+2y+z= 3ay+5z= 10
2x+7y+az= b
(a) Dapatkan nilai a dan b supaya sistem persamaan linear mempunyai penyelesaian tunggal.
(b) Dapatkan nilai a dan b supaya sistem persamaan punya penyelesaian tidak tunggal.
Latihan 2.3.4 Suatu jaringan dari aliran terdiri dari 4 titik A, B, C dan D yang dihubungkanoleh garis. Dengan asumsi bahwa
• Total aliran yang masuk ke suatu titik sama dengan total aliran yang keluar dari suatutitik.
• Total aliran yang masuk kedalam jaringan sama dengan total aliran yang keluar darijaringan.
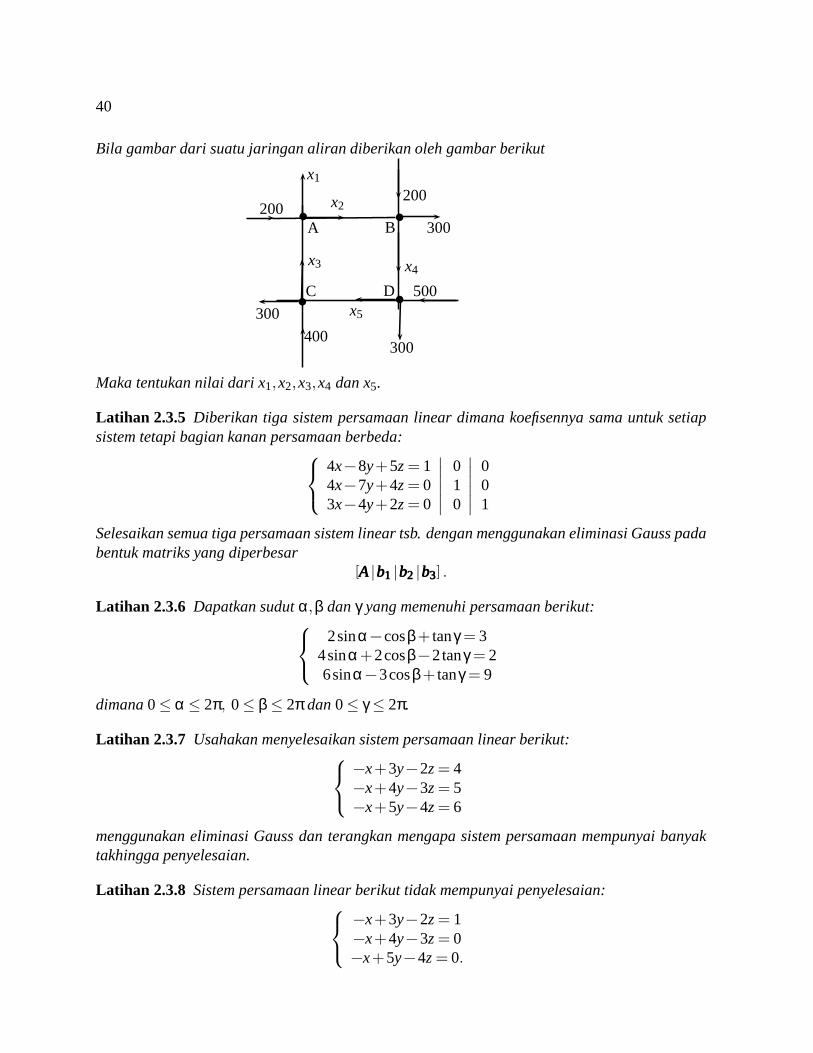
40
Bila gambar dari suatu jaringan aliran diberikan oleh gambar berikut
b b
b b
x1
x2
x3 x4
x5
A B
C D
200
300
400
500
200
300
300
Maka tentukan nilai dari x1,x2,x3,x4 dan x5.
Latihan 2.3.5 Diberikan tiga sistem persamaan linear dimana koefisennya sama untuk setiapsistem tetapi bagian kanan persamaan berbeda:
4x−8y+5z= 14x−7y+4z= 03x−4y+2z= 0
∣∣∣∣∣∣
010
∣∣∣∣∣∣
001
Selesaikan semua tiga persamaan sistem linear tsb. dengan menggunakan eliminasi Gauss padabentuk matriks yang diperbesar
[AAA|b1b1b1 |b2b2b2 |b3b3b3] .
Latihan 2.3.6 Dapatkan sudutα,β danγ yang memenuhi persamaan berikut:
2sinα−cosβ+ tanγ = 34sinα+2cosβ−2tanγ = 26sinα−3cosβ+ tanγ = 9
dimana0≤ α≤ 2π, 0≤ β≤ 2π dan0≤ γ≤ 2π.
Latihan 2.3.7 Usahakan menyelesaikan sistem persamaan linear berikut:
−x+3y−2z= 4−x+4y−3z= 5−x+5y−4z= 6
menggunakan eliminasi Gauss dan terangkan mengapa sistem persamaan mempunyai banyaktakhingga penyelesaian.
Latihan 2.3.8 Sistem persamaan linear berikut tidak mempunyai penyelesaian:
−x+3y−2z= 1−x+4y−3z= 0−x+5y−4z= 0.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 41
Usahakan menyelesaikan sistem persamaan linear ini menggunakan eliminasi Gauss dan je-laskan mengapa sistem persamaan linear tsb. tidak mungkin untuk diselesaikan.
Latihan 2.3.9 Gunakan sistem persamaan linear3×3 untuk memperoleh koefisien suatu per-samaan parabola y= α+βx+ γx2 yang melalui tiga titik(1,1), (2,2) dan(3,0).
Latihan 2.3.10 Diketahui seperti Contoh2.2.2dan bila distribusi awal adalah 20, 20, 20 dan40, maka tentukan distribusi akhir pada satu menit.
Latihan 2.3.11 Terangkan mengapa suatu sistem persamaan linear tidak akanpernah mem-punyai tepat dua penyelesaian yang berbeda. Perluas pernyataan ini, untuk menerangkan faktabahwa bila suatu sistem persamaan linear mempunyai lebih dari satu penyelesaian, maka penye-lesaian itu haruslah banyak takhingga penyelesaian.
Latihan 2.3.12 Misalkan bahwa[AAA|bbb] adalah matriks diperbesar dari suatu sistem persamaanlinear. Telah diketahui bahwa operasi baris elementer tidak mengubah penyelesaian sistem per-samaan linear. Bagaimanapun, tidak disebutkan bahwa bilaoperasi kolomdapat mempengaruhisuatu penyelesaian suatu sistem persamaan linear.
(a) Uraikan akibat pada penyelesaian suatu sistem persamaan linear bila kolom A∗, jA∗, jA∗, j dan A∗,kA∗,kA∗,ksaling dipertukarkan.
(b) Uraikan akibat pada penyelesaian suatu sistem persamaan linear bila kolom A∗, jA∗, jA∗, j digantiolehαA∗, jA∗, jA∗, j denganα 6= 0.
(c) Uraikan akibat pada penyelesaian suatu sistem persamaan linear bila kolom A∗, jA∗, jA∗, j digantioleh A∗, jA∗, jA∗, j +αA∗,kA∗,kA∗,k.Petunjuk : Lakukan suatu percobaan dengan matriks berukuran2×2 dan3×3.
Pada akhir bagian ini dibahas metode menyelesaiakna sistempersamaan linear menggunakanapa yang dinamakanGauss-Jordan. Metode ini mengenalkan suatu variasi eleminasi Gauss yangdikenal dengan namaMetode Gauss-Jordan. Walaupun ada beberapa yang membingungkanketika Jordan menerima penghargaan untuk algoritma ini, sekarang jelas bahwa faktanya metodeini dikenalkan oleh seorang geodesi yang bernama Wilhelm Jordan (1842-1899) dan bukan olehyang telah banyak dikenal oleh matematikawan yaitu Marie Ennemond Camille Jordan (1838-1922). Dua keutamaan dari metode Gauss-Jordan yang membedakan dengan Eleminasi Gausssebagai berikut.
• Pada setiap langkah, elemen pivot dijadikan 1.
• Pada setiap langkah, semua suku-suku diatas pivot dan juga dibawahnya dieliminasi.
42
Dengan kata lain, bila
a1,1 a1,2 · · · a1,n
a2,1 a2,2 · · · a2,n...
.... . .
...an,1 an,2 · · · an,n
∣∣∣∣∣∣∣∣∣
b1
b2...
bn
matriks diperbesar yang berkaitan dengan sistem persamaanlinear, maka operasi baris elementerdigunakan untuk mereduksi matriks ini menjadi matriks berbentuk
1 0 · · · 00 1 · · · 0...
......
...0 0 · · · 1
∣∣∣∣∣∣∣∣∣
c1
c2...
cn
.
Tampak bahwa penyelesaian diberikan oleh kolom terakhir, yaituxi = ci , i = 1,2, · · · ,n dan tanpamelakukan substitusi mundur.
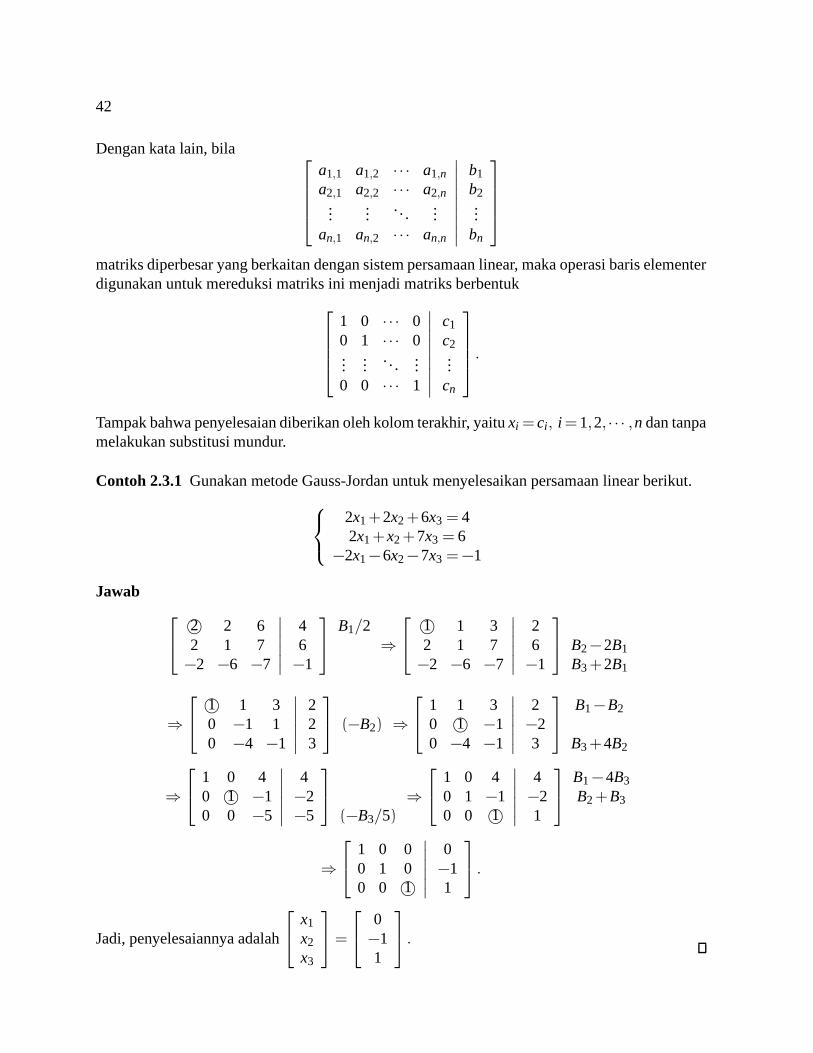
Contoh 2.3.1 Gunakan metode Gauss-Jordan untuk menyelesaikan persamaan linear berikut.
2x1+2x2+6x3 = 42x1+x2+7x3 = 6
−2x1−6x2−7x3 =−1
Jawab
2© 2 62 1 7−2 −6 −7
∣∣∣∣∣∣
46−1
B1/2⇒
1© 1 32 1 7−2 −6 −7
∣∣∣∣∣∣
26−1
B2−2B1
B3+2B1
⇒
1© 1 30 −1 10 −4 −1
∣∣∣∣∣∣
223
(−B2) ⇒
1 1 30 1© −10 −4 −1
∣∣∣∣∣∣
2−23
B1−B2
B3+4B2
⇒
1 0 40 1© −10 0 −5
∣∣∣∣∣∣
4−2−5
(−B3/5)⇒
1 0 40 1 −10 0 1©
∣∣∣∣∣∣
4−21
B1−4B3
B2+B3
⇒
1 0 00 1 00 0 1©
∣∣∣∣∣∣
0−11
.
Jadi, penyelesaiannya adalah
x1
x2
x3
=
0−11
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 43
Dari apa yang telah dibahas kelihatannya bahwa ada tidak begitu banyak perbedaan di-antara metode Gauss-Jordan dan eliminasi Gauss dengan substitusi mundur disebabkan pen-geliminasian suku-suku diatas pivot dengan metode Gauss-Jordan kelihatnnya ekivalen denganmelakukan substitusi mundur. Tetapi hal ini tidak benar. Metode Gauss-Jordan membutuhkanlebih banyak penghitungan dari pada eliminasi Gauss dengansubstitusi mundur. Hal ini bisa dil-ihat dari banyaknya operasi yang digunakan dalam metode Gauss-Jordan sebagaimana berikut.
Banyaknya Operasi Metode Gauss-Jordan
Metode Gauss-Jordan untuk sistem persamaan linearn×n membutuhkann3
2+
n2
2, kali/bagi
dann3
2−
n2
, tambah/kurang.
Dengan kata lain, metode Gauss-Jodan membutuhkan sekitarn3/2 operasi bagi/kalidan juga membutuhkan sekitarn3/2 operasi tambah/kurang.
Ingat dalam pembahasan sebelumnya eliminasi Gauss dengan substitusi mundur hanya mem-butuhkan sekitarn3/3 operasi kali/bagi begitu juga hal nya sama untuk operasi tambah/kurang.Bandingkan dengann3/2 operasi kali/bagi begitu juga untuk operasi tambah/kurang yang dibu-tuhkan ketika melakukan metode Gauss-Jordan, bisa dilihatbahwa metode Gauss-Jordan mem-butuhkan sekitar lebih 50% upaya dari pada eliminasi Gauss dengan substitusi mundur. Untuksuatu sistem persamaan linear yang kecil misalnyan = 3, perbedaan ini tidak begitu cukup be-sar berarti. Tetapi dalam praktis sistem persamaan linear sering muncul dengann cukup besar.Dalam hal ini, eliminasi Gauss dengan substitusi mundur lebif effisien dibandingkan denganmetode Gauss-Jordan. Misalnya untukn = 100, makan3/3 sekitar 333333 sedangkann3/2adalah 500000 dalam hal ini selisihnya adalah 166667 operasi kali/bagi begitu juga sama untukoperasi tambah/kurang.
Walaupun metode Gauss-Jordan dalam praktis banyak dihindari untuk menyelesaiakan sis-tem persamaan linear, metode ini mempunyai kegunaan dalam teori. Kegunaannya adalah masalahteknik dari pada masalah komputasinya. Selain itu metode Gauss-Jordan dapat digunakan untukmenentukan invers dari suatu matriks.
Untuk mengakhiri bagian ini, diberikan cara menyelesaiakan sistem persamaan linear menggu-nakan Maxima untuk Metode Gauss-Jordan. Pada Contoh2.2.2diselesaikan dengan cara metodeGauss-Jordan, dalam Maxima ketik sbb:
A=matrix([[4/10,0,0,2/10],[0,4/10,3/10,2/10],[0,3/10,4/10,2/10],[6/10,3/10,3/10,4/10]])b=matrix([[12],[25],[26],[37]])

44
Ab = A.augment(b,subdivide=True)html("Matrik diperbesar $[A|b]=%s$"%latex(Ab))printhtml("OBE Gauss-Jordan : $%s$"%latex(Ab.rref()))
Output dari perintah tersebut adalah :
Matriks diperbesar :[A|b] = [A|b] =
25 0 0 1
5 120 2
5310
15 25
0 310
25
15 26
35
310
310
25 37
OBE Gauss-Jordan :
1 0 0 0 100 1 0 0 200 0 1 0 300 0 0 1 40
Sehingga dengan menggunakan OBE metode Gauss-Jordan, didapatx1= 10,x2= 20,x3= 30danx4 = 40. Terlihat hasilnya sama seperti pada hasil penghitungansebelumnya.
Hasil penghitungan numerik untuk suatu sistem persamaan linear terhadap perubahan nilaiyang kecil bisa mempengaruhi konsistensi hasil hitungan, bila sistem persamaan linear terhadapsuatu perubahan nilai yang sangat kecil merubah hasil yang sangat besar (sangat sensitif) hal inimembuat kecenderungan hitungan numerik sangat jauh hasilnya dari yang semestinya, bahkanakan sangat jauh bedanya dengan jawab (solusi) eksaknya. Maxima Toolbox dapat mengatasikesensitifan ini. Sebagai contoh diberikan sistem persamaan berikut
.835x+ .667y= .168,
.333x+ .266y= .067.
}
(2.33)
Penyelesaian eksaknya adalahx= 1 dany= −1. Bila diadakan perubahan kecil dari nilai 0.067menjadi 0.066 sehingga didapat suatu sistem persamaan yang hampir sama yaitu
.835x+ .667y= .168,
.333x+ .266y= .066.
}
(2.34)
Penyelesaian eksak dari Persamaan (2.34) adalahx = −666 dany = 834. Terlihat bahwa hasileksak dari Persamaan (2.33) dan (2.34) sangat jauh berbeda, sedangkan Persamaan (2.33) dan(2.34) hampir sangat sama, hanya ada beda sangat kecil pada satu nilai 0.067 menjadi 0.066. Se-lanjutnya kedua persamaan tsb. diselesaikan dengan menggunakan Sage NoteBook sbb:
(%i5)
kill(all)$ ab:matrix([0.835,0.667,0.168],[0.333,0.266,0.067])$ab:echelon(ab)$ ab:rowop(ab,1,2,667/835);
(%o4)
[1 0 10 1 −1
]
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 45
(%i5) kill(all)$ ab:matrix([0.835,0.667,0.168],[0.333,0.266,0.066])$ab:echelon(ab)$ ab:rowop(ab,1,2,667/835);
(%o4)
[1 0 −6660 1 834
]
Terlihat bahwa hasil numerik yang dilakukan dalam Maxima Toolbox untuk kedua Persamaan(2.33) dan (2.34) secara siknifikan sama dengan jawab eksak. Hal ini menjelaskan bahwa MetodeGauss-Jordan untuk suatu sistem persamaan yang sensitif terhadap perubahan kecil, MaximaToolbox mampu menyelesaikan masalah ini dengan baik.
Latihan
Latihan 2.3.13 Gunakan metode Gauss-Jordan untuk menyelesaikan sistem persamaan berikut:
(a)
4x2−3x3 = 3−x1+7x2−5x3 = 4−x1+8x2−6x3 = 5
(b)
x1+x2+x3+x4 = 1x1+2x2+2x3+2x4 = 0x1+2x2+3x3+3x4 = 0
x1+2x2+3x3+4x4 = 0.
(c)
5x2+15x4 = 5x1+4x2+7x3+x5 = 3
x1+2x2+3x3 = 1x1+2x2+4x3+x4 = 2.
(d)
2x1+x2+3x3+2x4 = 5x1+3x2+2x3+4x4 = 1
3x1+2x2 = 2.
Latihan 2.3.14 Gunakan metode Gauss-Jordan untuk menyelesaikan secara bersama sistempersamaan linear berikut:
2x1−x2 = 1−x1+2x2−x3 = 0
−x2+x3 = 0
∣∣∣∣∣∣
010
∣∣∣∣∣∣
001.
46
Latihan 2.3.15 Selesaikan sistem persamaan linear berikut
−x1+x2−x3+3x4 = 03x1+x2−x3−x4 = 02x1−x2−2x3−x4 = 0
Latihan 2.3.16 Selesaikan sistem persamaan linear berikut
x1+x2+x3+x4+x5 = 2x1+x2+x3+2x4+2x5 = 3x1+x2+x3+2x4+3x5 = 2
Mengapa mempunyai banyak penyelesaian?
Latihan 2.3.17 Selidiki apakah sistem persamaan linear berikut mempunyaijawab atau tidak!{
x1+2x2+x3 = 12x1+4x2+2x3 = 3
2.4 Matriks
Disini dikenalkan beberapa ide dasar yang mencakup pengkajian matriks. Dalam bagian se-belumnya digunakan matriks diperbesar untuk menyatakan sistem persamaan linear. Susunanbilangan ini sering kita jumpai juga dalam bentuk yang lain,misalnya susunan bilangan de-ngan tiga baris dan tujuh kolom yang menyatakan berapa jam waktu yang digunakan seorangmahasiswa setiap hari untuk mempersiapkan tiga mata kuliahyang ditempuhnya sebagaimanadiberikan oleh Tabel2.1berikut.
Tabel 2.1: Waktu Persiapan Mahasiswa
Ming. Sen. Sel. Rab. Kam. Jum. Sab.Aljabar 1 3 2 1 4 4 2
Aljabar Linear 2 0 1 3 5 0 2Geometry 4 3 1 1 0 2 0
Bila judul matakuliah dan hari dalam Tabel2.1 dihapus, maka didapat susunan bilangan realdalam bentuk pesegi panjang dengan tiga baris dan tujuh kolom:
1 3 2 1 4 4 22 0 1 3 5 0 24 3 1 1 0 2 0
, (2.35)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 47
ungkapan penulisan dalam (2.35) dinamakan suatumatriks.
Secara lebih umum, matriks adalah suatu susunan dari bilangan real atau kompleks yangberbentuk persegi panjang, setiap bilangan ini dinamakan elemen matriks yang disusun secarabaris dan kolom. Beberapa contoh matriks adalah:
−1 2 −3√
20 1 π 5−6 1
2 8 118 0 2 71 3 5 7
,
1 −1 10 2 43 5 8
,
53654
,
[3 6 4 9 0
]dan [−3] .
Untuk menampilkan matriks dalam Maxima lakukan sebagai berikut:
(%i12) matrix([-1,2,-3,sqrt(2)], [0,1,%pi,5],[-6,1/2,8,11], [8,0,2,7],[1,3,5,7]);matrix([1,-1,1],[0,2,4],[3,5,8]);matrix([5],[3],[6],[5],[4]);matrix([3,6,4,9,0]);
(%o12)
−1 2 −3√
20 1 π 5−6 1
2 8 118 0 2 71 3 5 7
(%o13)
1 −1 10 2 43 5 8
(%o14)
53654
(%o15)[3 6 4 9 0
]
Ukuran suatu matriks adalah banyaknya baris dan banyaknya kolom. Bila banyak barisadalahm dan banyaknya kolomn, maka ukuran matriks ditulis sebagaim× n. Jadi ukuranmatriks pada contoh diatas berturut-turut adalah 5×4, 3×3, 5×1, 1×5 dan 1×1. SuatumatriksA ukuranm×n biasanya dinotasikan denganA = [ai, j ], i = 1,2, . . . ,m, j = 1,2, . . . ,natau secara singkat[ai, j ]m×n (bila ukuran matriks penting untuk diketahui). Bila ukuranmatrikstidak penting untuk diketahui cukup ditulis[ai, j ]. Selanjutnyaai, j menyatakan elemen baris ke-ikolom ke-j dari suatu matriksA denganai, j ∈ R atauai, j ∈ C yang manaR menyatakan him-
48
punan bilangan real danC menyatakan himpunan bilangan kompleks. Untuk matriks berukuran1×1 yaitu[a] cukup ditulisa.
Suatu matriks yang hanya mempunyai satu kolom dinamakanmatriks kolom(vektor kolom)sedangkan bila hanya mempunyai satu baris dinamakanmatriks baris (vektor baris). SuatumatriksA dengann baris dann kolom dinamakanmatriks persegi ukurann
A=
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n...
..... .
...an,1 an,2 . . . an,n
,
elemen-elemena1,1,a2,2, . . . ,an,n dinamakan elemen-elemen didiagonal utamamatriksA. Berikutini diberikan pengertian dua matriks adalah sama. Diberikan matriksA= [ai, j ] danB= [bi, j ], ma-triks A danB dikatakan sama bila kedua ukuran matriksA danB sama danai, j = bi, j untuk semuai dan j. Contoh, matriks-matriks berikut
A=
[1 23 4
]
,B=
[x 23 4
]
danC=
[1 2 33 4 5
]
bila x = 1, makaA = B. Walaupun ukuranA danB sama, bilax 6= 1, makaA 6= B. SedangkanA 6=C danB 6=C sebab ukuran matriksA tidak sama dengan ukuran matriksC begitu juga ukuranB tidak sama dengan ukuranC.
2.5 Aritmatika dan Operasi Matriks
Dalam bagian ini dibahas penambahan , pengurangan dan perkalian matriks serta dibahas trans-pose dan trace dari suatu matriks.
2.5.1 Penambahan, Pengurangan Matriks dan Perkalian Matriks
Misalkan, sebuah kota dibagi menjadi dua wilayah Utara dan Selatan. Banyaknya siswa SMPdan SMA kelas I, II dan III diberikan oleh tabel berikut:
Tabel 2.2: Daftar Siswa Wilayah Utara dan Selatan
Wilayah Utara Wilayah SelatanKelas I Kelas II Kelas III Kelas I Kelas II Kelas III
SMP 2234 2105 2001 SMP 2105 1866 1509SMA 1973 1873 1762 SMA 1877 1689 1574
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 49
Maka daftar total siswa SMP dan SMA keseluruhan kota diberikan oleh tabel berikut
Tabel 2.3: Daftar total siswa SMP dan SMA seluruh wilayah
Kelas I Kelas II Kelas IIISMP 2234+2105=4339 2105+1866=3971 2001+1509= 3510SMA 1973+1877=3850 1873+1689= 3562 1762+1574= 3336
Bila daftar keadaan siswa wilayah Utara dan Selatan di tuliskan sebagai matrik, didapat matriks:
U =
[2234 2105 20011973 1873 1762
]
danS=
[2105 1866 15091877 1689 1574
]
dan matriksU +Sdidefinisikan sebagai
U +Sdef=
[2234+2105 2105+1866 2001+15091973+1877 1873+1689 1762+1574
]
=
[4399 3971 35103850 3562 3336
]
Terlihat bahwa Tabel2.3bentuk matriksnya diberikan oleh matriksU +S. Hasil pembahasan inimenjelaskan penambahan dua matriks. Hal yang serupa bisa dilakukan untuk pengurangan duamatriks.
Berikut ini diberikan definisi secara umum untuk penambahandan pengurangan dua matriks.Penambahan dan pengurangan dua matriksA danB bisa dilakukan bila kedua matriks mem-punyai ukuran yang sama dan elemen-elemen dariA+B danA−B masing-masing diberikanoleh
[A+B]i, j = ai, j +bi, j dan[A−B]i, j = ai, j −bi, j .
Bila ukuranA danB tidak sama, maka penambahan dan pengurangan dariA danB tidak di-definisikan. Berikut ini diberikan contoh penambahan dan pengurangan matriks. Diberikanmatriks-matriks:
A=
[1 −2 00 7 −3
]
, B=
[−2 3 113 −6 4
]
danC=
[1 −23 −4
]
.
Maka
A+B=
[−1 1 113 1 1
]
, A−B=
[3 −5 −11−3 13 −7
]
sedangkanA+C danB+C tidak terdefinisi, begitu jugaA−C danB−C tidak terdefinisi. Untukmelakukan operasi tambah dan kurang bagi matriks dalam Maxima lakukan sebagai berikut:
(%i5) a:A=matrix([1,-2,0],[0,7,-3]);b:B=matrix([-2,3,11],[3,-6,4]);c:C=matrix([1,-2],[3,-4]);"A+B"= rhs(a)+rhs(b);"A-B"= rhs(a)-rhs(b);

50
(%o1) A=
[1 −2 00 7 −3
]
(%o2) B=
[−2 3 113 −6 4
]
(%o3) C=
[1 −23 −4
]
(%o4) A+B=
[−1 1 113 1 1
]
(%o5) A−B=
[3 −5 −11−3 13 −7
]
Untuk A+C danB−C tidak terdifinisi, hal ini bisa dilihat hasil output dalam Maxima sebagaiberikut:
(%i9) "A+C"=rhs(a)+rhs(c);"B-C"=rhs(b)+rhs(c);
fullmap: arguments must have same formal structure.– an error. To debug this try: debugmode(true);fullmap: arguments must have same formal structure.– an error. To debug this try: debugmode(true);
Bila A sebarang matriks dengan elemen-elemen diR atau diC dank sebarang skalar diRatau diC, maka hasil kalikA adalah matriks yang semua elemen-elemennya diperoleh melaluimengalikank dengan semua elemen-elemen dariA. MatrikskAdinamakanperkalian skalardariA. Dengan notasi matriks, bilaA= [ai, j ], maka
[kA]i, j = kai, j .
Contoh 2.5.1
Diberikan matriks-matriks
A=
[0 −1 −32 4 6
]
, B=
[8 0 64 14 −2
]
danC=
[10 2 −51 4 3
]
maka
(−1)A=
[0 1 3−2 −4 −6
]
,12
B=
[4 0 32 7 −1
]
dan 3C=
[30 6 −153 12 9
]
.
Perkalian skalar dengan matriks dalam Maxima dilakukan sebagai berikut:
(%i6) a: A=matrix([0,-1,-3],[2,4,6]);b:B=matrix([8,0,6],[4,14,-2]);c: C=matrix([10,2,-5],[1,4,3]);"(-1)A"= -1*rhs(a);"1/2B"= 1/2*rhs(b);"3C"=3*rhs(c);
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 51
(%o1) A=
[0 −1 −32 4 6
]
(%o2) B=
[8 0 64 14 −2
]
(%o3) C=
[10 2 −51 4 3
]
(%o4) (−1)A=
[0 1 3−2 −4 −6
]
(%o5)12
B=
[4 0 32 7 −1
]
(%o6) 3C=
[30 6 −153 12 9
]
Untuk lebih praktis, penulisan(−1)A cukup ditulis−A. Bila A1,A2, . . . ,An matriks-matriksdengan ukuran yang sama dank1,k2, . . . ,kn adalah skalar, maka bentuk
k1A1+k2A2+ . . .+knAn
dinamakan suatukombinasi lineardari A1,A2, . . . ,An dengan koefisien-koefisienk1,k2, . . . ,kn.Misalnya pada Contoh2.5.1, maka
−A+12
B+3C =
[0 1 3−2 −4 −6
]
+
[4 0 32 7 −1
]
+
[30 6 −153 12 9
]
=
[34 7 −93 15 2
]
adalah kombinasi linear dariA,B danC dengan koefisien−1,12
dan 3. Selanjutnya diberikan
notasiRm×n menyatakan himpunan semua matriks ukuranm× n dengan elemen-elemen diRdanRn×1 adalah himpunan semua vektor kolom ukurann biasanya cukup ditulisRn.
Sebegitu jauh telah dibahas perkalian suatu skalar dengan matriks, tetapi perkalian dua ma-triks belum dibahas. Sebagaimana telah diketahui penambahan dan pengurangan matriks adalahmenambah atau mengurangi elemen-elemen yang bersesuaian.Perkalian matriks agak berbedadengan penambahan matriks. Untuk mendefinisikan perkaliandua matriksA dan B, sebagaimotifasi diberikan dua sistem persamaan linear
a1,1x1+a1,2x2+a1,3x3 = y1
a2,1x1+a2,2x2++a2,3x3 = y2(2.36)
danb1,1z1+b1,2z2 = x1
b2,1z1+b2,2z2 = x2
b3,1z1+b3,2z2 = x3
(2.37)
52
Bila diinginkany1 dany2 bergantung pada peubahz1 danz2, maka didapat sistem persamaan
(a1,1b1,1+a1,2b2,1+a1,3b3,1)z1+(a1,1b1,2+a1,2b2,2+a1,3b3,2)z2 = y1
(a2,1b2,1+a2,2b2,1+a2,3b3,1)z1+(a2,1b1,2+a2,2b2,2+a2,3b3,2)z2 = y2(2.38)
Selanjutnya bila
c1,1 = a1,1b1,1+a1,2b2,1+a1,3b3,1 c1,2 = a1,1b1,2+a1,2b2,2+a1,3b3,2
c2,1 = a2,1b2,1+a2,2b2,1+a2,3b3,1 c2,2 = a2,1b1,2+a2,2b2,2+a2,3b3,2
atau secara singkat
ci, j =3
∑k=1
ai,kbk, j , i = 1,2 dan j = 1,2,3 (2.39)
dan masing-masing matriksA,B,C diberikan oleh
A=
[a1,1 a1,2 a1,3
a2,1 a2,2 a2,3
]
,B=
b1,1 b1,2
b2,1 b2,2
b3,1 b3,2
,C=
[c1,1 c1,2
c2,1 c2,2
]
,
dan didefinisikan perkalian matriksABdef= C, dengan elemen-elemen matriksC diberikan oleh
Persamaan (2.39), maka Persamaan (2.38) dapat ditulis sebagai perkalian matriks
CZ=Y,denganZ =
[z1
z2
]
danY =
[y1
y2
]
.
Perhatikan bahwa Persamaan (2.39) mengisyaratkan banyaknya kolom dariA harus sama de-ngan banyaknya barisB dalam hal ini keduanya sama dengan 3 dan ukuran matriks hasilkaliadalah 2(banyaknya barisA)×2(banyaknya kolomB). Jadi syarat dua matriks bisa dikalikanbanyaknya kolom matriks yang pertama sama dengan banyaknyabaris matriks yang kedua danelemen-elemen matriks hasil kali diberikan seperti dalam Persamaan (2.39). Oleh karena itu bilamatriksAm,p dan matriksBp,n, maka perkalian kedua matriks ini diberikan oleh
Am,pBp,n =Cm,n, denganci, j =p
∑k=1
ai,kbk, j , i = 1,2, . . . ,mdan j = 1,2, . . . ,n.
Contoh 2.5.2
Diberikan matriks-matriks
A=
[1 2 35 3 4
]
,B=
2 13 75 6

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 53
Elemen baris ke-1 kolom ke-2 dan baris ke-2 kolom ke-1 matriks perkalianABdiberikan sebagaiberikut
AB=
[1 2 3
5 3 4
]
2 1
3 7
5 6
=
[� 3343 �
]
(1 �1)+(2 �7)+(3 �6) = 33
(5 �2)+(3 �3)+(4 �6) = 43
Dengan melakukan hal yang serupa didapat
AB=
[1 2 35 3 4
]
2 13 75 6
=
[23 3339 50
]
dan perkalian matriksBAdiberikan oleh
BA=
2 13 75 6
[1 2 35 3 4
]
=
7 7 1038 27 3735 28 39
terlihat bahwaAB 6= BA. Perkalian matriks tsb. dalam Maxima lakukan sebagai berikut:
(%i1) a:A=matrix([1,2,3],[5,3,4]); b:B=matrix([2,1],[3,7],[5,6]);ab:AB=rhs(a).rhs(b);ba:BA=rhs(b).rhs(a);
(%o1) A=
[1 2 35 3 4
]
(%o2) B=
2 13 75 6
(%o3) AB=
[23 3339 50
]
(%o4) BA=
7 7 1038 27 3735 28 39
Diberikan dua matriksAm,p dan Bp,n danC = Am,pBp,n, maka matriks baris ke-i dari Cdiberikan olehCi,∗ = Ai,∗B dan matriks kolom ke-j dariC diberikan olehC∗, j = AB∗, j .
Contoh 2.5.3
Diberikan matriks-matriks
A=
1 −2 0 72 3 2 10−5 11 1 8
,B=
2 1 10 2 25 0 81 12 −9
.
54
Bila C= AB, maka baris ke-2 dari matriksC diberikan oleh
C2,∗ = A2,∗B=[
2 3 2 10]
2 1 10 2 25 0 81 12 −9
=[
24 128 −66]
dan kolom ke-3 dariC diberikan oleh
C∗,3 = AB∗,3 =
1 −2 0 72 3 2 10−5 11 1 8
128−9
=
−66−66−47
Penghitungan ini dapat dilakukan dalam Maxima sebagai berikut:
(%i6) kill(all)$ a: A=matrix([1,-2,0,7],[2,3,2,10],[-5,11,1,8]);b:B=matrix([2,1,1],[0,2,2],[5,0,8],[1,12,-9]);a2:A["2,*"]=row(rhs(a),2);print(C["2,*"],"=",A["2,*"]*B,"=",rhs(a2).rhs(b))$b3:B["*,3"]=col(rhs(b),3);print(C["*,3"],"= A",B["*,3"],"=",rhs(a).rhs(b3))$
(%o1) A=
1 −2 0 72 3 2 10−5 11 1 8
(%o2) B=
2 1 10 2 25 0 81 12 −9
(%o3) A2,∗ =[2 3 2 10
], C2,∗ = A2,∗B=
[24 128 −66
]
(%o5) B∗,3 =
128−9
, C∗,3 = AB∗,3 =
−66−66−47
Perkalian matriks dan kombinasi linear sangat penting biladihubungkan dengan sistem per-samaan linear yang diberikan oleh Persamaan (2.9). Persamaan ini dapat ditulis dalam bentukperkalian matriks sebagai berikut
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n...
.... . .
...am,1 am,2 . . . am,n
x1
x2...
xn
=
b1
b2...
bm
. (2.40)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 55
Bila
A=
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n...
.... . .
...am,1 am,2 . . . am,n
, xxx=
x1
x2...
xn
danbbb=
b1
b2...
bm
,
maka Persamaan (2.40) dapat ditulis sebagaiAxxx= bbb. Selanjutnya bila
A∗, j =
a1, j
a2, j...
am, j
, j = 1,2, . . . ,n,
dan sistem persamaaan linear (2.40) mempunyai penyelesaian, maka matriksbbb dapat ditulis se-bagai kombinasi linear berikut
x1A∗,1+x2A∗,2+ . . .+xnA∗,n = bbb. (2.41)
Pembahasan yang lebih mendalam mengenai kombinasi linear akan diberikan pada bagian yangberikutnya, terutama saat pembahasan ruang vektor.
2.6 Matriks-matriks Khusus
Disini dikenalkan matriks nol, diagonal identitas(satuan), matriks segi-tiga dan matriks simetri.Suatu matriks yang semua elemenya sama dengan nol dinamakanmatriksnol. Berikut ini contohcontohnya
[0 0
],
[0 00 0
]
,
000
,
[0 0 0 00 0 0 0
]
.
Perintah dalam maxima untuk matriks nol dapat dilakukan sebagai berikut:
(%i21) o1:O["1x2"]=zeromatrix(1,2);o2:O["2x2"]=zeromatrix(2,2);o3:O["3x1"]=zeromatrix(3,1);o4:O["2x4"]=zeromatrix(2,4);
(%o21) O1×2 =[0 0
]
(%o22) O2×2 =
[0 00 0
]
(%o23) O3×1 =
000
(%o24) O2×4 =
[0 0 0 00 0 0 0
]

56
Suatu matriks persegiD berukurann×n dinamakan matriksdiagonalbila
D =
d1 0 0 · · · 00 d2 0 · · · 00 0 d3 · · · 0...
......
. . ....
0 0 0 · · · dn
Terlihat bahwa semua elemen dariD yang berada diatas dan dibawah elemen diagonal utamasama dengan nol yaitudi, j = 0, untuk i 6= j. Contoh
[1 00 2
]
,
−1 0 00 0 00 0 3
.
Perintah melakukan matriks diagonal dalam Maxima dapat dilakukan sebagai berikut:
(%i35) load(diag)$ diag([1,2];diag([-1,0,3]);
(%o36)
[1 00 2
]
(%o37)
−1 0 00 0 00 0 3
Suatu matriks diagonal dengan semua elemen diagonal utama sama dengan satu dinamakanmatrikssatuan(identitas). Contoh
[1 00 1
]
,
1 0 00 1 00 0 1
.
Dengan demikian matriks identitasI mempunyai elemenik,l = 1, k = l dan ik,l = 0, k 6= l . Pe-rintah melakukan matriks identitas dalam Maxima dapat dilakukan sebagai berikut:
(%i38) ident(2);ident(3);
(%o38)
[1 00 1
]
(%o39)
1 0 00 1 00 0 1
Suatu matriks persegiA dinamakan matrikssegi tiga atasbila
A=
a1,1 a1,2 · · · a1,n
0 a2,2 · · · a2,n...
.... . .
...0 0 · · · an,n
,

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 57
terlihat bahwa elemenai, j = 0, untuk i > j. Contoh
[−2 60 1
]
,
3 1 00 2 −50 0 4
,
1 2 4 −30 2 1 00 0 3 00 0 0 4
.
Suatu matriks persegiA dinamakan matrikssegi tiga bawahbila
A=
a1,1 0 · · · 0a2,1 a2,2 · · · 0
......
.. ....
an,1 an,2 · · · an,n
,
terlihat bahwa elemenai, j = 0, untuk i < j. Contoh
[2 0−3 1
]
,
3 0 01 2 06 0 4
,
1 0 0 01 2 0 02 −2 3 00 7 8 4
.
Suatu matriks transpose adalah matriks yang diperoleh darimatriks yang lain dengan elemenbaris menjadi elemen kolom dan sebaliknya. Matriks transpose dari suatu matriksA ditulis AT ,jadi bilaA= [ai, j ], makaAT = [a j ,i]. Contoh
A=
[1 2 −3 −40 −2 3 5
]
, AT =
1 02 −2−3 3−4 5
.
Perintah untuk melakukan matriks transpose dalam Maxima lakukakan sebagai berikut:
(%i2) a:A=matrix([1,2,-3,-4],[0,-2,3,5]);at:A^("T")=transpose(rhs(a));
(%o2) A=
[1 2 −3 −40 −2 3 5
]
(%o3) AT =
1 02 −2−3 3−4 5
Suatu matriks persegiA dinamakan matrikssimetribila A= AT . Contoh
A=
0 1 71 2 37 3 1
, AT =
0 1 71 2 37 3 1
.

58
Suatu matriks persegiA dinamakansimetri miring (skew symmetry)bila A=−AT . Contoh
A=
[0 1−1 0
]
, −AT =−
[0 −11 0
]
=
[0 1−1 0
]
= A.
Diberikan suatu matriks persegi
A=
a1,1 a1,2 a1,3 · · · a1,n
a2,1 a2,2 a2,3 · · · a2,n...
.... . . · · · ...
an,1 an,2 an,3 · · · an,n
,
trace dari matriksA ditulis trace(A) didefinisikan oleh
trace(A)def=
n
∑i=1
ai,i.
Contoh, misalkan matriks
A=
1 1 2−3 2 02 5 3
, trace(A) = 1+2+3= 6.
Perintah mendapatkan trace dari suatu matriks dalam Maximadilakukan sebagai berikut:
(%i7) load(functs)$ a:A=matrix([1,1,2],[-3,2,0],[2,5,4]);tra:"trace(A)"=tracematrix(rhs(a));
(%o8) A=
1 1 2−3 2 02 5 4
(%o9) trace(A) = 7.
Bila suatu matriks elemen-elemennya adalah bilangan kompleks, maka dikenal suatu matriksdengan nama konjugate transpose atau transpose konjugate.Hal ini berkenaan dengan suatukonjugate dari bilangan kompleks. Misalkan suatu bilangankompleksz∈ C denganz= a+bi, i =
√−1, maka konjugate dariz ditulis zdiberikan olehz= a−bi. Diberikan suatu matriks
A= [ai, j ], ai, j ∈ C,
maka konjugate dari matriksA adalah
Adef= [ai, j ]
dan matriksA∗ adalahA∗ def
= (A)T = AT .

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 59
Contoh, diberikan matriks
A=
[2− i 5+3i 2−7i3i 1+4i 2+3i
]
,
maka
A=
[2+ i 5−3i 2+7i−3i 1−4i 2−3i
]
, AT =
2− i 3i5+3i 1+4i2−7i 2+3i
dan
(A)T =
2+ i −3i5−3i 1−4i2+7i 2−3i
= AT = A∗.
Perintah konjugate matiks dalam maxima dapat dilakukan sebagai berikut:
(%i1) a:A=matrix([2-%i,5+3*%i,2-7*%i],[3*%i,1+4*%i,2+3*%i]);
(%o1) A=
[2− i 5+3i 2−7i3i 1+4i 2+3i
]
(%i4) ac:conjugate(rhs(a));
(%o4)
[i +2 5−3i 7i +2−3i 1−4i 2−3i
]
(%i7) at:transpose(rhs(a));
(%o7)
2− i 3i3i +5 4i +12−7i 3i +2
(%i6) transpose(ac);
(%o6)
i +2 −3i5−3i 1−4i7i +2 2−3i
(%i8) conjugate(at);
(%o8)
i +2 −3i5−3i 1−4i7i +2 2−3i
(%i12) A^("*")=conjugate(at);

60
(%o12) A∗ =
i +2 −3i5−3i 1−4i7i +2 2−3i
(%i13) A^("*")=transpose(ac);
(%o13) A∗ =
i +2 −3i5−3i 1−4i7i +2 2−3i
2.7 Sifat-sifat Aritmatika Matriks
Pada bagian ini dibahas lebih mendalam mengenai sifat sifataritmatika matriks. Diantaranyasifat komutatif, sifat assosiatif dan sifat elemen netral dari penjumlahan dua matriks. Juga diba-has sifat-sifat berkenaan dengan perkalian matriks baik dengan skalar ataupun matriks denganmatriks.
Teorema 2.7.1Bila A,B danC adalah matriks dengan ukuran yang sama dan elemen-elemennyaadalah bilangan real atau kompleks, maka
(1) A+B= B+A,
(2) A+(B+C) = (A+B)+C.
Bukti: MisalkanA= [ai, j ],B= [bi, j ] danC= [ci, j ]
(1) didapatA+B= [ai, j +bi, j ] = [bi, j +ai, j ] = B+A
(2) dan
(A+B)+C = [ai, j +bi, j ]+ci, j
= [(ai, j +bi, j)+ci, j ]
= [ai, j +(bi, j +ci, j)]
= A+(B+C).
Teorema 2.7.2Ada dengan tunggal matriks M berukuran m×n sedemikian hingga untuk setiapmatriks A berukuran m×n berlaku A+M = A.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 61
Bukti:Misalkan matriksM = [mi, j ] denganmi, j = 0 untuk semuai dan j. Maka untuk setiap matriksA= [ai, j ] didapat
A+M = [ai, j +mi, j ] = [ai, j +0] = [ai, j ] = A.
Untuk menentukan ketunggalan dariM, misalkan bahwa matriksB= [bi, j ] juga memenuhiA+
B= A untuk setiapA, maka khususnya didapatM+B= M, dilain pihakM+B= B. JadiB= M.
Teorema 2.7.3Bila A dan B masing-masing berukuran m×n, maka untuk setiap skalarα danβ
1. α(A+B) = αA+αB,
2. (α+β)A= αA+βA,
3. α(βA) = (αβ)A,
4. (−1)A= −A
5. 0A= 0m×n.
Bukti:MisalkanA= [ai, j ] danB= [bi, j ] didapat
1. α(ai, j +bi, j) = αai, j +αbi, j ⇒ α(A+B) = αA+αB,
2. (α+β)ai, j = αai, j +βai, j ⇒ (α+β)A= αA+βA,
3. α(βai, j) = (αβ)ai, j ⇒ α(βA) = (αβ)A,
4. (−1)ai, j =−ai, j ⇒ (−1)A= −A
5. 0ai, j = 0 ⇒ 0A= 0m×n.
Teorema 2.7.4Misalkan matriks A berukuran m×n, B berukuran n× p dan C berukuran p×q,maka A(BC) = (AB)C.

62
Bukti:Elemen ke-(i, j) dari matriksA(BC) adalah
[A(BC)]i, j =n
∑r=1
ai,r [BC]r, j
=n
∑r=1
ai,r
(p
∑s=1
br,scs, j
)
=n
∑r=1
p
∑s=1
ai,rbr,scs, j .
Sedangkan elemen ke-(i, j) dari matriks(AB)C adalah
[(AB)C]i, j =p
∑s=1
[AB]i,scs, j
=p
∑s=1
(n
∑r=1
ai,rbr,s
)
cs, j
=p
∑s=1
n
∑r=1
ai,rbr,scs, j
=n
∑r=1
p
∑s=1
ai,rbr,scs, j .
Didapat
[A(BC)]i, j = [(AB)C]i, j untuk semuai, j.
JadiA(BC) = (AB)C.
Dari hasil Teorema2.7.4, maka matriksA(BC) dan(AB)C cukup ditulisABC. Juga matriks
sebanyakn︷ ︸︸ ︷
AAA· · ·A,
dengann adalah bilangan bulat positip ditulisAn.
Teorema 2.7.5Bila matriks A berukuran m× n, matriks B dan C masing-masing berukurann× p, maka
A(B+C) = AB+AC

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 63
Bukti:Elemen[A(B+C)]i, j diberikan oleh
[A(B+C)]i, j =n
∑k=1
ai,k[B+C]k, j
=n
∑k=1
ai,k(bk, j +ck, j)
=n
∑k=1
ai,kbk, j +n
∑k=1
ai,kck, j)
= [AB]i, j +[AC]i, j= [AB+AC]i, j .
Terlihat bahwaA(B+C) = AB+AC.
Hal serupa dapat dibuktikan bahwa bila matriksA,B danC dengan ukuran yang sesuai, maka
(B+C)A= BA+CA.
Teorema 2.7.6Bila perkalian AB terdefinisi, maka untuk skalarλ didapat
λ(AB) = (λA)B= A(λB).
Bukti:Elemen ke-(i, j) dari tiga hasil kali tsb. adalah
λ
(n
∑k=1
ai,kbk, j
)
=n
∑k=1
(λai,k)bn, j =n
∑k=1
ai,k(λbk, j).
Teorema 2.7.7Ada dengan tunggal matriks M berukuran n×n dengan sifat untuk setiap ma-triks A berukuran n×n, maka
AM = A= MA.
Bukti:Misalkan matriks berukurann×n
M =
1 0 0 · · · 00 1 0 · · · 00 0 1 · · · 0...
......
. . .0 0 0 · · · 1
.

64
Lebih tepatnya, bila didefinisikan simbolKroneckerδi, j oleh
δi, j =
{1 bila i = j,0 bila i 6= j,
maka didapatM = [δi, j ]n×n. Bila A= [ai, j ]n×n, maka
[AM]i, j =n
∑k=1
ai,kδk, j
= ai,1δ1, j +ai,2δ2, j + · · ·+ai, jδ j , j + · · ·+ai,nδn, j
= ai,10+ai,20+ · · ·+ai, j1+ · · ·+ai,n0
= ai, j .
JadiAM = A dengan cara serupa didapatMA= A. Untuk menunjukkan ketunggalan matriksM,misalkan bahwa matriksP berukurann×n juga mempunyai sifat
AP= A= PA, untuk setiap matriksA berukurann×n.
Khususnya didapatMP = M = PM, tetapiM juga mempunyai sifatPM = P = MP. Hal inimenunjukkan bahwaP= M.
Sebagaimana telah dibahas sebelumnya, matriksM adalah matriks identitas (satuan) dan se-lanjutnya dinotasikan olehIn×n.
Teorema 2.7.8Bila penjumlahan dan perkalian matriks terdefinisi, maka
(AT)T = A, (A+B)T = AT +BT . (λA)T = λAT , (AB)T = ATBT .
Bukti:Bila A= [ai, j ] danB= [bi, j ] didapat
(AT)T = [a j ,i]T = [ai, j ] = A.
MisalkanA+B= [ai, j ]+ [bi, j ] = [ci, j ] =C, didapat
(A+B)T =CT = [c j ,i] = [a j ,i]+ [b j ,i] = AT +BT .
(λA)T = [λai, j ]T = [λa j ,i] = λ[a j ,i] = λAT .
MisalkanA= [ai, j ]m×n danB= [bi, j ]n×p, didapat
[AB] j ,i =n
∑k=1
a j ,kbk,i =n
∑k=1
bk,ia j ,k = [BTAT ]i, j ,
terlihat bahwa(AB)T = BTAT .

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 65
Hasil Teorema2.7.8memeberikan suatu kesimpulan bahwa untuk sebarang matrikspersegiA, maka matriksA+AT adalah matriks simetri dan matriksA−AT adalah matriks simetri miring(skew symmstric). Sebab
(A+AT)T = AT +(AT)T = AT +A= A+AT ,
dan
(A−AT)T = AT −(AT)T = AT −A= −(A−AT).
2.8 Matriks Invers dan Matriks Elementer
Pada bagian ini diberikan pengertian matriks invers dan beberapa sifat-sifatnya. Cara memper-oleh matriks invers dibahas pada bagian berikutnya.
Disini juga dikenalkan ide dari matriks elementer. Matriksini dapat digunakan untuk mem-peroleh matriks invers.
Definisi 2.8.1 Bila untuk suatu matriks persegi A bisa didapat matriks persegi yang lain Bsedemikian hingga memenuhi
AB= BA= I ,
maka B dinamakaninvers dari A, dalam hal ini matriks A dinamakan matriksnonsingulir.Sebaliknya bila tidak ada matriks B tsb., maka matriks A dinamakan matrikssingulir.
Perluh diperhatikan bahwa pembahasan disini berkaitan dengan matriks invers hanya untuk ma-triks persegi. Dalam pengertian matriks invers, maka matriksB juga nonsingulir dan mempunyaiinversA.
Berikut ini diberikan sifat ketunggalan dari matriks invers.
Teorema 2.8.1Misalkan A nonsingulir dan B begitu juga C masing-masing adalah invers dariA, maka B=C.
Bukti:KarenaB adalah invers dariA, makaAB= I . Bila kedua ruas dariAB= I dikalikan denganCdidapat
C(AB) =CI =C.
Tetapi dengan menggunakan sifat assosiatif didapat
C(AB) = (CA)B= IB = B.
Terlihat bahwaC=CAB= B atauC= B.

66
Matriks invers dari suatu matriksA dinotasikan olehA−1.
Contoh 2.8.1 Diberikan matriks
A=
[1 23 4
]
,
maka
A−1 =
[−2 1
32 −1
2
]
.
Hal ini bisa dicek sebagai berikut
AA−1 =
[1 23 4
][−2 1
32 −1
2
]
=
[1 00 1
]
= I2×2
dan
A−1A=
[−2 1
32 −1
2
][1 23 4
]
=
[1 00 1
]
= I2×2
Contoh 2.8.2 Diberikan matriks
B=
0 0 20 1 20 3 1
,
maka matriks B adalah singulir. Hal ini bisa ditunjukkan sebagai berikut: Andaikan B nonsingulir, maka ada matriks
C=
c1,1 c1,2 c1,3
c2,1 c2,2 c2,3
c3,1 c3,2 c3,3
yang memenuhi CB= I3×3. Kolom ke-1 dari matriks CB diberikan oleh
[CB]∗,1 =CB∗,1 =
c1,1 c1,2 c1,3
c2,1 c2,2 c2,3
c3,1 c3,2 c3,3
000
=
000
6=
100
.
Hasil ini cukup menunjukkan bahwa CB6= I3×3. Jadi matriks B singulir.
Bila A nonsingulir, maka untukn bilangan bulat positipA−n didefisikan sebagai
A−n = (A−1)n = A−1A−1 · · ·A−1︸ ︷︷ ︸
sebanyakn
Berikut ini diberikan sifat-sifat yang berkaitan dengan matriks invers.
Teorema 2.8.2Misalkan matriks A dan B masing-masing adalah matriks nosingulir, maka
1. AB adalah nonsingulir dan(AB)−1 = B−1A−1.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 67
2. A−1 adalah nonsingulir dan(A−1)−1 = A.
3. Untuk n= 1,2, · · · , An adalah nonsingulir dan(An)−1 = A−n = (A−1)n.
4. Bila λ 6= 0, makaλA nonsingulir dan(λA)−1 = 1λA−1.
5. AT adalah nonsingulir dan(AT)−1 = (A−1)T .
Bukti:
1.(AB)(B−1A−1) = A(BB−1)A−1 = AIA−1 = AA−1 = I
dan(B−1A−1)(AB) = B−1(AA−1)B= B−1IB = B−1B= I
Terlihat bahwa invers dariAB, yaitu(AB)−1 = B−1A−1.
2. Invers dariA−1 adalah(A−1)−1 dengan demikian
(A−1)−1A−1 = I = A−1(A−1)−1
Tetapai jugaAA−1 = I = A−1A
Terlihat bahwa(A−1)−1 = A.
3. Perluh ditunjukkan bahwaAnA−n = I = A−nAn, sebagai berikut
AnA−n =
AA· · ·A︸ ︷︷ ︸
sebanyakn
A−1A−1 · · ·A−1︸ ︷︷ ︸
sebanyakn
=
AA· · ·A︸ ︷︷ ︸
sebanyakn−1
(AA−1)
A−1A−1 · · ·A−1︸ ︷︷ ︸
sebanyakn−1
, tetapiAA−1 = I
=
AA· · ·A︸ ︷︷ ︸
sebanyakn−1
A−1A−1 · · ·A−1︸ ︷︷ ︸
sebanyakn−1
...
= (AA)(A−1A−1)
= A(AA−1)A−1, juga AA−1 = I
= AA−1
= I .
Dengan cara serupa dapat ditunjukkan bahwaA−nAn = I , dengan demikian invers dariAn
yaitu (An)−1 = A−n.

68
4. Juga, cukup ditunjukkan bahwa(λA)(1λA−1) = I = (1
λA−1)(λA) sebagai berikut
(λA)(1λ
A−1) = (λ1λ)(AA−1) = 1I = I .
Juga
(1λ
A−1)(λA) = (1λ
λ)(A−1A) = 1I = I .
Terlihat bahwa invers dariλA yaitu (λA)−1 = 1λA−1.
5. Cukup ditunjukkan bahwaAT(A−1)T = I = (A−1)TAT sebagai berikut
AT(A−1)T = (A−1A)T = IT = I ,
juga(A−1)TAT = (AA−1)T = IT = I .
Terlihat bahwa invers dariAT yaitu (AT)−1 = (A−1)T .
Catatan, hasil(AB)−1 = B−1A−1 dapat diperluas untuk lebih dari dua matriks, misalnya(ABC)−1 =C−1B−1A−1.
Sebegitu jauh pembahasan sifat-sifat belum membahas suatuhukum penghapusan atau pem-faktoran dari suatu matriks nol. Kedua sifat ini diberikan berikut.
Teorema 2.8.3Misalkan A adalah matriks nonsingulir dan B,C dan D matriks yang berukuransama seperti matriks A. Maka
1. bila AB= AC, maka B=C,
2. bila AD=0, maka D= 0
Bukti:
1. Kedua ruas persamaanAB= AC
kalikan dari kiri denganA−1 didapat
A−1AB = A−1AC
IB = IC
B = C.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 69
2. Kedua ruas persamaanAD= 0
kalikan dari kiri denganA−1 didapat
A−1AD = A−10
ID = 0
D = 0.
Perhatikan bahwa Teorema ini disyaratkan untukA nonsingulir. Perluh diingat kembalibahwa perkalian dua matriks tidak komutatif. Oleh karena itu bila AB= CA tidak ada alasanmenyimpulkanB = C bahkan untuk matriksA yang nonsingulir. Hal ini bisa dilihat sebagaiberikut
A−1AB = A−1CA
B = A−1CA
atau
ABA−1 = CAA−1
ABA−1 = C
Untuk kedua hal tsb. tidak bisa disimpulkanB=C.
Berikut ini dibahas pengertian matriks elementer. Matriksini erat kaitannya dengan OperasiBaris Elementer (OBE) dan salah satu kegunaannya adalah untuk menentukan invers suatu ma-triks persegi.
Definisi 2.8.2 Suatu matriks persegi dinamakan matriksElementerbila matriks ini diperolehdari matriks identitas dengan melakukan suatu operasi baris elementer pada matriks identitastsb.
Berikut ini beberapa contoh matriks elementer[1 00 1
]3B1−→
[3 00 1
]
,
1 0 00 1 00 0 1
B2⇔B3−→
1 0 00 0 10 1 0
,
1 0 0 00 1 0 00 0 1 00 0 0 1
B4−4B3−→
1 0 0 00 1 0 00 0 1 00 0 −4 1
.

70
Operasi Baris Elementer dari suatu matriks juga khususnya matriks identits ada tiga macam,yaitu pertukaran antar baris, suatu baris kalikan dengan skalar taknol dan tambahkan suatu barisdengan hasil dari suatu baris yang lain kali dengan skalar tak nol.
MisalkanA matriks berukuranm×n danemenyatakan suatu baris elementer padaA. Matrikshasil dari OBEepadaA ditulis e(A) dan hasil matriks OBEepada matriks identitasIm×m ditulise(Im×m. Jelas bahwae(Im×m adalah matriks elementer. Sifat berikut menjelaskan hubungane(A)dengane(Im×m.
Teorema 2.8.4Bila E = e(Im×m), maka e(A) = EA.
Bukti: Misalkan untuki = 1,2, · · ·m, Ai,∗, adalah baris ke-i dari matriksA danIi,∗ adalah bariske-i dari matriks identitasIm×m, makaIi,∗A= Ai,∗.
1. Misalkaneadalah OBE dari pertukaran antara baris ke-i dengan baris ke-j, didapat
E = e(Im×m) =
I1,∗I2,∗...
I j ,∗...
Ii,∗...
Im,∗
dan e(A) =
A1,∗A2,∗
...A j ,∗
...Ai,∗
...Am,∗
.
Jadi
EA=
I1,∗ AI2,∗ A
...I j ,∗ A
...Ii,∗ A
...Im,∗ A
=
A1,∗A2,∗
...A j ,∗
...Ai,∗
...Am,∗
= e(A).
2. Misalkaneadalah OBE dari baris ke-i dikalikan dengan skalar taknolλ, didapat
E = e(Im×m) =
I1,∗I2,∗...
λIi,∗...
Im,∗
dan e(A) =
A1,∗A2,∗
...λAi,∗
...Am,∗
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 71
Jadi
EA=
I1,∗ AI2,∗ A
...(λIi,∗)A
...Im,∗ A
=
A1,∗A2,∗
...λ(Ii,∗ A)
...Am,∗
=
I1,∗ AI2,∗ A
...(λIi,∗)A
...Im,∗ A
=
A1,∗A2,∗
...λAi,∗
...Am,∗
= e(A)
3. Misalkaneadalah OBE dari baris ke-j menjadiλ kali baris ke-i ditambah baris ke-j denganλ 6= 0, didapat
E = e(Im×m) =
I1,∗I2,∗...
Ii,∗...
λIi,∗+ I j ,∗...
Im,∗
dan e(A) =
A1,∗A2,∗
...Ai,∗
...λAi,∗+A j ,∗
...Am,∗
.
Jadi
EA=
I1,∗ AI2,∗ A
...Ii,∗ A
...(λIi,∗+ I j ,∗) A
...Im,∗ A
=
A1,∗A2,∗
...Ai,∗
...λ(Ii,∗ A)+ I j ,∗ A
...Am,∗
=
A1,∗A2,∗
...Ai,∗
...λAi,∗+A j ,∗
...Am,∗
= e(A).
Hasil penting Teorema2.8.4adalah suatu operasi baris elementer dapat diganti oleh matrikselementer yang sesuai yaitu
e(A) = EA
pada persamaan ini,emenyatakan suatu operasi baris elementer yang dikenakan pada matriksAsedangkanE adalah matriks elementer yang sesuai dan memberikan hasil matriksE dikalikandenganA yaitu EA sama dengane(A). Hasil-hasil yang telah didapat ini berlaku juga untukserangkaian operasi baris elementer, misalnyae(1),e(2), · · · ,e(k) yang dikenakan pada matriksAyaitu
e(k)e(k−1) · · ·e(1)(A),

72
bila matriks elementer yang sesuai dengan rangakaian operasi baris elementer tsb. adalah
E1,E2, · · · ,EK,
makae(k)e(k−1) · · ·e(1)(A) = (EkEk−1 · · ·E1)A.
Sebagaimana telah diketahui bahwa metoda Gauss ataupun Gauss Jordan untuk menyelesaikansuatu sistem persamaan linear pada dasarnya mengubah sistem persamaan ini kebentuk sistempersamaan linear lainnya yang ekivalen dengan melakukan serangkaian operasi baris elementer.Berikut ini dibahas lagi Contoh2.2.1yaitu
x2−x3 = 3−2x1+4x2−x3 = 1
−2x1+5x2−4x3 = −2,
tetapi sekarang diselesaikan menggunakan serangkain matriks elementer. Matriks diperbesardari sistem persamaan linear adalah
Ab=
0© 1 −1−2 4 −1−2 5 −4
∣∣∣∣∣∣
31
−2
.
Matriks -matriks elementer yang sesuai sebagaimana telah dilakukan OBE pada Contoh2.2.1adalah
E1 =
0 1 01 0 00 0 1
,E2 =
1 0 00 1 0−1 0 1
,E3 =
1 0 00 1 00 −1 1
.
Didapat
E3E2E1Ab =
1 0 00 1 00 −1 1
1 0 00 1 0−1 0 1
0 1 01 0 00 0 1
0 1 −1 3−2 4 −1 1−2 5 −4 −2
=
−2 4 −1 10 1 −1 30 0 −2 −6
Dari hasil ini, lakukan substitusi mundur, didapat
x3 =−6−2 = 3,
x2 = 3+x3 = 3+3= 6,x1 = −1
2(1−4x2+x3) = −12(1−24+3) = 10.
Terlihat memberikan hasil yang sama seperti telah dibahas pada Contoh2.2.1.
Berikut ini diberikan sifat dari matriks elementer yang berkaitan dengan invers matriks.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 73
Teorema 2.8.5Suatu matriks elementer adalah nonsingulir.
Bukti:Ada tiga macam operasi baris elementer, pertama OBE yang berkenaan dengan pertukaran antarabaris ke-i dengan baris ke-j pada suatu matriksA. Misalkan operasi ini dinotasisikan denganedan bila dilakukan sekali lagie padae(A) menghasilakn matriksA lagi. Bila I adalah matriksidentitas ukurann×n, didapat matriks elementer
E1 = e(I) =
I1,∗I2,∗...
I j ,∗...
Ii,∗...
In,∗
dan
e(E1) =
I1,∗I2,∗...
Ii,∗...
I j ,∗...
In,∗
= I ,
tetapie(E1) = e(I)E1 = E1E1. JadiE1E1 = I , dengan demikianE−11 = E1 atauE1 adalah non
singulir. Selanjutnya, misalkane(1) adalah OBE pada suatu matriks, yaitu mengalikanλ 6= 0dengan baris ke-i dane(2) adalah OBE pada suatu matriks, yaitu mengalikan1
λ dengan baris ke-i.Bila I adalah matriks identitas ukurann×n, didapat matriks elementer
E1 = e(1)(I) =
I1,∗I2,∗...
λIi,∗...
In,∗
74
dan
e(2)(E1) =
I1,∗I2,∗...
1λ(λIi,∗)
...In,∗
=
I1,∗I2,∗...
Ii,∗...
In,∗
= I ,
tetapi jugae(2)(E1) = e(2)(I)E1.
Bila e(2)(I) = E2, makaE2E1 = I , dengan demikianE−11 = E2 atauE1 adalah non singulir. Ter-
akhir, misalkane(1) adalah OBE pada suatu matriks, yaitu mengalikanλ 6= 0 dengan baris ke-iditambahkan pada baris ke-j dane(2) adalah OBE pada suatu matriks, mengalikan−λ denganbaris ke-i ditambahkan pada baris ke-j Bila I adalah matriks identitas ukurann× n, didapatmatriks elementer
E1 = e(1)(I) =
I1,∗I2,∗...
Ii,∗...
λIi,∗+ I j ,∗...
In,∗
dan
e(2)(E1) =
I1,∗I2,∗...
Ii,∗...
−λIi,∗+λIi,∗+ I j ,∗...
In,∗
=
I1,∗I2,∗...
Ii,∗...
I j ,∗...
In,∗
= I ,
tetapi jugae(2)(E1) = e(2)(I)E1.
Bila e(2)(I) = E2, makaE2E1 = I , dengan demikianE−11 = E2 atauE1 adalah non singulir.
Contoh 2.8.3 Perluh diperhatikan bahwa OBE dari pertukaran diantara baris i dengan baris jtidak selalu bahwa i dan j tidak sama. Secara umum boleh sama boleh tidak.Diberikan matriks

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 75
elementer
E1 =
0 0 10 1 01 0 0
,E2 =
1 0 00 −2 00 0 1
, dan E3 =
1 0 50 1 00 0 1
,
maka
E−11 =
0 0 10 1 01 0 0
,E−12 =
1 0 00 2 00 0 1
, dan E−13 =
1 0 −50 1 00 0 1
.
Telah dibahas bahwa, bila serangkaian OBE dikenakan pada suatu Sistem Persamaan Linear(SPL) didapat suatu sistem persamaan linear yang ekivalen dengan SPL sebelumnya dan dariSPL yang terakhir ini didapat penyelesaian (bila ada) dari SPL yang dibahas. Juga, telah dike-tahui bahwa rangkaian OBE yang dikenakan pada SPL dapat diganti oleh serangkaian matrikselementer yang sesuai selanjutnya dikalikan dengan matriks diperbesar dari SPL tsb. Hasilakhirnya adalah suatu matriks yang tepat sama seperti hasilakhir dari bila serangkaian OBEdikenakan pada SPL yang ada. Oleh karena itu, tidak berlebihann bila didefinisikan hal berikut.
Definisi 2.8.3 Bila A adalah suatu matriks berukuranm×n dan padaA dikenakan serangkaianmatriks elementerE1,E2, · · · ,Ek, maka dikatakanA ekivalen-barisdengan matriks
E1E2 · · ·EkA.
Dalam hal ini bilaA baris-ekivelen denganB ditulis
A∼barisB.
Teorema2.8.5menjelaskan bahwa, suatu matriks elementerE adalah nonsingulir, artinya adaE−1 sehinggaE−1E = I = EE−1, Disini matriksE−1 juga merupakan matriks elementer dengantipe yang sama seperti tipe dari matriks elementerE. Berikut ini ditunjukkan bahwa ekivalen-baris adalah suatu relasi ekivalen.
Teorema 2.8.6Ekivalen-baris adalah suatu relasi ekivalen.
Bukti:MisalkanMm×n(C) adalah himpunan dari semua matriks berukuranm×n dengan elemen-elemendi C dan∼baris relasi padaMm×n(C). Ditunjukkan bahwa∼baris relasi ekivalen. MisalkanA,BdanC di Mm×n(C), didapat
1. jelas bahwa matriks identitasI = In×m juga merupakan matriks elementer. Didapat
A= IA dan A= I−1A.
Terlihat bahwaA∼barisA.

76
2. Bila A∼baris B, makaB = E1E2 · · ·EkA untuk beberapa matriks elementerEi dengani =1,2, · · · ,k. Sebagaimana telah diketahuiE−1
1 juga matriks elementer dan
(E1E2 · · ·Ek)−1 = E−1
k E−1k−1 · · ·E−1
1 .
JadiA= E−1
k E−1k−1 · · ·E−1
1 B.
Terlihat bahwaB∼barisA,
3. MisalkanA∼baris B danB∼barisC makaB = E1E2 · · ·EpA untuk beberapa matriks ele-menterEi dengani = 1,2, · · · , p danC=Ec1Ec2 · · ·EcqB untuk beberapa matriks elementerEci dengani = 1,2, · · · ,q. Didapat
A = E−1p E−1
p−1 · · ·E−11 B
= E−1p E−1
p−1 · · ·E−11 E−1
cq · · ·E−1c2 E−1
c1 C︸ ︷︷ ︸
B
.
Terlihat bahwaA∼barisC.
Contoh 2.8.4 Diberikan matriks
A=
[4 3 −2−1 5 8
]
dan B=
[4 3 −214 −1 −22
]
.
Perhatikan matriks elementer berikut
E1 =
[1 00 −2
]
, E−11 =
[1 00 −1
2
]
dan
E2 =
[1 03 1
]
, E−12 =
[1 0−3 1
]
.
Didapat
E2E1A =
[1 03 1
][1 00 −2
][4 3 −2−1 5 8
]
=
[1 03 1
][4 3 −22 −10 −16
]
=
[4 3 −214 −1 −22
]
= B
dan
E−11 E−1
2 B =
[1 00 −1
2
][1 0−3 1
][4 3 −214 −1 −22
]
=
[1 00 −1
2
][4 3 −22 −10 −16
]
=
[4 3 −2−1 5 8
]
= A.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 77
Terlihat bahwaA∼bar B danB∼bar A.
2.9 Mendapatkan Matriks Invers
disini dikembang suatu cara untuk memperoleh matriks invers.
2.10 DekomposisiLU
disini dibahas suatu cara untuk memfaktorkan suatu matriksbujur sangkar menjadi suatu produkdari suatu matriks segitiga bawahL dan matriks segitiga atasU . Pemfaktoran yang demikianbisa digunakan untuk menyelesaikan sistem persamaan.
2.11 Peninjauan Ulang Sistem Persamaan
disini ditinjau ulang penyelesaian sistem persamaan dan bagaimana matriks invers dan dekompo-sisi LU bisa membantu proses penyelesaian sistem persamaan. Juga dibahas beberapa ide yanglain untuk meyelesaikan sistem persamaan.

78
Bab 3Determinan
3.1 Fungsi Determinan
disini diberikan pengertian formal determinan juga diberikan suatu formula menghitung deter-minan matriks 2×2 dan 3×3.
3.2 Sifat-sifat Determinan
disini dibahas beberapa sifat fungsi determinan diantaranya adalah suatu formula untuk menen-tukan determinan dari matriks segitiga.
3.3 Metode Kofaktor
disini dibahas metoda pertama untuk menghitung determinanmatriks.
3.4 Reduksi Baris Untuk Menghitung Determinan
disisni dibahas metoda kedua untuk menghitung determinan matriks.
3.5 Aturan Cramer
disini dibahas cara yang lain untuk menyelesaikan sistem persamaan dengan menggunakan de-terminan.
79

80
Bab 4Ruang-n Euclide
4.1 Vektor
disisni dikenalkan vektor dalam ruang-2 dan ruang-3 begitujuga beberapa ide penting mengenaivektor-vektor ini.
4.2 Perkalian Titik dan Perkalian Silang
disini dibahas pengertian perkalian titik dan perkalian silang dari dua vektor juga pemakaian dariperkalian titik.
4.3 Ruang-n Euclide
disini dikenalkan ide dari ruang-nEuclide dam beberapa perluasan ide dari pembahasan sebelum-nya.
4.4 Transformasi Linear
disini dikenalkan topik dari transformasi linear dan beberapa sifat-sifatnya.
4.5 Contoh-contoh Transformasi Linear
disini diberikan beberapa contoh transformasi linear.
81

82
Bab 5Ruang Vektor
5.1 Lapangan(Field)
Suatu lapangan adalah suatu himpunanK 6= /0 bersama-sama dengan dua operasitambah(+) dankali (.) sehingga untuk semuaa,b,c∈ K memenuhi:
• (a+b) ∈ K (tertutup).
• a+b= b+a (komutatif).
• (a+b)+c= a+(b+c) (assosiatif).
• Ada 0∈ K sehinggaa+0= 0+a= a (elemen netral).
• Untuk setiapa∈ K ada suatu−a∈ K sehinggaa+(−a) = −a+a= 0 (invers).
• (a.b) ∈ K (tertutup).
• a.b= ba (komutatif).
• (a.b).c= a.(b.c) (assosiatif).
• Ada 1∈ K sehinggaa.1= 1.a= a (elemen identitas).
• Bila a 6= 0, maka adaa−1 ∈ K sehinggaa.a−1 = a−1.a= 1 (invers).
• a.(b+c) = (a.b)+(a.c) (distributif).
Contoh-contoh Lapangan
1. Himpunan bilangan rasionalQ, himpunan bilangan riilR dan himpunan bilangan kom-pleksC.
83

84
2. Himpunan bilangan bulat modulop dinotasikan olehZp, denganp bilangan prima.
Contoh 1. adalah lapangan takhingga sedangkan Contoh 2. lapangan hingga. Dalam Contoh 2.,bila p bukan bilangan prima, makaZp bukan lapangan.
5.2 Ruang Vektor
Suatu himpunanV dengan dua operasitambahdankali dikatakan suatu ruang vektor atas lapan-ganK bila memenuhi:
1. Bilauuu,vvv,www∈V, makauuu+vvv∈V dan
· uuu+vvv= vvv+uuu
· (uuu+vvv)+www= uuu+(vvv+www)
· Ada 000∈V sehinggavvv+000= vvv= 000+vvv,∀vvv∈V
· Untuk setiapvvv∈V adawww∈V sehinggavvv+www=www+vvv=000 (biasanyawww ditulis sebagai−vvv).
2. Bila a,b∈ K danuuu,vvv∈V, makaavvv∈V dan
· (a+b)vvv= avvv+bvvv
· a(uuu+vvv) = avvv+auuu
· (ab)vvv= a(bvvv)
· 1vvv= vvv
Contoh-contoh Ruang Vektor
1. HimpunanR2 adalah ruang vektor atas lapanganR, dengan
(x1
x2
)
+
(y1
y2
)
def=
(x1+y1
x2+y2
)
,∀(
x1
x2
)
,
(y1
y2
)
∈ R2
dan
a
(x1
x2
)
def=
(ax1
ax2
)
,∀a∈ K dan∀(
x1
x2
)
∈ R2.
2. HimpunanRn juga ruang vektor atasR dengan definisi operasi tambah dan kali diberikanseperti di Contoh 1. Penambahan dalam Contoh 1. dinamakanpenambahan secara kom-ponen yang bersesuaian.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 85
3. Himpunan matriksm×n dengan elemen elemennya bilangan riil
Mm,n(R) =
a11 . . . a1n...
. . ....
am1 . . . amn
∣∣∣∣∣∣∣
ai j ∈ R
dan doperasi penambahan matriks diberikan oleh:
a11 . . . a1n...
. . ....
am1 . . . amn
+
b11 . . . b1n...
. . ....
bm1 . . . bmn
def=
a11+b11 . . . a1n+b1n...
. . ....
am1+bm1 . . . amn+bmn
sedangkan perkalian skalarα ∈ R dengan matriks diberikan oleh:
α
a11 . . . a1n...
. . ....
am1 . . . amn
def=
αa11 . . . αa1n...
. . ....
αam1 . . . αamn
.
MakaMm,n(R) adalah suatu ruang vektor atas lapanganR.
4. MisalkanF adalah suatu lapangan dan himpunan semua fungsi, yaitu
V = { f : F→ F}
dengan
( f +g)(x)def= f (x)+g(x),∀x∈ F
dan(α f )(x)
def= α f (x),α ∈ F .
MakaV adalah ruang vektor atasF.
5. MisalkanF adalah suatu lapangan dan himpunan semua polinomial berderajad kurang atausama dengann yaitu
Pn(F) = {p(x) = a0+a1x+ . . .+anxn |ai ∈ F}
dengan
(p+q)(x)def= p(x)+q(x),∀x∈ F
dan(αp)(x)
def= αp(x),α ∈ F .
MakaPn(F) adalah ruang vektor atasF.

86
6. Himpunanl∞ = {a= (a1,a2, . . .) |an ∈ R,sup(|an|)< ∞}
dengan
a+bdef= (a1+b1,a2+b2, . . .)
danαa
def= (αa1,αa2, . . .),α ∈ R.
Maka l∞ adalah ruang vektor atas lapanganR.
7. Himpunan fungsi terdifferensial tak berhingga kali padainterval [a,b], yaitu C∞[a,b],definisi penambahan fungsi dan perkalian skalar dengan fungsi seperti dalam Contoh 4.merupakan ruang vektor atas lapangan riilR.
8. Himpunan fungsi-fungsi
V =
{
f : R→R
∣∣∣∣
d2 fdx2 + f = 0
}
definisi penambahan fungsi dan perkalian skalar dengan fungsi seperti dalam Contoh 4.merupakan ruang vektor atas lapangan riilR.
Berikut ini diberikan beberapa sifat dari suatu ruang vektor V atas lapanganK. MisalkanVadalah suatu ruang vektor atas lapanganK, maka
(1). 0vvv= 000, 0 adalah elemen netral diK danvvv∈V.
(2). (−1vvv)+vvv= 000, dengan−1∈ K.
(3). α000= 000, denganα ∈ K.
Bukti
(1). vvv= (1+0)vvv= vvv+0vvv, kedua ruas tambahkan dengan vektorwww yang memenuhiwww+vvv= 000,didapat:www+vvv=www+vvv+0vvv atau 000= 000+0vvv. Terlihat bahwa 0vvv= 000.
(2). (−1vvv)+vvv= (−1+1)vvv= 0vvv= 000.
(3). α000= α(0000) = (α ·0)000= 0000= 000.
5.3 Ruang Bagian (Subspace)
MisalkanV suatu ruang vektor atas lapanganK. HimpunanS⊂V (S 6= /0) dikatakan suaturuangbagianbila Ssendiri dengan operasi tambah dan kali seperti diV tetap merupakan ruang vektoratasK.
Contoh-contoh Ruang Bagian

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 87
1. Himpunan
B=
xyz
∣∣∣∣∣∣
x+y+z= 0
adalah ruang bagian dari ruang vektorR3 atasR.
2. Misalkan ruang vektor dari semua himpunan fungsi yaitu
V = { f : R→ R}
danD⊂V, dengan
D =
{
f ∈V
∣∣∣∣
d2 fdx2 + f = 0
}
,
makaD adalah ruang bagian dari ruang vektorV atasR.
3. HimpunanP3(R) adalah ruang bagian dari ruang vektorPn(R) atas lapanganR dengann≥ 3.
4. Himpunan
S={
(an) ∈ l∞∣∣∣ lim
n→∞an = x,x∈ R
}
adalah ruang bagian dari ruang vektorl∞ atas lapanganR.
5. HimpunanS= {x∈ Rn |Ax= 000,A∈Mm,n(R)}
adalah ruang bagian dari ruang vektorRn atas lapanganR.
6. Himpunan titik yang melalui garis 3x+2y= 0 yaitu
S={(2t,−3t)′ ∈ R2 | t ∈ R
}
adalah ruang bagian dari ruang vektorR2 atas lapanganR.
Gambar 5.1: Ruang Bagian
Berikut ini diberikan suatu sifat (pernyataan) yang ekivalen dengan pernyataan dari suatu ruangbagian.

88
HimpunanSadalah suatu ruang bagian dari suatu ruang vektorV atas lapanganK bila dan hanyabila
x1sss1+x2sss2 ∈ S
untuk setiapx1,x2 ∈ K dansss1,sss2 ∈ S.
BuktiMisalkanSruang bagian dan
x1,x2 ∈ K juga sss1,sss2 ∈ S,
makax1sss1 ∈ S dan x2sss2 ∈ S.
Oleh karena itu,x1sss1+x2sss2
juga diS. Sebaliknya, misalkanx1sss1+x2sss2 ∈ S
untuk setiapx1,x2 ∈ K dansss1,sss2 ∈ S. Akan ditunjukkan bahwaS adalah ruang vektor atasK.Sifat 2. dari ruang vektor otomatis diwarisi dariV, begitu juga sifat komutatif, assosiatif di sifat1., diwarisi dariV. Untukx1 = x2 = 1, didapat
1sss1+1sss2 = sss1+sss2 ∈ S (tertutup).
Untukx1 = x2 = 0 didapat0sss1+0sss2 = 0(sss1+sss2) = 000∈ S.
Oleh karena itu, untukx1 = x2 = 1 dan setiapsss∈ S, didapat
1sss+1000= sss+000= sss= 000+sss= 1000+1sss∈ S.
Selanjutnya untukx1 = 1,x2 = −1 dan setiapsss∈ Sdidapat
1sss+(−1)sss= (1+(−1))sss= 0sss= 000
(sss punya invers yaitu−sss).
CatatanPernyataanx1sss1+x2sss2 ∈ Suntuk setiapx1,x2 ∈ K dansss1,sss2 ∈ S, dapat diganti oleh
x1sss1+x2sss2+ . . .+xnsssn ∈ S
untuk setiapx1,x2, . . . ,xn ∈ K dansss1,sss2, . . . ,sssn ∈ S.
Contoh penggunaan sifat ruang bagian

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 89
1. Himpunan
B=
xyz
∈ R3
∣∣∣∣∣∣
x+y+z= 0
adalah ruang bagian dari ruang vektorR3 atasR. Sebab, untuk setiapvvv1,vvv2 ∈ B, maka
vvv1 =
x1
y1
z1
=
−y1−z1
y1
z1
= y1
−110
+z1
−101
,
vvv2 =
x2
y2
z2
=
−y2−z2
y2
z2
= y2
−110
+z2
−101
.
Sehingga untuka,b∈ R, didapat:
avvv1+bvvv2 = (ay1+by2)︸ ︷︷ ︸
∈R
−110
+(az1+bz2)︸ ︷︷ ︸
∈R
−101
∈ B.
2. Misalkan ruang vektor dari semua himpunan fungsi yaitu
V = { f : R→ R}danD⊂V, dengan
D =
{
f ∈V
∣∣∣∣
d2 fdx2 + f = 0
}
,
makaD adalah ruang bagian dari ruang vektorV atasR. Sebab, misalkanf ,g ∈ D dana,b∈ R, maka
d2(a f +bg)dx2 +(a f +bg) = a
d2 fdx2 +a f +b
d2gdx2 +bg
= a(d2 fdx2 + f )+b(
d2gdx2 +g) = a ·0+b ·0= 0.
Jadia f +bg∈ D.
3. HimpunanP3(R) adalah ruang bagian dari ruang vektorPn(R) atas lapanganR dengann≥ 3. Sebab, misalkanp(x),q(x) ∈ P3(R) dana,b∈ R, maka
ap(x)+bq(x) = a(a0+a1x+a2x2+a3x3)+b(b0+b1x+b2x2+b3x3)
= (aa0+bb0)︸ ︷︷ ︸
∈R
+(aa1+bb1)︸ ︷︷ ︸
∈R
x+(aa2+bb2)︸ ︷︷ ︸
∈R
x2
+(aa3+bb3)︸ ︷︷ ︸
∈R
x3.
Jadiap(x)+bq(x) ∈ P3(R).

90
5.4 Pembentang (Span)
MisalkanV suatu ruang vektor atasK danS⊂ V. Himpunan pembentang dariS adalah him-punan:
< S>def= {x1sss1+ . . .+xnsssn |x1, . . . ,xn ∈ K,sss1, . . . ,sssn ∈ S}.
Penulisanx1sss1+. . .+xnsssn juga dinamakankombinasi linier dari vektor-vektorsss1, . . . ,sssn. Berikutini diberikan sifat dari suatu< S> sebagaimana berikut.
Bila V merupakan suatu ruang vektor atasK danS⊂V denganS 6= /0, maka< S> adalah suaturuang bagian dariV.
Bukti
Misalkanvvv= x1sss1+ . . .+xnsssn
danwww= xn+1sssn+1+ . . .+xmsssm
di < S> dana,b∈ K, maka
avvv+bwww = a(x1sss1+ . . .+xnsssn)+b(xn+1sssn+1+ . . .+xmsssm)
= (ax1)sss1+ . . .+(axn)sssn+(bxn+1)sssn+1+ . . .+(bxm)sssm.
Terlihat bahwaavvv+bwww∈< S>, oleh karena itu< S> adalah ruang bagian dariV.
Contoh
1. MisalkanV ruang vektor atasK untuk setiapvvv∈V, maka〈{vvv}〉= {kvvv|k∈ K}.
2. Misalkan ruang vektorR3 atasR, maka〈{eee1,eee2}〉 = R2 dimanaeee1 = (1,0,0)′ daneee2 =
(0,1,0)′. Sebab,
R2 =
xy0
∣∣∣∣∣∣
x,y∈ R
=
x
100
+y
010
∣∣∣∣∣∣
x,y∈ R
= {xeee1+yeee2 |x,y∈ R}= 〈{eee1,eee2}〉 .
3. MisalkanV = Rn ruang vektor atasR dan diberikan suatu matriksA∈ Mn(R). Didefini-sikan suatu himpunan
S= {xxx∈V |Axxx= 000},

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 91
makaS adalah ruang bagian dariV. Sebab bila untuk sebarangzzz,yyy ∈ S dan sebaranga,b∈ R didapat
A(ayyy+bzzz) = a(Ayyy)+b(Azzz) = a ·000+b ·000= 000.
Jadiayyy+bzzz∈ S, maka dari ituSmerupakan sub ruang dariV.
Ruang bagian〈S〉 dari suatu ruang vektorV juga dinamakanruang vektor yang dibangun olehS. Berikut ini diberikan sifat dari suatu himpunan pembentang.
MisalkanV suatu ruang vektor atasK dan〈S〉 adalah suatu himpunan pembentang dariS danvvv∈V, maka
〈S〉= 〈S∪{vvv}〉bila dan hanya bilavvv∈ 〈S〉.
BuktiMisalkan〈S〉 = 〈S∪{vvv}〉, jelas bahwavvv ∈ 〈S∪{vvv}〉. Jadi jugavvv ∈ 〈S〉. Sebaliknya misalkanbahwavvv ∈ 〈S〉, akan ditunjukkan bahwa〈S〉 = 〈S∪{vvv}〉. Jelas bahwaS⊂ 〈S∪{vvv}〉. Tinggalmenunjukkan bahwa〈S∪{vvv}〉 ⊂ 〈S〉.Tulis
vvv= a0sss0+ . . .+ansssn
dan misalkanwww∈ 〈S∪{vvv}〉 .
Didapat
www = b0vvv+an+1sssn+1+ . . .+amsssm
= (b0a0)sss0+ . . .+(b0an)sssn+an+1sssn+1+ . . .+amsssm.
Terlihat bahwawww∈ 〈S〉. Jadi〈S∪{vvv}〉 ⊂ 〈S〉
dan karena〈S〉 ⊂ 〈S∪{vvv}〉 ,
oleh karena itu haruslah〈S〉= 〈S∪{vvv}〉 .
ContohMisalkan dalamR3, vektor-vektor
vvv1 =
100
,vvv2
010
danvvv3 =
230
.

92
Didapatvvv3 = 2vvv1+3vvv2, jadivvv3 ∈ 〈{vvv1,vvv2}〉. Maka dari itu
〈{vvv1,vvv2}〉= 〈{vvv1,vvv2,vvv3}〉 .
Hasil bentangan〈{vvv1,vvv2}〉 adalah bidang dalam ruangR3 yang diberikan oleh gambar berikut.
x
yz
vvv2
vvv1
v3v3v3 =2vvv1+
3vvv2
Bidang〈{vvv1,vvv2}〉
Sifat dari suatu himpunan pembentang (span) yang dibahas sebelumnya, menyatakan bahwasuatu vektorvvv di Sbisa dihapus untuk memperoleh himpunan baruSdengan himpunan pemben-tang yang sama yaitu
⟨S⟩= 〈S〉 bila dan hanya bilavvv adalah kombinasi linear dari vektor-vektor
di S. Jadi dengan pengertian ini, suatu himpuanS⊂ V adalah minimal bila dan hanyaS tidakmemuat vektor-vektor yang merupakan kombinasi linear darivektor-vektor yang lainnya dalamhimpunan tersebut (vektor-vektor diSyang demikian ini nantinya dinamakan bebas linear). De-ngan demikian bila hasil bentanganSdiinginkan lebih luas dari bentanganS, yaitu
〈S〉 ⊂ 〈S∪{vvv}〉=⟨S⟩,
maka haruslah dipilihvvv /∈ 〈S〉.Pereduksian banyaknya vektor-vektor bergantungan linieryang membangunW dapat dinya-
takan ulang oleh sifat berikut:
Misalkanv1v1v1, . . . ,vnvnvn adalah vektor di suatu ruang vektor atas suatu lapanganK dan misalkanW = 〈{v1v1v1, . . . ,vnvnvn}〉. Bila vektorvnvnvn adalah suatu kombinasi linier dariv1v1v1, . . . ,vn−1vn−1vn−1, maka
W = 〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉 .
BuktiBila diberikan sebarangvvv∈ 〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉, maka dapat dipilih skalark1, . . . ,kn−1 yang memenuhi
vvv= k1v1v1v1+ · · ·+kn−1vn−1vn−1vn−1
sehingga didapatvvv= k1v1v1v1+ · · ·+kn−1vn−1vn−1vn−1+0.vnvnvn.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 93
Terlihat bahwavvv∈ 〈{v1v1v1, . . . ,vnvnvn}〉. Jadi
〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉 ⊆ 〈{v1v1v1, . . . ,vnvnvn}〉 . (5.1)
Sebaliknya, bila diberikansebarangvvv∈ 〈{v1v1v1, . . . ,vnvnvn}〉, maka dapat dipilih skalara1, . . . ,an di Kyang memenuhi
vvv= a1v1v1v1+ · · ·+anvnvnvn.
Tetapi karenavnvnvn adalah suatu kombinasi linier dari vektor-vektorv1v1v1, . . . ,vn−1vn−1vn−1, maka dapat dipilihskalarb1, . . . ,bn−1 di K yang memenuhi
vnvnvn = b1v1v1v1+ · · ·+bn−1vn−1vn−1vn−1.
Sehingga didapat
vvv = a1v1v1v1+ · · ·+an−1vn−1vn−1vn−1+anvnvnvn
= a1v1v1v1+ · · ·+an−1vn−1vn−1vn−1+an(b1v1v1v1+ · · ·+bn−1vn−1vn−1vn−1)
= (a1+anb1)v1v1v1+ · · ·+(an−1+anbn−1)vn−1vn−1vn−1.
Terlihat bahwavvv∈ 〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉. Jadi
〈{v1v1v1, . . . ,vnvnvn}〉 ⊆ 〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉 . (5.2)
Dengan demikian dari (5.1) dan (5.2) didapat
W = 〈{v1v1v1, . . . ,vnvnvn}〉= 〈{v1v1v1, . . . ,vn−1vn−1vn−1}〉 .
5.5 Bebas Linear
Berikut ini diberikan suatu pengertian mengenai bebas linier. Vektor-vektorvvv1,vvv2, . . . ,vvvn di su-atu ruang vektorV atas lapanganK dikatakanbebas linierbila vektorvvvi , i = 1,2, . . . ,n bukanmerupakan suatu kombinasi linier dari vektor-vektor yang lainnya. Bila tidak demikian, makavektor-vektorvvv j , j = 1,2, . . . ,n dikatakanbergantungan linier.
Misalkan Vektor-vektorsss1, . . . ,sssn ∈ S⊂ V, denganV suatu ruang vektor atasK, vektor-vektorsssi , i = 1,2. . . ,n bebas linier bila dan hanya bilax1sss1+ . . .+xnsssn =000, xi ∈K dipenuhi hanya untukx1 = . . .= xn = 0.
BuktiMisalkansssi ∈ S, i = 1,2. . . ,n bebas linier dan andaikanx1sss1+ . . .+xnsssn = 000 tetapi untuk bebe-rapai, xi 6= 0. Didapat
sssi =
(
−x1
xi
)
sss1+ . . .+
(
−xi−1
xi
)
sssi−1+
(
−xi+1
xi
)
sssi+1+ . . .+
(
−xn
xi
)
sssn.

94
Terlihat bahwasssi merupakan kombinasi linier dari vektor-vektorsssj , j 6= i. Hal ini bertentangandengan kenyataan bahwasssi , i = 1,2, . . . ,n bebas linier. Jadi haruslah
x1sss1+ . . .+xnsssn = 0
dipenuhi hanya untukx1 = . . .= xn = 0. Selanjutnya misalkan
x1sss1+ . . .+xnsssn = 000, xi ∈ K
dipenuhi hanya untukx1 = . . .= xn = 0, maka jelas bahwa
sssi , i = 1,2. . . ,n
bebas linier. Bila tidak berarti bahwa untuk beberapai,
sssi = c1sss1+ . . .+ci−1sssi−1+ci+1sssi+1+ . . .+cnsssn
atau000= c1sss1+ . . .+ci−1sssi−1+cisssi +ci+1sssi+1+ . . .+cnsssn
denganci = −1. Ini bertentangan dengan kenyataan bahwa
000= c1sss1+ . . .+ci−1sssi−1+cisssi +ci+1sssi+1+ . . .+cnsssn
dipenuhi hanya unukci = 0, i = 1,2, . . . ,n.
Komentar:Pernyataan vektor-vektor
sssi , i = 1,2. . . ,n
dalam ruang vektorV atasK bebas linier ekivalen dengan
x1sss1+ . . .+xnsssn = 000, xi ∈ K
dipenuhi hanya untukx1 = . . .= xn = 0. Bila
V = Rn dan K = R,
maka vektor-vektorsssi, i = 1,2. . . ,n dalam ruang vektorRn atasR bebas linier mempunyai artibahwa sistem persamaan linier homogin
x1sss1+ . . .+xnsssn = 000
mempunyai penyelesaian trivial, yaituxi = 0, i = 1,2, . . . ,n. Bila persamaan homogin ini mem-punyai jawab non trivial, yaituxi 6= 0 untuk beberapai, maka hal ini berarti bahwa vektor-vektorsssi tsb. tidak bebas linier atau bergantungan linier. Bila vektor sss 6= 000 di ruang vektorRn danmemenuhi
sss= x1sss1+ . . .+xnsssn,

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 95
yaitu vektorsss merupakan kombinasi linier dari vektor-vektorsss1, . . . ,sssn. Hal ini berarti bahwasistem persamaan linier tak homogin
sss= x1sss1+ . . .+xnsssn,
mempunyai jawabxxx= (x1, . . . ,xn)′.
Contoh
1. DalamR4 vektor (1,4,−2,6)′ adalah kombinasi linier dari dua vektor(1,2,0,4)′ dan(1,1,1,3)′, sebab:
(1,4,−2,6)′ = 3(1,2,0,4)′−2(1,1,1,3)′.
Sedangkan vektor(2,6,0,9)′ bukan kombinasi linier(1,2,0,4) dan(1,1,1,3)′, sebab bila
(2,6,0,9)′ = x1(1,2,0,4)′+x2(1,1,1,3)
′
ekivalen dengan sistem persamaan linier
x1+x2 = 2
2x1+x2 = 6
x2 = 0
4x1+3x2 = 9
mudah diselidiki bahwa sistem persamaan linier ini tidak mempunyai jawab.
2. Misalkan ruang vektorV = { f :R→R} atasR, maka fungsi cos2x merupakan kombinasilinier dari fungsi-fungsi cos2x,sinh2x dan cosh2x, sebab
cos2x= 2cos2x+sinh2x−cosh2x,
ingat bahwacos2x= 2cos2x−1
dancosh2x−sinh2x= 1.
3. Misalkan tiga vektorvvv1 = (1,2,3)′,vvv2 = (3,2,1)′ danvvv3 = (3,3,3)′ di R3. Maka
〈{vvv1,vvv2,vvv3}〉 = {x1vvv1+x2vvv2+x3vvv3 |x1,x2,x3 ∈ R}= {(x1+3x2+3x3,2x1+2x2+3x3,3x1+x2+3x3)
′}
Tulis (x,y,z)′ = (x1+3x2+3x3,2x1+2x2+3x3,3x1+x2+3x3)′. Didapat:
xyz
=
1 3 32 2 33 1 3
x1
x2
x3
,

96
(1 −2 1)
xyz
= (1 −2 1)
1 3 32 2 33 1 3
x1
x2
x3
= 0,
ataux−2y+z= 0. Catatan 3vvv1+3vvv2−4vvv3 = 000 dan juga
det
1 3 32 2 33 1 3
= 0.
Terlihat bahwa vektor-vektorv1v1v1,v2v2v2,v3v3v3 bergantungan linear. Jadi persamaan homogin :
x1v1v1v1+x2v2v2v2+x3v3v3v3 = 000
atau dalam bentuk matriks :
1 3 32 2 33 1 3
x1
x2
x3
=
000
,
mempunyai jawab non-trivial. Salah satu jawabannya adalah:
x1 = 3,x2 = 3 dan x3 =−4.
Dengan demikian himpunanS= {v1v1v1,v2v2v2,v3v3v3}
bukan himpunan minimal.
4. Dua vektorvvv1 =(
40 15)′,vvv2 =
(−50 25
)′ ∈ R2 adalah bebas linear sebab
x1vvv1+x2vvv2 = 000
dipenuhi hanya untukx1 = x2 = 0, hal ini bisa diselidiki sbb:
40x1−50x2 = 015x1+25x2 = 0
}
−1540
B1+B240x1−50x2 = 0
1754 x2 = 0
}
⇒ x2 = 0,x1 = 0.
5. DiberikanS⊂ R3 dengan
S=
100
,
020
,
120
,
0−11
,
330
Perhatikan persamaan berikut:
x1
100
+x2
020
+x3
120
+x4
0−11
+x5
330
=
000
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 97
Himpunan penyelesaiannya adalah:
x1
x2
x3
x4
x5
= x3
−1−1100
+x5
−3−3/2
001
∣∣∣∣∣∣∣∣∣∣
x3,x5 ∈ R
Hal ini menunjukkan bahwa semua vektor diS saling bergantungan linier. Untukx3 =
0,x5 = 1, didapat bahwa vektor ke-5 dalamSmerupakan kombinasi linier dari dua vektorpertama. Gunakan sifat yang ada untuk menghapus vektor ke-5didapat:
S1 =
100
,
020
,
120
,
0−11
, jadi 〈S〉= 〈S1〉 .
Vektor ke-3 dalamS1 merupakan kombinasi linier dari dua vektor yang pertama, sehinggavektor ke-3 ini bisa dihapus dan didapat:
S2 =
100
,
020
,
0−11
.
Juga, dalam hal ini〈S1〉= 〈S2〉. Jadi〈S〉= 〈S2〉.6. Misalkan tiga vektorvvv1 = (1,1,0)′,vvv2 = (5,1,−3)′ danvvv3 = (2,7,4)′ di R3, maka
〈{vvv1,vvv2,vvv3}〉 = {x1vvv1+x2vvv2+x3vvv3 |x1,x2,x3 ∈ R}= {x1(1,1,0)
′+x2(5,1,−3)′+x3(2,7,4)′ |x1,x2,x3 ∈ R}
= {(x1+5x2+2x3,x1+x2+7x3,−3x2+4x3)′|x1,x2,x3∈R}.
Tulis (x,y,z)′ = (x1+5x2+2x3,x1+x2+7x3,−3x2+4x3)′, didapat:
xyz
=
1 5 21 1 70 −3 4
x1
x2
x3
.
Sehingga diperoleh:
−25 26 −334 −4 53 −3 4
xyz
=
−25 26 −334 −4 53 −3 4
1 5 21 1 70 −3 4
x1
x2
x3
=
1 0 00 1 00 0 1
x1
x2
x3
=
x1
x2
x3
.
Terlihat bahwa, untuk setiap(x,y,z)′ ∈ R3 selalu bisa diperolehx1,x2,x3 ∈ R sehingga
(x,y,z)′ = x1vvv1+x2vvv2+x3vvv3 ∈ 〈{vvv1,vvv2,vvv3}〉 .JadiR3⊂ 〈{vvv1,vvv2,vvv3}〉, dilain pihak〈{vvv1,vvv2,vvv3}〉 ⊂R3. Maka dari ituR3 = 〈{vvv1,vvv2,vvv3}〉 .

98
5.6 Basis dan Dimensi
MisalkanB= {bbb1,bbb2, . . .} ⊂V denganV adalah ruang vektor atasK. Bila 〈{bbb1,bbb2, . . .}〉=V danvektor-vektorbbb1,bbb2, . . . bebas liniermakaB dikatakan suatubasisdari V. Banyaknya anggotadari B dinamakandimensidari ruang vektorV.Contoh:
1. DalamR2, B1 = {(2,4)′,(1,1)′} adalah suatu basis dariR2, basis yang lainnya adalahB2 = {(1,0)′,(0,1)′}. Secara umumB3 = {(a11,a21)
′,(a12,a22)′} adalah suatu basis dari
R2 bila
det
(a11 a12
a21 a22
)
6= 0.
2. Diberikan ruang vektorV = {x1cosθ+x2sinθ | x1,x2 ∈ R} atasR, maka suatu basis dariV adalah
{cosθ,sinθ}.Sebab
x1cos(θ)+x2sin(θ) = 0
−x1sin(θ)+x2cos(θ) = 0
atau dalam bentuk persamaan matriks
(cos(θ) sin(θ)−sin(θ) cos(θ)
)(x1
x2
)
=
(00
)
.
Didapat(
x1
x2
)
=
(cos(θ) −sin(θ)sin(θ) cos(θ)
)(00
)
=
(00
)
.
Jadi cos(θ),sin(θ) adalah bebas linear dan juga
V = 〈{cos(θ),sin(θ)}〉 ,
maka{cos(θ),sin(θ)} adalah suatu basis dariV.
3. Dalam ruang vektorP3(x), maka{1,x,x2,x3} adalah suatu basis dariP3(x). Sedangkan{1,x,x2,x3,x4 . . .} adalah suatu basis dari ruang vektorP∞(x).
4. Dalam ruang vektorM2,2(R), yaitu himpunan matriks berukuran 2× 2 dengan elemen-elemen diR, maka
{(1 00 0
)
,
(0 10 0
)
,
(0 01 0
)
,
(0 00 1
)}

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 99
adalah suatu basis dariM2,2(R). Sebab bila
x1
(1 00 0
)
+x2
(0 10 0
)
+x3
(0 01 0
)
+x4
(0 00 1
)
=
(0 00 0
)
,
didapat(
x1 x2
x3 x4
)
=
(0 00 0
)
.
Terlihat bahwax1 = x2 = x3 = x4 = 0. Jadi(
1 00 0
)
,
(0 10 0
)
,
(0 01 0
)
,
(0 00 1
)
adalah bebas linear. Selanjutnya untuk sebarang(
a1,1 a1,2
a2,1 a2,2
)
∈M2,2(R)
didapat(
a1,1 a1,2
a2,1 a2,2
)
= a1,1
(1 00 0
)
+a1,2
(0 10 0
)
+a2,1
(0 01 0
)
+a2,2
(0 00 1
)
.
Terlihat bahwa(
a1,1 a1,2
a2,1 a2,2
)
∈⟨{(
1 00 0
)
,
(0 10 0
)
,
(0 01 0
)
,
(0 00 1
)}⟩
.
Jadi
M2,2(R) =
⟨{(1 00 0
)
,
(0 10 0
)
,
(0 01 0
)
,
(0 00 1
)}⟩
.
Berikut ini diberikan beberapa sifat dari suatu basis.
DiberikanB = {v1v1v1, . . . ,vnvnvn} adalah suatu basis dari suatu ruang vektorV atas suatu lapanganKdank adalah suatu skalar taknol diK. Maka
Bk = {kv1v1v1,v2v2v2, . . . ,vnvnvn}
adalah suatu basis dariV.
BuktiBila vvv sebarang vektor diV, maka karenaB adalah suatu basis dariV dengan demikian dapatdipilih skalark1, . . . ,kn di K yang memenuhi
vvv= k1v1v1v1+k2v2v2v2+ · · ·+knvnvnvn.

100
Tetapi karenak 6= 0, maka didapat
vvv=k1
k(kv1v1v1)+k2v2v2v2+ · · ·+knvnvnvn.
Terlihat bahwa sebarang vektorvvv di V adalah suatu kombinasi linier dari vektor-vektor diBk.Jadi〈Bk〉=V. Selanjutnya, untuk menunjukkan bahwaBk adalah bebas linier, tinjau persamaan
a1(kv1v1v1)+a2v2v2v2+ · · ·+anvnvnvn = 000.
Persamaan tersebut dapat ditulis ulang sebagai
(a1k)v1v1v1+a2v2v2v2+ · · ·+anvnvnvn = 000.
KarenaB adalah bebas linier, maka haruslah
a1k= 0, a2 = 0, . . . ,an = 0.
Karenak 6= 0, makaa1 = 0. Dengan demikianBk adalah bebas linier, jadiBk adalah suatu basisdariV.
Contoh.MisalkanW adalah ruang bagian dariM2×2(R) yang merupakan himpunan matriks-matriks den-gan trace sama dengan nol. Selanjutnya bila
S=
{[1 00 −1
]
,
[0 10 0
]
,
[0 01 0
]}
,
maka tunjukkan bahwaS adalah suatu basis dariW. Pertama ditunjukkan bahwa〈S〉 = W.Diberikan sebarang matriks
A=
[a bc d
]
mempunyai trace sama dengan nol bila dan hanya bilaa+d = 0, jadi
A=
[a bc −a
]
Sehingga didapat
A=
[a bc −a
]
= a
[1 00 −1
]
+b
[0 10 0
]
+c
[0 01 0
]
.
Terlihat bahwa sebarang matriksA di W adalah kombinasi linier dari matriks-matriks diS. Jadi〈S〉 = W. Selanjutnya ditunjukkan bahwaS adalah bebas linier sebagai berikut. Tinjau sistempersamaan linier berikut
k1
[1 00 −1
]
+k2
[0 10 0
]
+k3
[0 01 0
]
=
[0 00 0
]
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 101
Persamaan tersebut ekivalen dengan[0 00 0
]
=
[k1 k2
k2 −k1
]
.
Hal ini memberikan penyelesaian trivialk1 = k2 = k3 = 0. JadiS adalah bebas linier. Karena〈S〉=W dan vektor-vektor diSadalah bebas linier, makaSadalah suatu basis dariW.
Sifat MisalkanV suatu ruang vektor atasK dan{vvv1, . . . ,vvvn} adalah suatu basis dariV, makasebarang elemenvvv∈V dapat diungkapkan secara tunggal sebagai kombinasi linier:
vvv= x1vvv1+ . . .+xnvvvn, dimana x1, . . . ,xn ∈ K.
BuktiMisalkan vektorvvv dapat diungkapkan sebagai dua kombinasi linier
vvv= a1vvv1+ . . .+anvvvn
danvvv= x1vvv1+ . . .+xnvvvn,
didapat:(x1−a1)vvv1+ . . .+(xn−an)vvvn = 000,
karena vektor-vektorvvv1, . . . ,vvvn bebas linier, maka haruslahx1− a1 = 0, . . . ,xn− an = 0. Den-gan demikian didapatx1 = a1, . . . ,xn = an. Jadi pengungkapan sebarang vektorvvv di V sebagaikombinasi linier
vvv= x1vvv1+ . . .+xnvvvn, dimana x1, . . . ,xn ∈ K
adalah tunggal.
Komentar:Pernyataan
vvv= x1v1v1v1+x2v2v2v2+ · · ·+xnvnvnvn,
dapat ditulis secara tunggal mempunyai arti yang ekivalen dengan sistem persamaan linear tak-homogin
vvv= x1v1v1v1+x2v2v2v2+ · · ·+xnvnvnvn
mempunyai jawab tunggal. Misalnya, pada contoh sebelumnyayaitu dalamR2,
B= {(2,4)′,(1,1)′}
adalah suatu basis dariR2. Misalkan diberikan sebarangvvv = (a,b)′ ∈ R2,vvv 6= 0, maka dengan
basisB, vektorvvv dapat ditulis sebagai kombinasi linear
vvv= x1(2,4)′+x2(1,1)
′

102
atau dalam bentuk sistem persamaan linear tak-homogin(
ab
)
= x1
(24
)
+x2
(11
)
dan dalam bentuk matriks (ab
)
=
(2 14 1
)(x1
x2
)
.
Didapat(
x1
x2
)
=
(−1
212
2 −1
)(ab
)
=
(−a
2 +b2
2a−b
)
.
Nilai x1 = −a2 +
b2 danx2 = 2a− b adalah tunggal. Jadi, untuk sebarangvvv = (a,b)
′ 6= 0 adadengan tunggalx1 = −a
2 +b2 danx2 = 2a−b yang memenuhi
vvv= x1(2,4)′+x2(1,1)
′.
Berikut ini, diberikan suatu sifat untuk ruang vektorRn atasR, yaitu misalkan
vvvi ∈ Rn, i = 1,2, . . . ,m.
Bila m> n, maka vektor-vektorvvvi , i = 1,2, . . . ,m bergantungan linier.
Bukti Untuk setiap j = 1,2, . . . ,m, tulis vektorvvv j = (a1 j ,a2 j , . . . ,an j)′, sehingga persamaan
x1vvv1+ . . .+xmvvvm = 000 dalam bentuk matriks adalah:
a11 . . . a1m...
...an1 . . . anm
x1...
xm
=
0...0
.
Terlihat bahwa, persamaan homogin terdiri darin persamaan dengan variabel yang takdiketahuisebanyakm. Karenam> n, maka persamaan mempunyai suatu solusi yangnontrivial, yaituada beberapaxk, k = 1,2, . . . ,m yang tidak semuanya sama dengan nol. Jadivvv j , j = 1,2, . . . ,mbergantungan linier.
ContohDalam ruang vektorR2 atasR, Misalkanvvv1 = (a11,a21)
′,vvv2 = (a12,a22)′ ∈ R2. Bila vektor-
vektorvvv1,vvv2, bebas linier, maka persamaan:x1vvv1+x2vvv2 = 000 atau dalam bentuk matriks:Axxx= 000dengan
A=
(a11 a12
a21 a22
)
, xxx=
(x1
x2
)
dan 000=
(00
)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 103
mempunyai jawab trivial hanya bila det(A) 6= 0. Secara geometris, hal ini menyatakan bahwaluas daerah jajaran genjang yang dibentuk oleh dua vektorvvv1 danvvv2 sama dengan|det(A)|.Sebaliknya bila det(A) = 0, maka luas daerah ini sama dengan 0. Hal ini menunjukkan bahwadua vektorvvv1 danvvv2 terletak pada satu garis yang sama atau dengan kata lain dua vektorvvv1 danvvv2
bergantungan linier. Jadi{vvv1,vvv2} adalah suatu basis dariR2 dengan dimensi 2. Hal ini dijelaskandalam gambar berikut.
x
y
v1v1v1
v2v2v2
000 000 x
yv1v1v1
v2v2v2
Sifat. MisalkanV suatu ruang vektor atasK dan{vvv1, . . . ,vvvn} suatu basis dariV. Bila vektor-vektoruuu1, . . . ,uuum denganm> n, maka vektor-vektoruuu1, . . . ,uuum bergantungan linier.
BuktiKarena{vvv1, . . . ,vvvn} suatu basis dariV, didapat:
uuu1 = a11vvv1+ . . .+an1vvvn...
uuum = a1mvvv1+ . . .+anmvvvn,
denganai j ∈ K, i = 1,2, . . . ,n dan j = 1,2, . . . ,m. Vektor-vektor{vvv1, . . . ,vvvn} bebas linier, untukx1, . . . ,xm∈ K didapat:
000 = x1uuu1+ . . .+xmuuum
= x1(a11vvv1+ . . .+an1vvvn)+ . . .+xm(a1mvvv1+ . . .+anmvvvn)
= (a11x1+ . . .+a1mxm)vvv1+ . . .+(an1x1+ . . .+anmxm)vvvn
dan haruslaha11x1+ . . .+a1mxm = 0, . . . ,an1x1+ . . .+anmxm = 0 atau dengan notasi matriks:
a11 . . . a1m...
...an1 . . . anm
x1...
xm
=
0...0
.
Persamaan homogin diatas mempunyai jawab non-trivial (sebab m > n). Jadi vektor-vektoruuu1, . . . ,uuum bergantungan linier.
�
KesimpulanMisalkanV suatu ruang vektor atasK dengan dimensi hingga. Maka setiap duabasis yang berbeda dariV harus mempunyai banyak elemen yang sama.

104
�
Contoh
1. Dalam ruang vektorP3(R) atasR, B = {1,x,x2,x3} adalah suatu basis baku dariP3(R).Basis yang lainnya adalahB2 = {1,1+x,1+x+x2,1+x+x2+x3}.
2. Persamaan homoginAxxx= 000, diberikan oleh :
1 3 −5 1 51 4 −7 3 −21 5 −9 5 −90 3 −6 2 −1
x1
x2
x3
x4
x5
=
0000
.
Himpunan penyelesaiannya adalah:
〈{v1,vvv2v1,vvv2v1,vvv2}〉=
xxx= a
1−2−100
+b
130−5−1
∣∣∣∣∣∣∣∣∣∣
a,b∈ R
merupakan suatu ruang vektor atasR dengan dimensi dua.
SifatMisalkanV suatu ruang vektor atasK berdimensi hingga. Maka setiap himpunan hinggaS⊂Vyang terdiri dari vektor-vektor bebas linier diV tetapiS bukan merupakan suatu basis dariVdapat diperluas sampai merupakan suatu basis dariV.
Bukti. MisalkanS= {vvv1, . . . ,vvvm} denganvvvi, i = 1, . . . ,m adalah vektor-vektor yang bebas linier.Karena〈S〉 6=V, maka pilih vektorvvvm+1 ∈V sehinggavvvm+1 bukan kombinasi linier dari vektor-vektorvvv j , j = 1,2, . . . ,m. Selanjutnya namakanT = {vvv1, . . . ,vvvm,vvvm+1}, bila 〈T〉 = V, makaTadalah basis dan sudah tidak bisa lagi diperluas menjadi vektor-vektor yang bebas linier. Bila〈T〉 6= V, lakukan lagi cara perluasan seperti sebelumnya sehingga diperoleh himpunan vektor-vektor yang bebas linier diU yang memenuhi〈U〉=V.
�
Kesimpulan. MisalkanV ruang vektor atasK berdimensin, maka setiap himpunan darin vektoryang bebas linier adalah suatu basis dariV.
�

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 105
ContohMisalkan
S= {(1,1,1)′,(0,−1,0)′} ⊂ R3,
jelas bahwa vektor-vektor diSbebas linier dan
〈S〉= {x(1,1,1)′+y(0,−1,0)′ = (x,x−y,x)′ |x,y∈ R},
jelas bahwa bila(x1,x2,x3)
′ ∈ 〈S〉 ,
makax3 = x1. Oleh karena itu(x,y,z)′ /∈ 〈S〉 bila x 6= z. Pilih vektor (1,0,0) sehingga dida-
patT = {(1,1,1)′,(0,−1,0)′,(1,0,0)′} dimana vektor-vektor diT bebas linier, maka dari ituT
merupakan suatu basis dariR3.
Jumlahan Langsung.MisalkanU danV adalah ruang bagian dari suatu ruang vektorW atasK dengandimensi hingga, maka dim(U +V) = dim(U)+dim(V)−dim(U ∩V), dimanaU +V = {uuu+vvv |uuu∈U,vvv∈V}.
Bukti. Misalkan{zzz1, . . . ,zzzr} suatu basis dariU ∩V perluas basis ini masing-masing menjadi
{zzz1, . . . ,zzzr ,uuu1, . . . ,uuum}adalah suatu basis dariU dan
{zzz1, . . . ,zzzr ,vvv1, . . . ,vvvn}
suatu basis dariV. Terlihat bahwa,
dim(U ∩V) = r,dim(U) = r +m dan dim(V) = r +n.
Selanjutnya, ditunjukkan bahwa
{zzz1, . . . ,zzzr ,uuu1, . . . ,uuum,vvv1, . . . ,vvvn}
adalah suatu basis dariU +V. Sehingga, dalam hal ini didapat
dim(U +V) = r +m+n= (r +m)+(r +n)− r
= dim(U)+dim(V)−dim(U ∩V).

106
Misalkan sebarangwww∈U +V, makawww= uuu+vvv untuk beberapauuu∈U dan bebe-rapavvv∈V. Dengan kenyataan bahwa
uuu= a1zzz1+ . . .+arzzzr +b1uuu1+ . . .+bmuuum
untuk beberapa skalarai,b j dan
vvv= c1zzz1+ . . .+crzzzr +d1vvv1+ . . .+dmvvvn
untuk beberapa skalarck,dl , didapat:
www = uuu+vvv
= (a1+c1)zzz1+ . . .+(ar +cr)zzzr +b1uuu1+ . . .+bmuuum+d1vvv1+ . . .+dmvvvn
terlihat bahwawww∈ 〈{zzz1, . . . ,zzzr ,uuu1, . . . ,uuum,vvv1, . . . ,vvvn}〉 .
Maka dari itu didapat
〈{zzz1, . . . ,zzzr ,uuu1, . . . ,uuum,vvv1, . . . ,vvvn}〉=U +V.
Diberikan
x1zzz1+ . . .+xrzzzr +xr+1uuu1+ . . .+xr+muuum+xr+m+1vvv1+ . . .+xr+m+nvvvn = 000
untuk beberapa skalarx j . Tulis
www= x1zzz1+ . . .+xrzzzr +xr+1uuu1+ . . .+xr+muuum,
didapatwww=−xr+m+1vvv1+ . . .−xr+m+nvvvn.
Terlihat bahwawww∈U danwww∈V, jadiwww∈U∩V. Tetapi{zzz1, . . . ,zzzr} adalah suatubasis dariU ∩V, jadi
www= b1zzz1+ . . .+brzzzr
untuk beberapa skalarbi. Sehingga didapat
b1zzz1+ . . .+brzzzr =−xr+m+1vvv1+ . . .−xr+m+nvvvn
ataub1zzz1+ . . .+brzzzr +xr+m+1vvv1+ . . .+xr+m+nvvvn = 000.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 107
Tetapi{zzz1, . . . ,zzzr ,vvv1, . . . ,vvvn}
adalah suatu basis dariV, maka dari itu haruslah
b1 = . . .= br = xr+m+1 = . . .= xr+m+n = 0,
sehingga persamaan
x1zzz1+ . . .+xrzzzr +xr+1uuu1+ . . .+xr+muuum+xr+m+1vvv1+ . . .+xr+m+nvvvn = 000
menjadix1zzz1+ . . .+xrzzzr +xr+1uuu1+ . . .+xr+muuum= 000.
Tetapi{zzz1, . . . ,zzzr ,uuu1, . . . ,uuum}
juga adalah suatu basis dariU . Jadi haruslah
x1 = . . . = xr = xr+1 = . . . = xr+m= 0.
Sehingga didapatxk = 0, k= 1,2, . . . , r +m+n.
Jadi vektor-vektorzzz1, . . . ,zzzr ,uuu1, . . . ,uuum,vvv1, . . . ,vvvn
bebas linier.
�
ContohMisalkan
W = R4,uuu1 = (1,1,0,0)′,uuu2 = (−3,7,2,1)′,U = 〈{uuu1,uuu2}〉
danV = {(x1,x2,x3,0)
′ |xi ∈ R}.Vektor-vektor
uuu1,uuu2

108
bebas linier, sebab bilaa1uuu1+a2uuu2 = 000
ataua1(1,1,0,0)
′+a2(−3,7,2,1)′ = 000
didapata1 = a2 = 0. Jadi dim(U) = 2. Suatu basis dariV adalah
eee1 = (1,0,0,0)′,eee2 = (0,1,0,0)′,eee3 = (0,0,1,0)′.
Jadi dim(V) = 3. Perhatikan bahwa
eee4 = (0,0,0,1)′ = (−3,7,2,1)′+3(1,0,0,0)′−7(0,1,0,0)′−2(0,0,1,0)′
= uuu2+3eee1−7eee2−2eee3.
Jadieee4 ∈U +V. Karenaeee1,eee2,eee3
juga diU +V, maka{eee1,eee2,eee3,eee4}
adalah suatu basis dariU +V. Jadi dim(U +V) = 4. Sehingga didapat:
dim(U ∩V) = dim(U)+dim(V)−dim(U +V) = 2+3−4= 1.
Bisa diselidiki secara langsung bahwa vektor-vektor diU ∩V adalah vektor-vektor diU dengan komponen ke-empat sama dengan nol, yaitu vektor
b1uuu1+b2uuu2 = (b1−3b2,b1+7b2,2b2,b2)′
denganb2 = 0. JadiU ∩V = 〈{uuu1}〉 .
Terlihat bahwa dim(U ∩V) = 1.
Catatan. Bila U,V ruang bagian berdimensi hingga masing-masing dengan ba-sis {uuu1, . . . ,uuum} dan{vvv1, . . . ,vvvn}. MisalkanW = U +V dan sebarangwww ∈W.Didapat
www= uuu+vvv= a1uuu1+ . . .+amuuum+b1vvv1+ . . .+bnvvvn
atauW = 〈{uuu1, . . . ,uuum,vvv1, . . . ,vvvn}〉 .

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 109
Selanjutnya reduksi vektor-vektor
uuu1, . . . ,uuum,vvv1, . . . ,vvvn
menjadi vektor-vektor yang bebas linier (sampai minimal) dan himpun kedalamhimpunanS, sehingga didapatW = 〈{S}〉. Jadi dimensi dariW sama denganbanyaknya vektor-vektor diS.
Bila U danV adalah ruang bagian berdimensi hingga denganU ∩V = {000}, makaU +V dinamakanjumlahan langsungdariU danV.
Contoh.Himpunan
U = {(x1,x2,0)′ |x1,x2 ∈ R}
danV = {(0,0,x3)
′ |x3 ∈ R}adalah ruang bagian dari ruang vektorR3 atasR denganU∩V = {000}. JadiU +Vadalah jumlahan langsung dariU danV, sedangkan
U +V = {(x1,x2,0)′+(0,0,x3)
′ = (x1,x2,x3)′ |x1,x2,x3 ∈ R}
= {x1(1,0,0)′+x2(0,1,0)
′+x3(0,0,1)′ |x1,x2,x3 ∈ R} =R3,
terlihat bahwa dim(U +V) = 3. Perhatikan bahwa
U = {(x1,x2,0)′ |x1,x2 ∈ R}
= {x1(1,0,0)′+x2(0,1,0)
′ |x1,x2 ∈ R}=⟨{(1,0,0)′,(0,1,0)′}
⟩,
terlihat bahwa dim(U) = 2. Juga,
V = {(0,0,x3)′ |x3 ∈ R}
= {x3(0,0,1)′ |x3 ∈ R}
=⟨{(0,0,1)′}
⟩
dan dim(V) = 1. MaknaU +V merupakan jumlahan langsung dariU danVtampak dari dimensi, yaitu
dim(U+V)=dim(U)+dim(V)−dim(U∩V)=2+1−0=3=dim(U)+dim(V)
110
Hal ini juga bisa dilihat dari pengertian basis yaitu, himpunan{(1,0,0)′,(0,1,0)′}adalah suatu basis dariU dan himpunan{(0,0,1)′} adalah suatu basis dariVsedangkan himpunan{(1,0,0)′,(0,1,0)′,(0,0,1)′} sudah bebas linier (tidak bisalagi direduksi lagi sehingga bebas linier). Jadi, dari sinijuga langsung didapatbahwa dim(U +V) = dim(U)+dim(V).
Kesimpulan. Dimensi dari suatu ruang jumlahan langsung sama dengan jumlahdari masing-masing dimensi ruang.
�
Berikut ini diberikan suatu sifat yang lain dari ruang jumlahan langsung. Setiapwww∈W=U+V denganU∩V = {000}mempunyai penulisan tunggalwww=uuu+vvv,uuu∈U,vvv∈V.
BuktiMisalkan
www= uuu+vvv= uuu+ vvv,
makauuu− uuu= vvv− vvv.
Tetapiuuu− uuu∈U,
vvv− vvv∈V
danU ∩V = {000}. Maka haruslah
uuu− uuu= 000
danvvv− vvv= 000
atauuuu= uuu
danvvv= vvv.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 111
Koordinat . Misalkan{vvv1, . . . ,vvvn}
adalah suatu basis dari suatu ruang vektor atasK. Jadi setiapvvv∈V dapat ditulissecara tunggal oleh
vvv= x1vvv1+ . . .+xnvvvn
untuk beberapa skalarx1, . . . ,xn ∈ K. Dalam hal ini skalar-skalarx1, . . . ,xn dina-makankoordinatdari vektorvvv relatif terhadap basis{vvv1, . . . ,vvvn}.
Contoh.MisalkanV =R3 dengan basis baku{eee1= (1,0,0)′,eee2= (0,1,0)′,eee3= (0,0,1)′}dan misalkan sebarangvvv= (x,y,z)′ ∈V, makavvv= xeee1+yeee2+zeee3. Jadi koordi-nat darivvv relatif terhadap basis{eee1,eee2,eee3} adalah skalarx,y danz. Tetapi untukbasis yang lain dariV, misalkan
{vvv1 = (0,1,1)′,vvv2 = (1,0,1)′,vvv3 = (1,1,0)′},
maka
vvv=
(−x+y+z
2
)
vvv1+
(x−y+z
2
)
vvv2+
(x+y−z
2
)
vvv3.
Koordinat dari vektorvvv relatif terhadap basis
{vvv1,vvv2,vvv3}
adalah skalar−x+y+z
2,
x−y+z2
danx+y−z
2.
Terlihat bahwa vektorvvv terhadap dua basis yang berbeda dari ruang vektorVmempunyai dua koordinat yang berbeda pula.
Basis terurut.Adalah perlu dijamin bahwa suatu vektor dikaitkan dengan suatu vektor basisyang sesuai, cara baku untuk melakukan hal ini adalah menggunakan penyajianterurut untuk koordinat dan vektor basis. Bila urutan dari vektor-vektor dalamsuatu basis dipersoalkan dalam hal ini dinamakanbasis terurutdan basis ini
112
ditulis sebagai suatubarisan. Bila urutan dari vektor basis takdipersoalkan, ba-sis tersebut ditulis sebagai suatu himpunan, dalam hal ini penekanan mengenaidiskusi dari suatu vektor basis, urutan tidak bergantung pada urutan. Tetapi, bilakoordinat dari suatu vektor disajikan sebagai baris atau kolom dalam suatu ma-triks, maka secara esensi penyajian bergantung pada urutanvektor-vektor basis.Begitu juga, bila suatu pemetaan linier disajikan sebagai suatu matriks, makasangatlah penting menggunakan vektor basis terurut. Dikaji ulang penulisan ko-ordinat dari suatu vektor relatif terhadap basis terurut. Diberikan basis teru-rut B = v1v1v1,v2v2v2, . . . ,vnvnvn dari suatu ruang vektorV atas suatu lapanganK. Misal-kan sebarang vektorvvv di V, maka dapat dipilih dengan tunggal skalar-skalark1,k2, . . . ,kn di K yang memenuhi
vvv= k1v1v1v1+k2v2v2v2+ · · ·+knvnvnvn.
Dalam hal ini skalar-skalark1,k2, . . . ,kn dinamakankoordinat darivvv relatif ter-hadap basis terurutB dan ditulis
[vvv]B =
k1
k2...
kn
∈ Kn
sebagai vektor koordinat darivvv relatif terhadap basis terurutB.
Contoh 1MisalkanV = R2 danB adalah basis terurut
B=
[11
]
,
[−11
]
.
Dapatkan koordinat dari vektorvvv=
[15
]
relatif terhadap basisB. Penyelesaian-
nya sebagai berikut. Koordinatk1 dank2 didapat melalui menuliskanvvv sebagaikombinasi linier dari vektor-vektor diB, yaitu menyelesaikan sistem persamaanlinier takhomogin
k1
[11
]
+k2
[−11
]
=
[15
]
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 113
Penyelesaiannya adalahk1 = 3 dank2 = 2. Dengan demikian didapat vektorkoordinat darivvv relatif terhadap basisB adalah
[vvv]B =
[32
]
.
Contoh 2MisalkanV = P2(R) = {a0+a1x+a2x2 |a0,a1,a2∈R} danB adalah basis teru-rut
B= 1,x−1,(x−1)2.
Dapatkan koordinatvvv= p(x)= 2x2−2x+1 relatif terhadap basisB. Persoalan inidijawab sebagai berikut. Kita harus mendapatkank1,k2 dank3 yang memenuhi
k1(1)+k2(x−1)+k3(x−1)2 = 2x2−2x+1.
Dengan melakukan penghitungan bagian kiri persamaan didapat
k3x2+(k2−2k3)x+(k1−k2+k3) = 2x2−2x+1.
Dengan menyamakan koefisien kedua ruas persamaan didapat sistem persamaanlinier
k1−k2+k3 = 1k2−2k3 = −2
k3 = 2
Didapat penyelesaian tunggalk1 = 1,k2 = 2 dank3 = 2, jadi
[vvv]B =
122
Contoh 3Diberikan ruang bagianW himpunan dari semua matriks simetri dalam ruangvektorM2×2(R). MisalkanB adalah vektor-vektor terurut
B=
[1 00 0
]
,
[0 11 0
]
,
[0 00 1
]
.

114
Tunjukkan bahwaB adalah suatu basis untukW dan dapatkan koordinat dari
vvv=
[2 33 5
]
relatif terhadap basisB. Untuk menjawab persoalan ini pertama ditunjukkanbahwaB membangunW. Sebarang matriks simetriA di W adalah
A=
[a bb c
]
,
didapat
a
[1 00 0
]
+b
[0 11 0
]
+c
[0 00 1
]
=
[a bb c
]
= A
Terlihat bahwa sebarangA di W juga di 〈B〉. Jadi〈B〉 = W. Selanjutnya di-tunjukkan bahwaB adalah bebas linier diW sebagai berikut. Tinjau persamaanhomogin berikut
k1
[1 00 0
]
+k2
[0 11 0
]
+k3
[0 00 1
]
=
[0 00 0
]
.
didapat[k1 k2
k2 k3
]
=
[0 00 0
]
.
Dari persamaan terakhir didapatk1 = k2 = k3 = 0. JadiB adalah bebas linier.Dengan demikianB adalah basis terurut diW. Perhatikan matriksvvv terhadapbasis terurutB dapat ditulis sebagai kombinasi linier:
vvv=
[2 33 5
]
= 2
[1 00 0
]
+3
[0 11 0
]
+5
[0 00 1
]
.
Jadi vektor koordinat darivvv relatif terhadapB adalah
[vvv]B =
235
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 115
5.7 Perubahan Basis
Banyak masalah dalam matematika terapan menjadi lebih mudah melalui pe-rubahan suatu basis dari suatu ruang vektor ke basis yang lainnya. Sebagai ilus-trasi yang sederhana ditinjau suatu ruang vektorV berdimensi dua atas suatuskalarK. Diberikan ruang vektorV berdimensi dua atas suatu lapanganK danmisalkan
B= v1v1v1,v2v2v2 dan B′ = u1u1u1,u2u2u2
adalah dua basis terurut dariV. Misalkan sebarang vektorvvv di V terhadap basisB vektor koordinatnya adalah
[vvv]B =
[x1
x2
]
yaitu vvv= x1v1v1v1+x2v2v2v2.
Untuk menentukan vektor koordinat darivvv relatif terhadap basisB′. Tulisv1v1v1 danv2v2v2 dalam suku-sukuu1u1u1 danu2u2u2. KarenaB′ adalah suatu basis dariV, maka dapatdiplih skalara1,a2,b1 danb2 di K yang memenuhi
v1v1v1 = a1u1u1u1+a2u2u2u2
v2v2v2 = b1u1u1u1+b2u2u2u2.
Makavvv dapat ditulis sebagai
vvv= x1(a1u1u1u1+a2u2u2u2)+x2(b1u1u1u1+b2u2u2u2).
Kumpulkan koefisien dariu1u1u1 danu2u2u2 didapat
vvv= (x1a1+x2b1)u1u1u1+(x1a2+x2b2)u2u2u2.
Jadi vektor koordinat darivvv relatif terhadap basisB′ adalah
[vvv]B′ =
[x1a1+x2b1
x1a2+x2b2
]
.
Dengan menulis ulang bagian kanan sebagai perkalian matriks didapat
[vvv]B′ =
[a1 b1
a2 b2
][x1
x2
]
=
[a1 b1
a2 b2
]
[vvv]B.

116
Perhatikan bahwa kolom dari matriks[a1 b1
a2 b2
]
adalah vektor[v1v1v1]B dan [v2v2v2]B. Dalam hal yang demikian matriks tersebut dina-makanmatriks transisidariB keB′ dan dinotasikan oleh[I ]B
′B . Jadi
[vvv]B′ = [I ]B′
B [vvv]B.
Contoh 1DiberikanV = R2 dengan basis terurut
B=
[11
]
,
[1−1
]
dan B′ =[
2−1
]
,
[−11
]
.
a. Dapatkan matriks transsisi dariB keB′.
b. Misalkan[vvv]B =
[3−2
]
, maka dapatkan[vvv]B′.
Jawab
a. Dinotasikan vektor diB denganv1v1v1,v2v2v2 dan diB′ denganu1u1u1,u2u2u2. Maka vektorkolom matriks transisi adalah[v1v1v1]B dan[v2v2v2]B. Koordinat dari vektor tersebutdidapat dari menyelesaikan persamaan
c1
[2−1
]
+c2
[−11
]
=
[11
]
dan d1
[2−1
]
+d2
[−11
]
=
[1−1
]
,
yaitu c1 = 2,c2 = 3 dand1 = 0,d2 =−1. Jadi matriks transisi adalah
[I ]B′
B =
[2 03 −1
]
.
b. Karena[vvv]B′ = [I ]B
′B [vvv]B,
maka
[vvv]B′ =
[2 03 −1
][3−2
]
=
[611
]
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 117
Perhatikan bahwa vektor yang sama relatif terhadap basis yang berbedaadalah diperoleh dari vektor koordinat[vvv]B dan[vvv]B′. Yaitu
3
[11
]
−2
[1−1
]
=
[15
]
= 6
[2−1
]
+11
[−11
]
.
Prosedur untuk mendapatkan matriks transisi diantara dua basis dari suatu ruangvektorV berdimensi dua atas suatu skalarK dapat digeneralisasi ke ruang vektorRn atasR. Hal ini dinyatakan sebagai berikut.
MisalkanV adalah suatu ruang vektor berdimensin atas suatu lapanganK de-ngan basis terurut
B= v1v1v1,v2v2v2, . . . ,vnvnvn dan B′ = u1u1u1,u2u2u2, . . . ,ununun.
Maka matriks transisi dariB keB′ diberikan oleh
[I ]B′
B =
v1v1v1
B′
v2v2v2
B′
· · ·
vnvnvn
B′
.
Lagipula, vektor perubahan koordinat diberikan oleh
[vvv]B′ = [I ]B′
B [vvv]B.
Contoh 2Misalkan ruang vektorV = P2(x) dengan basis terurut
B= 1,x,x2 dan B′ = 1,1+x,1+x+x2.
a. Dapatkan matriks transisi[i]B′
B .b. Misalkanp(x) = 3−x+2x2 ∈ P2(x), maka dapatkan[p(x)]B′.
Jawab
a. Untuk memperoleh vektor kolom yang pertama dari matriks transisi harusdipilih skalara1,a2 dana3 yang memenuhi
a1(1)+a2(1+x)+a3(1+x+x2) = 1,

118
didapata1 = 1,a2 = 0 dana3 = 0. Jadi
[1]B′ =
100
.
Vektor kolom kedua dan ketiga dari matriks transisi masing-masing diper-oleh dengan menyelesaikan persamaan
b1(1)+b2(1+x)+b3(1+x+x2) = x
danc1(1)+c2(1+x)+c3(1+x+x2) = x2.
Penyelesaiannya diberikan olehb1 = −1,b2 = 1,b3 = 0 danc1 = 0,c2 −
1,c3 = 1. Jadi matriks transisi adalah
[I ]B′
B =
1 −1 00 1 −10 0 1
.
b. BasisB adalah basis terurut baku, maka vektor koordinat darip(x) = 3−x+2x2 relatif terhadapB adalah
[p(x)]B =
3−12
.
Jadi
[p(x)]B′ =
1 −1 00 1 −10 0 1
3−12
=
4−32
.
Perhatikan bahwa 3−x+2x2 = 4(1)−3(1+x)+2(1+x+x2).
Contoh 3Diberikan basis baku terurutB=e1e1e1,e2e2e2 untuk ruang vektorR2 atasR, sedangkanbasis terurutB′ diberikan oleh
B′ = u1u1u1,u2u2u2 =
[−11
]
,
[11
]

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 119
dan misalkanvvv=
[34
]
.
a. Dapatkan matriks transisi dariB keB′.b. Dapatkan[vvv]B′.c. Tulis vektorvvv sebagai kombinasi linier darie1e1e1 dane2e2e2 dan juga sebagai kom-binasi linier dariu1u1u1 danu2u2u2.d. Tunjukkan hasil dari bagian (c) secara grafik.
Jawab
a. Matriks transisi dariB keB′ dihitung dengan menyelesaikan peersamaan
c1u2u2u2 =
[−11
]
+c2
[11
]
=
[10
]
dan d1u2u2u2 =
[−11
]
+d2
[11
]
=
[01
]
.
Penyelesaian tunggal persamaan tersebut adalahc1 = −12,c2 =
12 dand1 =
12,d2 =
12. Dengan demikian matriks transisi diberikan oleh
[I ]B′
B =
[−1
212
12
12
]
.
b. KarenaB adalah basis baku, maka vektor koordinat darivvv relatif terhadapB
adalah[vvv]B =
[34
]
. Jadi vektor koordinat darivvv relatif terhadap basisB′
adalah
[vvv]B′ =
[−1
212
12
12
][34
]
=
[1272
]
c. Dengan menggunakan koordinat darivvv terhadap dua basisB danB′, didapat
3
[10
]
+4
[01
]
= vvv=12
[−11
]
+72
[11
]
.
d. Gambar berikut menunjukkan bahwa lokasi titik akhir(3,4) dari vektorvvvrelatif terhadap sumbue1e1e1e2e2e2 dan sumbuu1u1u1u2u2u2.

120
e1e1e1
e2e2e2u1u1u1 u2u2u2vvv
Invers dari suatu Matriks TransisiFakta yang akan bermanfaat bahwa matriks transisi diantarabasis terurutB danB′ dari suatu ruamg vektor berdimensi hingga atas suatu lapanganK adalah mem-punyai invers. Lagi pula, matriks transisi dariB′ ke B adalah invers dari matriks[I ]B
′B . Untuk menyelidiki fakta ini misalkan ruang vektorV berdimensin atas
suatu lapanganK dengan basis terurut
B= v1v1v1,v2v2v2, . . . ,vnvnvn dan B′ = u1u1u1,u2u2u2, . . . ,ununun.
Untuk menunjukkan bahwa[I ]B′
B mempunyai invers, misalkanxxx∈ Rn memenuhi
[I ]B′
B xxx= 000.
Perhatikan bahwa bagian kiri persamaan dalam bentuk vektoradalah
x1[v1v1v1]B′+ · · ·+xn[vnvnvn]B′.
KarenaB adalah basis, maka vektorvivivi untuk 1≤ i ≤ n adalah bebas linier. Jugadengan begitu vektor-vektor[v1v1v1]B′, . . . , [vnvnvn]B′ adalah bebas linier. Jadix1 = x2 =
· · ·= xn = 0. Karena penyelesaian persamaan homogin[I ]B′
B xxx=000 hanyalah mem-punyai penyelesaian trivial, maka matriks[I ]B
′B mempunyai invers. Lagi pula,
karena
[vvv]B′ = [I ]B′
B [vvv]B dan bahwa(
[I ]B′
B
)−1[vvv]B′ = [vvv]B′,
maka
[I ]BB′ =(
[I ]B′
B
)−1.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 121
Apa yang telah dibahas ini diringkas dalam sifat berikut.
SifatMisalkanV suatu ruang vektor berdimensin atas suatu lapanganK dengan basisterurut
B= v1v1v1,v2v2v2, . . . ,vnvnvn dan B′ = u1u1u1,u2u2u2, . . . ,ununun.
Maka matriks transisi[I ]B′
B mempunyai invers dan
[I ]BB′ =(
[I ]B′
B
)−1.
5.8 Ruang Bagian Fundamental
Diisini dibahas ruang bagian fundamental dari suatu matriks yang mencakup ru-ang null, Range, ruang baris dan ruang.
5.9 Ruang Hasil Kali Dalam
disini dibahas suatu ruang vektor khusus dan diberikan pengertian hasil kalidalam.
5.10 Basis Orthonormal
disini dikembangkan dan digunakan proses Gram-Schmidt untuk mengkonstruksisuatu basis orthogonal/orthonormal dari suatu ruang hasilkali dalam.
5.11 Kuadrat Terkecil (Least Square)
disini diberikan suatu aplikasi dari beberapa ide yang akandibahas.
122
5.12 DekomposisiQR
disini dibahas dekomposisiQR dari suatu matriks dan bagaimana dekomposisiini digunakan dalam proses kuadrat terkecil.
5.13 Matriks Orthogonal
disini dibahas pengertian matriks orthogonal.
5.14 General Invers
disisni dibahas general invers dari suatu matriks.
Bab 6Nilai-Karakteristik dan Vektor-Karakteristik
6.1 Sekilas Mengenai Determinan
disini secara ringkas diulang lagi determinan.
6.2 Nilai-Karakteristik dan Vektor-Karakteristik
disini dibahas konsep dari nilai karakteristik dan vektor karakteristik.
6.3 Eksistensi Nilai-Karakteristik dan Vektor-Karakteristi k
disini dibahas eksistensi dari suatu nilai karakteristik dan vektor karakteristik.
6.4 Sifat-sifat Nilai-Karakteristik dan Vektor-Karakterist ik
disini dibahas beberapa sifat nilai karakteristik dan vektor karakteristik.
6.5 Kesimilaran dan Pendiagonalan
disini dibahas kesimilaran pendiagonalan matriks.
123

124

Bab 7Transformasi Linear
Bila V danW adalah ruang vektor atas suatu lapanganK, maka suatupemetaanT dariV keW adalah suatu fungsi mengaitkan setiap vektorvvv∈V dengan tung-gal kesuatu vektorwww∈W. Dalam hal ini dikatakanT memetakanV kedalamWdan ditulisT : V →W. Untuk masing-masingvvv∈V, maka vektorwww = T(vvv) diW adalahimagedarivvv oleh pemetaanT.
Contoh 1.Didefinisikan suatu pemetaanT : R2→ R2 oleh
T
([xy
])
=
[x+yx−y
]
.
a. Dapatkan image dari vektor koordinate1e1e1 dane2e2e2 oleh pemetaanT.
b. Berikan suatu uraian dari semua vektor diR2 yang dipetakan ke vektor nol.
c. Tunjukkan bahwaT memenuhi
T(uuu+vvv) = T(uuu)+T(vvv) (mempertahankan penjumlahan ruang vektor)
danT(kvvv) = kT(vvv) (mempertahankan perkalian skalar),
untuk semua vektoruuu danvvv di R2 dan semua skalark∈ R.
Jawab.
125

126
a. Karenae1e1e1 =
[10
]
dane2e2e2 =
[01
]
, maka didapat
T(e1e1e1) =
[1+01−0
]
=
[11
]
dan T(e2e2e2) =
[0+10−1
]
=
[1−1
]
.
b. Untuk menjawab bagian ini, diselesaikan persamaan
T
([xy
])
=
[x+yx−y
]
=
[00
]
atau dalam bentuk sistem persamaan linier{
x+y = 0x−y = 0
Didapat penyelesaian tunggalx = 0,y = 0. Jadi hanya satu vektor diR2
(domain) yaitu
[00
]
yang dipetakan olehT ke
[00
]
.
c. Untuk menunjukkan bahwaT mempertahankan jumlahan ruang vektor, mis-alkan sebarang vektoruuu danvvv di R2
uuu=
[u1
u2
]
dan vvv=
[v1
v2
]
.
Maka
T(uuu+vvv) = T
([u1
u2
]
+
[v1
v2
])
= T
([u1+v1
u2+v2
])
=
[(u1+v1)+(u2+v2)
(u1+v1)−(u2+v2)
]
=
[u1+u2
u1−u2
]
+
[v1+v2
v1−v2
]
= T
([u1
u2
])
+T
([v1
v2
])
= T(uuu)+T(vvv).

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 127
Juga didapat untuk sebarangk∈ R, maka
T(kuuu) = T
([ku1
ku2
])
=
[ku1+ku2
ku1−ku2
]
= k
[u1+u2
u1−u2
]
= kT(uuu).
Contoh yang baru saja dibahas adalah suatu pemetaanT dari ruang vektorV keruang vektorW atas suatu lapanganK yang memenuhi dua sifat
T(uuu+vvv) = T(uuu)+T(vvv) dan T(kuuu) = kT(uuu),
untuk semuauuu,vvv di V dan semuak di K. Dua sifat ini digabung menjadi satu,maka diperoleh pengertian berikut.
MisalkanV danW adalah ruang vektor atas suatu lapanganK. PemetaanT :
V→W dinamakan suatutransformasi linier bila dan hanya bila
T(kuuu+vvv) = kT(uuu)+T(vvv),
untuk semuauuu,vvv di V dan semuak di K. Dalam halV =W, makaT dinamakanoperator linier .
Contoh 2Diberikan matriksA berukuranm×n. Didefinisikan pemetaanT :Rn→Rm oleh
T(xxx) = Axxx,∀xxx∈ Rn.
a. Tunjukkan bahwaT adalah suatu transformasi linier.
b. MisalkanA adalah matriks 2×3
A=
[1 2 −1−1 3 2
]
.

128
Dapatkan bayangan dari
111
dan
7−15
oleh pemetaanT : R3→ R2 dimanaT(xxx) = Axxx, ∀xxx∈ R3.
Jawab
a. Untuk semua vektoruuu danvvv di Rn dan semua skalark di R berlaku
A(kuuu+vvv) = kAuuu+Avvv.
JadiT(kuuu+vvv) = A(kuuu+vvv) = kAuuu+Avvv= kT(uuu)+T(vvv).
b. KarenaT didefinisikan oleh perkalian matriks, maka didapat
T
111
=
[1 2 −1−1 3 2
]
111
=
[24
]
dan
T
7−15
=
[1 2 −1−1 3 2
]
7−15
=
[00
]
.
Contoh 3Diberikan suatu transformasi linierT : R3→ R2 oleh
T
xyz
=
[xy
]
.
a. Diskusikan tindakan dariT pada suatu vektor diR3 dan berikan suatu in-tepretasi geometri dari persamaan
T
101
+
011
= T
101
+
011
.
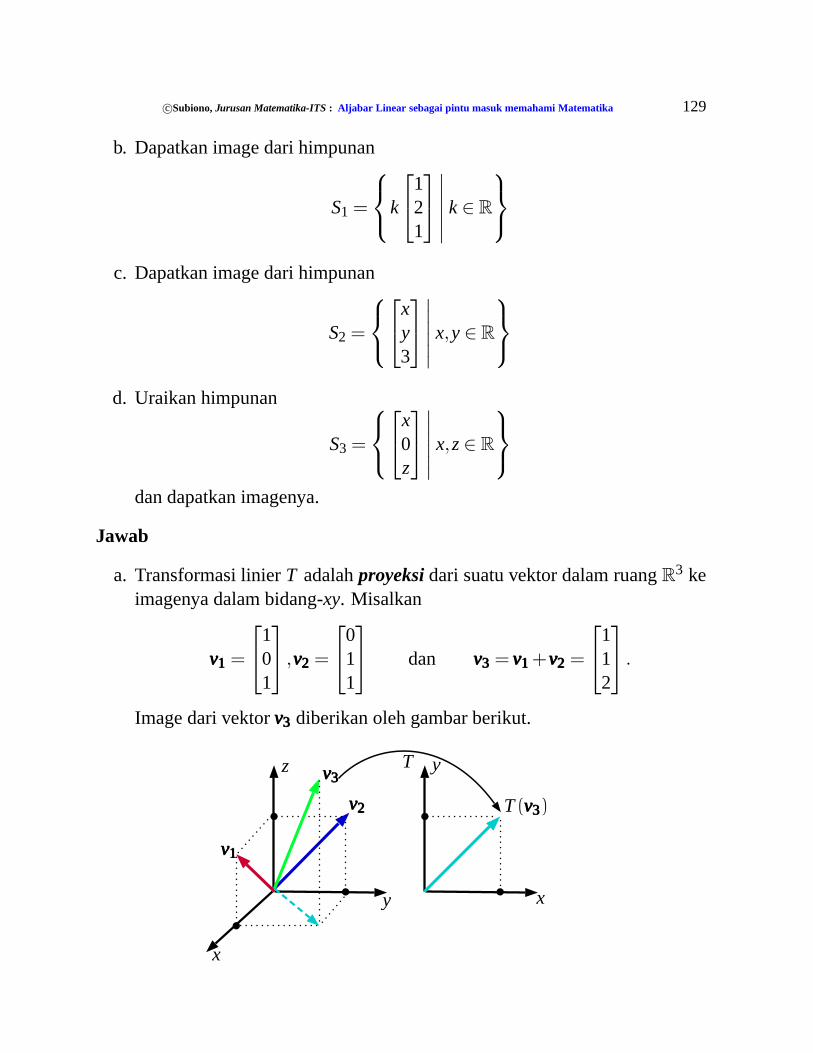
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 129
b. Dapatkan image dari himpunan
S1 =
k
121
∣∣∣∣∣∣
k∈ R
c. Dapatkan image dari himpunan
S2 =
xy3
∣∣∣∣∣∣
x,y∈ R
d. Uraikan himpunan
S3 =
x0z
∣∣∣∣∣∣
x,z∈ R
dan dapatkan imagenya.
Jawab
a. Transformasi linierT adalahproyeksidari suatu vektor dalam ruangR3 keimagenya dalam bidang-xy. Misalkan
v1v1v1 =
101
,v2v2v2 =
011
dan v3v3v3 = v1v1v1+v2v2v2 =
112
.
Image dari vektorv3v3v3 diberikan oleh gambar berikut.
x
y
z
b
b
v1v1v1
v2v2v2
b
v3v3v3
x
y
T(v3v3v3)b
b
T

130
b. HimpunanS1 adalah suatu bidang dalam ruangR3 dengan vektor arah
121
.
Dengan definisi dariT didapat
T(S1) =
{
k
[12
]∣∣∣∣k∈ R
}
adalah suatu garis dalam bidangR2 melalui titik asal dengan gradien samadengan 2.
c. HimpunanS2 adalah suatu bidang dalam ruangR3 diatas 3 satuan sejajardengan bidang-xy. Dalam hal ini
T(S2) =
{[xy
]∣∣∣∣
x,y∈ R
}
.
Jadi image dariS2 adalah seluruh bidang-xyhal ini sesuai uraianT sebagaisuatu proyeksi sebagai mana yang diharapkan.
d. HimpunanS3 adalah bidang-xzdalam ruangR3. Dalam hal ini didapat
T(S3) =
{[x0
]∣∣∣∣
x∈ R
}
yang merukan sumbu-x. Lagi, hal ini sesuai uraianT sebagai suatu proyeksisebagai mana yang diharapkan.
Contoh berikut digunakan turunan dari suatu fungsi untuk mendefinisikan suatutransformasi linier diantara ruang vektor dari polinomial.
Contoh 4Didefinisikan suatu pemetaanT : P3(R)→ P2(R) oleh
T(p(x)) =dp(x)
dx,∀p(x) ∈ P3(R).
a. Tunjukkan bahwaT adalah suatu transformasi linier
b. Dapatkan image dari polinomialp(x) = 3x3+2x2−x+2.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 131
c. Uraikan polinomial dalamP3(R) yang dipetakan ke vektor nol diP2(R).
JawabPerhatikan bahwa sebarangp(x) ∈ P3(R) mempunyai bentuk
p(x) = ax3+bx2+cx+d,
jadi
T(p(x)) =dp(x)
dx= 3ax2+2bx+c.
Karenadp(x)dx di P2(R), makaT adalah suatu pemetaan dariP3(R) ke P2(R).
a. Untuk menunjukkan bahwaT adalah suatu pemetaan linier, misalkan se-barangp(x) danq(x) di P3(R) dan sebarangk∈ R, Didapat
T(kp(x)+q(x)) =ddx
(kp(x)+q(x))
=ddx
(kp(x))+ddx
(q(x))
= kdp(x)
dx+
dq(x)dx
= kT(p(x))+T(q(x)).
Jadi pemetaanT adalah suatu pemetaan linier.
b. Image dari polinomialp(x) = 3x3+2x2−x+2 adalah
T(p(x)) =ddx
(3x3+2x2−x+2) = 9x2+4x−1.
c. Polinomial diP3(R) yang mempunyai derivatif sama dengan nol adalahpolinomial konstanp(x) = k, dimanak∈ R.
Proposisi 1Misalkan suatu transformormasi linierT :V→W, makaT(0V0V0V) = 0W0W0W.
BuktiKarenaT adalah transformasi linier didapat
T(0V0V0V) = T(0V0V0V +0V0V0V) = T(0V0V0V)+T(0V0V0V).

132
Kedua ruas persamaan tambahkan dengan−T(0V0V0V) didapat
0W0W0W =−T(0V0V0V)+T(0V0V0V) = (−T(0V0V0V)+T(0V0V0V))+T(0V0V0V) = T(0V0V0V).
Contoh 5Didefinisikan suatu pemetaanT : R2→ R2 oleh
T
([xy
])
=
[ex
ey
]
,∀[xy
]
∈ R2.
Tentukan apakahT suatu pemetaan linier.
JawabKarena
T(0R20R20R2) = T
([00
])
=
[e0
e0
]
=
[11
]
,
maka dengan menggunakan Proposisi 1 pemetaanT bukan suatu transformasilinier.
Contoh 6Didefinisikan suatu pemetaanT : Mm×n(R)→Mn×m oleh
T(A) = At, ∀A∈Mm×n(R),
dimana tandat adalah transpose. Tunjukkan bahwaT adalah suatu pemetaanlinier.
JawabSebagai mana diketahui untuk setiapA,B∈Mm×n(R), maka(A+B)t = At +Bt.Dengan demikian didapat
T(A+B) = (A+B)t = At +Bt = T(A)+T(B).
Juga
T(kA) = (kA)t = kAt = kT(A),∀A∈Mm×n(R) dan k∈ R.
JadiT adalah suatu transformasi linier.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 133
Contoh 7MisalkanV adalah suatu ruang vektor atas suatu lapanganK dengan dim(V) = ndan
B= v1v1v1,v2v2v2, . . . ,vnvnvn
adalah suatu basis terurut untukV. MisalkanT :V→ Kn adalah pemetaan yangmemetakan suatu vektorvvv di V ke vektor koordinatnya diKn relatif terhadapbasisB. Yaitu
T(vvv) = [vvv]B.
Pemetaan ini terdefinisi dengan baik sebab vektor koordinatdari vvv relatif ter-hadap basisBadalah tunggal. Tunjukkan bahwa pemetaanT adalah suatu pemetaanlinier.
JawabMisalkanuuu danvvv sebarang vektor diV dan sebarangk∈ K. KarenaB adalah su-atu basis terurut, maka dapat dipilih dengan tunggal skalarc1, . . . ,cn dand1, . . . ,dn
di K yang memenuhi
uuu= c1v1v1v1+ . . .+cnvnvnvn dan vvv= d1v1v1v1+ . . .+dnvnvnvn.
GunakanT pada vektorkuuu+vvv didapat
T(kuuu+vvv) = T((kc1+d1)v1v1v1+ . . .+(kcn+dn)v1v1v1)
=
kc1+d2
kc2+d2...
kcn+dn
= k
c1
c2...
cn
+
d1
d2...
dn
= kT(uuu)+T(vvv).
Terlihat bahwa pemetaanT adalah suatu transformasi linier.

134
Sebagaimana telah disebutkan bilaT : V →W adalah suatu pemetaan linier,maka struktur dariV dipertahankan ketika dipetakan keW. Secara khusus, im-age dari suatu kombinasi kombinasi linier dari vektor-vektor terhadap pemetaanlinier ini sama dengan kombinasi linier dari vektor-vektorimagenya dengan koe-fisien yang sama. Untuk menunjukkan hal ini, misalkanV danW adalah ruangvektor atas suatu lapanganK danT : V →W adalah suatu transformasi linier.Maka dengan pengulangan definisi transformasi linier, didapat
T(c1v1v1v1+c2v2v2v2+ · · ·+cnvnvnvn) = T(c1v1v1v1)+T(c2v2v2v2)+ · · ·+T(cnvnvnvn)
= c1T(v1v1v1)+c2T(v2v2v2)+ · · ·+cnT(vnvnvn).
Fakta bahwa suatu transformasi linierT diantara ruang vektorV dengan ruangvektorW atas suatu lapanganK mempertahankan kombinasi linier adalah suatuyang berguna dalam perhitungan ketikaT bertindak pada vektor-vektor dari su-atu basis dariV diketahui. Hal ini dijelaskan dalam contoh berikut.
Contoh 8DiberikanT : R3→ R2 adalah suatu transformasi linier dan misalkanB adalahsuatu basis terurut baku untukR3. Bila
T(e1e1e1) =
[11
]
,T(e2e2e2) =
[−12
]
dan T(e3e3e3) =
[01
]
,
maka dapatkanT(vvv) bila
vvv=
132
JawabUntuk mendapatkan image dari vektorvvv tulis vektor tersebut sebagai kombinasilinier dari vektor-vektor basis terurutB, didapat
vvv= e1e1e1+3e2e2e2+2e3e3e3.
GunakanT pada kombinasi linier tersebut dan gunakan sifat kelinieran dariT,

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 135
didapat
T(vvv) = T(e1e1e1+3e2e2e2+2e3e3e3)
= T(e1e1e1)+3T(e2e2e2)+2T(v3v3v3)
=
[11
]
+3
[−12
]
+2
[01
]
=
[−29
]
.
Contoh 9Misalkan T : R3→ R3 adalah suatu operator linier danB adalah suatu basisterurut untukR3 diberikan oleh
B=
111
,
123
,
112
.
Bila
T =
111
=
111
,T =
123
=
−1−2−3
dan T =
112
=
224
,
maka dapatkan
T =
236
.
JawabKarenaB adalah suatu basisuntukR3, pilih skalark1,k2 dank3 yang memenuhipersamaan
k1
111
+k2
123
+k3
112
=
236
.
Selesaikan persamaan ini, didapatk1 =−1,k2 = 1 dank3 = 2. Jadi
T
236
= T
−1
111
+
123
+2
112
.
136
Dengan menggunakan kelinieran dariT didapat
T
236
= −1T
111
+T
123
+2T
112
= −
111
+
−1−2−3
+2
224
=
214
.
Operasi dengan Transformasi LinierTransformasi linier dapat dikombinasikan dengan menggunakan tambah biasadan perkalian skalar untuk menghasilkan transformasi linier baru. MisalkanS,T : R2→ R2 didefinisikan oleh
S
([xy
])
=
[x+y−x
]
dan T
([xy
])
=
[2x−yx+3y
]
.
Kemudian didefinisikan
(S+T)(vvv)def= S(vvv)+T(vvv) dan (kT)(vvv)
def= k(T(vvv)), ∀vvv∈ R2,k∈ R.
Untuk mengilustrasikan definisi ini, misalkanvvv=
[2−1
]
, maka
(S+T)(vvv) = S(vvv)+T(vvv) =
[2+(−1)
−2
]
+
[2(2)−(−1)2+3(−1)
]
=
[6−3
]
.
Untuk perkalian dengan skalar, misalkank= 3. Maka didapat
(3T)(vvv) = 3T(vvv) = 3
[5−1
]
=
[15−3
]
.
Dalam teorema berikut ditunjukkan bahwa operasi-operasi yang telah dibahasmenghasilkan transformasi linier.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 137
Teorema 7.0.1MisalkanV danW adalah ruang vektor atas suatu skalarK danS,T :V→W adalah transformasi linier. PemetaanS+T yang didefinisikan oleh
(S+T)(vvv)def= S(vvv)+T(vvv), ∀vvv∈V
adalah suatu transformasi linier dariV keW. Bila c adalah sebarang skalar diK,maka pemetaancT didefinisikan oleh
(cT)(vvv)def= cT(vvv), ∀vvv∈ V
adalah transformasi linier dariV keW.
Bukti Misalkan sebaranguuu,vvv∈V dan sebarang skalark∈ K. Maka
(S+T)(kuuu+vvv) = S(kuuu+vvv)+T(kuuu+vvv)
= S(kuuu)+S(vvv)+T(kuuu)+T(vvv)
= kS(uuu)+S(vvv)+kT(uuu)+T(vvv)
= k(S(uuu)+T(uuu))+S(vvv)+T(vvv)
= k(S+T)(uuu)+(S+T)(vvv).
Terlihat bahwaS+T adalah suatu transformasi linier. Juga, untuk sebarangc∈Kdidapat
(cT)(kuuu+vvv) = c(T(kuuu+vvv))
= c(T(kuuu)+T(vvv))
= c(kT(uuu)+T(vvv))
= (ck)T(uuu)+cT(vvv)
= k(cT)(uuu)+(cS)(vvv).
Jadi,cT adalah suatu transformasi linier.
Dengan menggunakan jumlah dua transformasi linier dan perkalian denganskalar yang didefinisikan dalam Teorema7.0.1, himpunan dari semua transfor-masi linier diantara dua ruang vektor yang diberikan atas suatu lapangan yangsama adalah suatu ruang vektor dinotasikan olehL(U,V).
Sebagaimana telah dibahas dalam Contoh 2, setiap matriksA berukuranm×n mendefinisikan suatu pemetaan linier dariKn ke Km. Juga, bila matriksB

138
berukurann× p, makaB mendefinisikan suatu pemetaan linier dariKp ke Kn.Maka perkalian matriksAB berukuranm× p mendefinisikan suatu transformasilinier dari Kp ke Kn. Pemetaan ini berkaitan dengan komposisi dari pemetaanyang didefinisikan melaluiA danB.
Teorema 7.0.2MisalkanU,V danW adalah ruang vektor atas suatu lapanganyang sama. BilaT : V → U danS : U →W adalah transformasi linier, makapemetaan komposisiS◦T :V→W, didefinisikan oleh
(S◦T)(vvv)def= S(T(vvv)), ∀vvv∈V
adalah suatu transformasi linier (lihat gambar berikut).
V U WT
S
S◦T(vvv)
vvvT(vvv)
bb
b
BuktiUntuk membuktikanS◦T adalah suatu transformasi linier, misalkan sebarangvektorv1v1v1 danv2v2v2 di V dan sebarang skalark ∈ K. GunakanS◦T padakv1v1v1+v2v2v2,didapat
(S◦T)(kv1v1v1+v2v2v2) = S(T(kv1v1v1+v2v2v2))
= S(kT(v1v1v1)+T(v2v2v2))
= S(kT(v1v1v1))+S(T(v2v2v2))
= kS(T(v1v1v1))+S(T(v2v2v2))
= k(S◦T)(v1v1v1)+(S◦T)(v2v2v2).
Terlihat bahwaS◦T adalah suatu pemetaan linier.
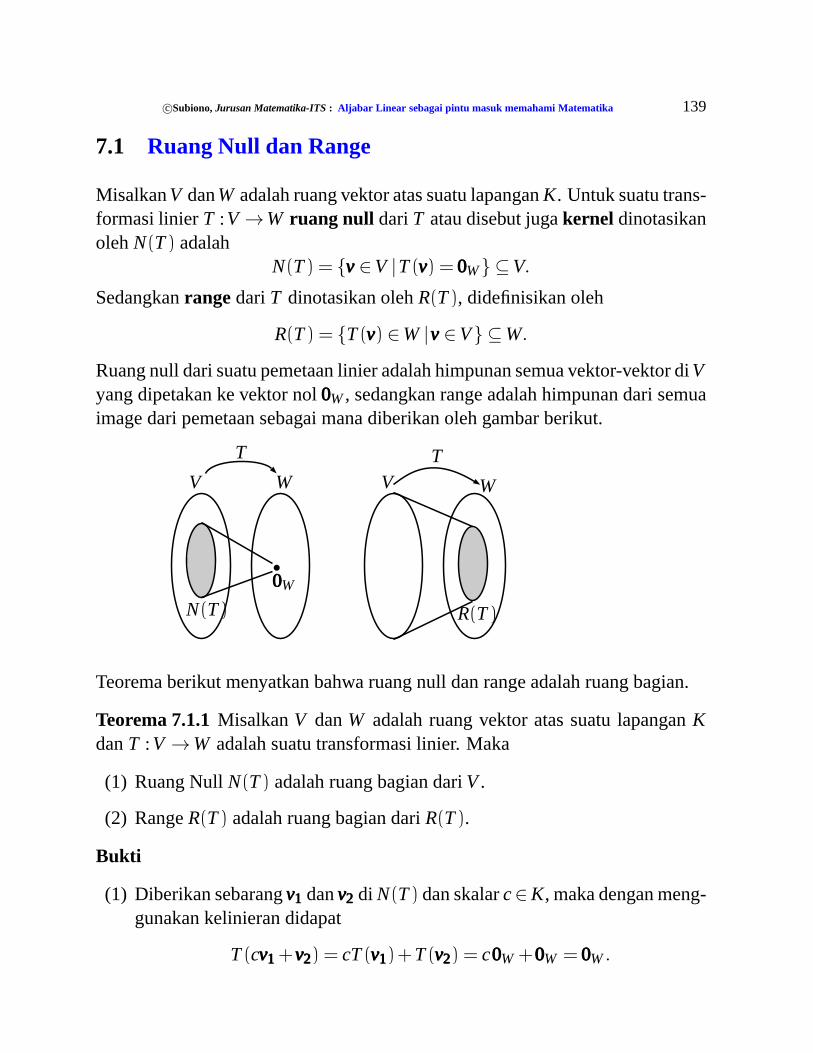
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 139
7.1 Ruang Null dan Range
MisalkanV danW adalah ruang vektor atas suatu lapanganK. Untuk suatu trans-formasi linierT :V→W ruang null dariT atau disebut jugakernel dinotasikanolehN(T) adalah
N(T) = {vvv∈V |T(vvv) = 000W} ⊆V.
Sedangkanrange dariT dinotasikan olehR(T), didefinisikan oleh
R(T) = {T(vvv) ∈W |vvv∈V} ⊆W.
Ruang null dari suatu pemetaan linier adalah himpunan semuavektor-vektor diVyang dipetakan ke vektor nol 000W, sedangkan range adalah himpunan dari semuaimage dari pemetaan sebagai mana diberikan oleh gambar berikut.
b
V W V W
N(T)
000W
R(T)
T T
Teorema berikut menyatkan bahwa ruang null dan range adalahruang bagian.
Teorema 7.1.1MisalkanV danW adalah ruang vektor atas suatu lapanganKdanT :V→W adalah suatu transformasi linier. Maka
(1) Ruang NullN(T) adalah ruang bagian dariV.
(2) RangeR(T) adalah ruang bagian dariR(T).
Bukti
(1) Diberikan sebarangv1v1v1 danv2v2v2 di N(T) dan skalarc∈K, maka dengan meng-gunakan kelinieran didapat
T(cv1v1v1+v2v2v2) = cT(v1v1v1)+T(v2v2v2) = c000W +000W = 000W.
140
Jadicv1v1v1+v2v2v2 di N(T) dengan demikianN(T) adalah subruang dariV.
(2) Diberikan sebarangw1w1w1 danw2w2w2 di R(T), maka dapat dipilihv1v1v1 danv2v2v2 diV yang memenuhiT(v1v1v1) = w1w1w1 danT(v2v2v2) = w2w2w2. Sehingga untuk sebarangc∈ K didapat
T(cv1v1v1+v2v2v2) = cT(v1v1v1)+T(v2v2v2) = cw1w1w1+w2w2w2.
Jadicw1w1w1+w2w2w2 ∈ R(T) dengan demikianR(T) adalah ruang bagian dari ru-ang vektorW.
Contoh 1Diberikan suatu transformasi linierT : R4→ R3 oleh
T
abcd
=
a+bb−ca+d
.
(a) Dapatkan suatu basis dariN(T) dan dimensinya.
(b) Berikan gambaran dariR(T).
(c) Dapatkan suatu basis dariR(T) dan dimensinya.
Jawab
(a) RuangN(T) adalah didapat dengan menjadikan komponen dari imagenyasama dengan nol. Dengan demikian didapat sistem persamaan linier homo-gin:
a+b = 0b−c = 0a+d = 0
Sistem persamaan linier homogin ini mempunyai banyak penyelesaian diberikanoleh
S=
−tttt
∣∣∣∣∣∣∣∣
t ∈ R
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 141
Jadi
N(T) =
⟨
−1111
⟩
.
Suatu basis diN(T) hanya memuat satu vektor
−1111
akibatnya , dim(N(T)) = 1.
(b) Perhatikan bahwa sebarang vektorwww di range bisa ditulis sebagai
www= a
101
+b
110
+c
0−10
+d
001
untuk beberapa bilangan reala,b,c dand. Dengan demikian
R(T) =
⟨
101
,
110
,
0−10
,
001
⟩
.
(c) KarenaR(T) adalah suatu ruang bagian dariR3, maka dim(R(T))≤ 3. Ak-ibatnya, empat vektor yang dihasilkan dalam (b) adalah bergantungan linierdan tidak membentuk suatu basis dariR(T). Perhatikan bahwa tiga vektorpertama dari vektor-vektor tersebut adalah bebas linier. Jadi
B=
101
,
110
,
0−10
adalah bebas linier. Dengan demikianB adalah suatu basisi dariR(T) dandim(R(T)) = 3. Perhatikan jugaB membangunR3, jadi R(T) = R3.

142
Contoh 2Didefinisikan suatu transformasi linierT : P4(R)→ P3(R) oleh
T(p(x)) =dp(x)
dx, ∀p(x) ∈ P4(R).
DapatkanN(T) danR(T).
JawabPerhatikan bahwa semua polinomial konstanp(x) = a untuk semuaa∈Rdidapatdp(x)
dx = 0, maka
N(T) = {p(x) = a|a∈ R}.
Ditunjukkan pemetaanT adalah pada sebagai berikut. Diberikan sebarangq(x)=ax3+bx2+cx+d ∈ P3(R) dapat dipilihp(x) ∈ P4(R) yaitu
p(x) =∫
q(x)dx=∫(ax3+bx2+cx+d)dx=
a4
x4+b
3x3 +c2
x2+dx+e
yang memenuhi
q(x) =d(p(x))
dx= T(p(x)).
Dengan demikian
R(T) = {T(p(x)) | p(x) ∈ P4(R)} = P3(R).
Dalam pembahasan sebelumya telah ditunjukkan bahwa image dari sebarangvvv∈V bisa dihitung bila imageT(vivivi) diketahui untuk masing-masing vektorvivivi dalamsuatu basis dariV. Hal ini juga ditunjukkan dalam teorema berikut.
Teorema 7.1.2Bila V danW adalah ruang vektor berdimensi hingga atas suatulapanganK dan
B= {v1v1v1,v2v2v2, . . . ,vnvnvn}adalah suatu basis untukV. Bila T :V→W adalah suatu pemetaan linier, maka
R(T) = 〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn).}〉
Bukti Untuk menunjukkan bahwa dua himpunan sama adalah masing-masingmerupakan himpunan bagian dari yang lainnya. Pertama, Bilawww∈ R(T), makadapat dipilih suatu vektorvvv∈V yang memenuhiT(vvv) =www. Selanjutnya, karena

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 143
B adalah suatu basis dariV, maka juga dapat dipilihc1,c2, . . . ,cn di K yangmemenuhi
vvv= c1v1v1v1+c2v2v2v2+ · · ·+cnvnvnvn.
Sehingga didapat
T(vvv) = T(c1v1v1v1+c2v2v2v2+ · · ·+cnvnvnvn).
Dengan menggunakan kelinieran dariT, didapat
www= T(vvv) = c1T(v1v1v1)+c2T(v2v2v2)+ · · ·+cnT(vnvnvn).
Terlihat bahwa sebarangwww∈R(T) merupakan kombinasi linier dari vektor-vektor
T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn).
Jadiwww∈ 〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn).}〉. Dengan demikian
R(T)⊆ 〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn).}〉 .
Sebaliknya, misalkan bahwa sebarang vektor
www∈ 〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn)}〉 .
Maka dapat dipilih skalar-skalark1,k2, . . . ,kn di K yang memenuhi
www = k1T(v1v1v1)+k2T(v2v2v2)+ · · ·+knT(vnvnvn)
= T(k1v1v1v1)+T(k2v2v2v2)+ · · ·+T(knvnvnvn)
= T(k1v1v1v1+k1v2v2v2+ · · ·+knvnvnvn).
Terlihat bahwawww adalah image dari kombinasi linier
k1v1v1v1+k1v2v2v2+ · · ·+knvnvnvn
yang merupakan suatu elemen dariV. Jadiwww∈ R(T), dengan demikian
〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn)}〉 ⊆ R(T).
AkibatnyaR(T) = 〈{T(v1v1v1),T(v2v2v2), . . . ,T(vnvnvn)}〉.

144
Contoh 3MisalkanT : |R3→R3 adalah suatu operator linier danB= {v1v1v1,v2v2v2,v3v3v3}adalah suatu basis untukR3 yang memenuhi
T(v1v1v1) =
110
, T(v2v2v2) =
10−1
, T(v3v3v3) =
21−1
.
a. Apakah
121
di R(T)?
b. Dapatkan suatu basis untukR(T).
c. Dapatkan ruang nullN(T).
Jawab
a. Dari Teorema7.1.2vektorwww=
121
di R(T) bila ada skalark1,k2 dank3 di
R yang memenuhi
k1T(v1v1v1)+k2T(v2v2v2)+k3T(v3v3v3) =
121
,
yaitu
k1
110
+k2
10−1
+k3
21−1
=
121
.
Himpunan penyelesaian dari sistem persamaan linier ini diberikan oleh
S= {(2− r,−1− r, r) | r ∈ R}.Khususnya bilar = 0, makak1 = 2,k2 =−1 dank3 = 0. Jadiwww∈ R(T).
b. Untuk mendapatkan suatu basis dariR(T), lakukan operasi baris elementermatriks
1 1 21 0 10 −1 1
untuk memperoleh
1 0 10 1 10 0 0
.
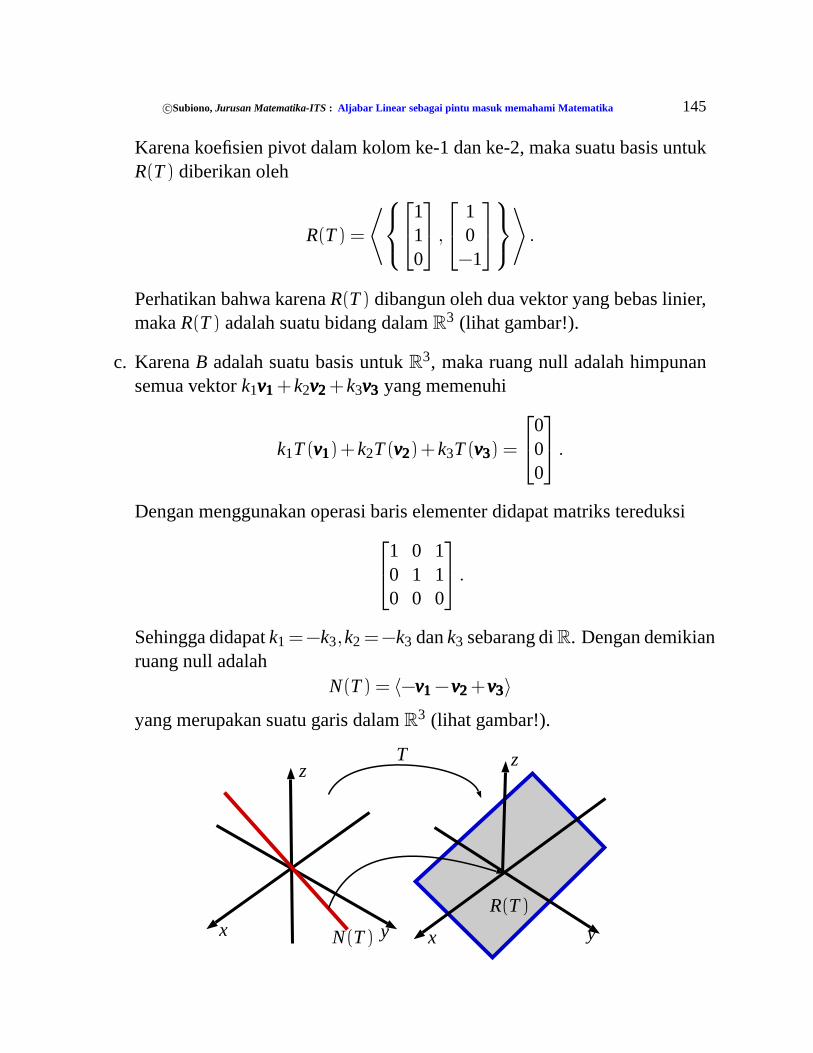
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 145
Karena koefisien pivot dalam kolom ke-1 dan ke-2, maka suatu basis untukR(T) diberikan oleh
R(T) =
⟨
110
,
10−1
⟩
.
Perhatikan bahwa karenaR(T) dibangun oleh dua vektor yang bebas linier,makaR(T) adalah suatu bidang dalamR3 (lihat gambar!).
c. KarenaB adalah suatu basis untukR3, maka ruang null adalah himpunansemua vektork1v1v1v1+k2v2v2v2+k3v3v3v3 yang memenuhi
k1T(v1v1v1)+k2T(v2v2v2)+k3T(v3v3v3) =
000
.
Dengan menggunakan operasi baris elementer didapat matriks tereduksi
1 0 10 1 10 0 0
.
Sehingga didapatk1=−k3,k2=−k3 dank3 sebarang diR. Dengan demikianruang null adalah
N(T) = 〈−v1v1v1−v2v2v2+v3v3v3〉yang merupakan suatu garis dalamR3 (lihat gambar!).
Tz
x y x y
z
N(T)
R(T)

146
Teorema 7.1.3DiberikanV danW adalah ruang vektor berdimensi hingga atassuatu lapangan yang sama yaituK. Bila T : V →W adalah suatu transformasilinier, maka
dim(V) = dim(R(T))+dim(N(T)).
Bukti Misalkan bahwa dim(V) = n. Untuk pembuktian teorema ditinjau tiga ka-sus. Pertama, untuk dimN(T) = dimV = n. Dalam kasus ini, bayangan (image)dari setiap vektor diV adalah vektor nol 000W ∈W, dengan demikianR(T)= {0V}.Sehingga didapat
n= dimV = dimR(T)+dim(N(T)) = 0+n.
Selanjutnya, untuk 1≤ r = dimN(T) < n. Misalkanvvv1,vvv2, . . . ,vvvr adalah suatubasis untukN(T). Perluas basis ini diV sehingga dapat dipilih vektor-vektor diV
vvvr+1,vvvr+2, . . . ,vvvn
yang semuanya bukan diN(T) dan memenuhi
vvv1,vvv2, . . . ,vvvr ,vvvr+1,vvvr+2, . . . ,vvvn
adalah suatu basis dariV. Ditunjukkan bahwa himpunan
S= {T(vvvr+1),T(vvvr+2), . . . ,T(vvvn)}
adalah suatu basis diR(T). Menurut Teorema7.1.2didapat
R(T) = 〈{T(vvv1),T(vvv2), . . . ,T(vvvr),T(vvvr+1),T(vvvr+2), . . . ,T(vvvn)}〉 .
KarenaT(vvv1) = T(vvv2) = · · · = T(vvvr = 000W, maka vektor-vektor diR(T) meru-pakan kombinasi linier dari vektor-vektor
T(vvvr+1),T(vvvr+2), . . . ,T(vvvn).
JadiS= 〈{T(vvvr+1),T(vvvr+2), . . . ,T(vvvn)}〉 = R(T).
Untuk menunjukkan bahwaSbebas linier, tinjau persamaan
kr+1T(vvvr+1)+kr+2T(vvvr+2)+ · · ·+knT(vvvn) = 000W.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 147
KarenaT adalah transformasi linier, maka didapat
T(kr+1vvvr+1+kr+2vvvr+2+ · · ·+knvvvn) = 000W.
Hal ini menunjukkan bahwa
kr+1vvvr+1+kr+2vvvr+2+ · · ·+knvvvn ∈ N(T).
Tetapi {vvv1,vvv2, . . . ,vvvr} adalah suatu basis diN(T), maka dapat dipilih skalark1,k2, . . . ,kr di K yang memenuhi
kr+1vvvr+1+kr+2vvvr+2+ · · ·+knvvvn = k1vvv1+k2vvv2+ · · ·+krvvvr .
Sehingga didapat
−k1vvv1−k2vvv2− · · ·−krvvvr +kr+1vvvr+1+kr+2vvvr+2+ · · ·+knvvvn = 000W.
Karena{vvv1,vvv2, . . . ,vvvr ,vvvr+1,vvvr+2, . . . ,vvvn} adalah suatu basis diV, maka bebas lin-ier dan
k1 = k2 = · · · = kr = kr+1 = kr+2 = · · ·= kn = 0.
Khususnya didapatkr+1 = kr+2 = · · · = kn = 0. Jadin− r vektor
T(vvvr+1),T(vvvr+2), . . . ,T(vvvn)
adalah suatu basis diR(T). Akibatnya
dim(V) = n= (n− r)+ r = dim(R(T))+dim(N(T)).
Terakhir, untukN(T) = {0V}, maka dim(N(T)) = 0. Bila{vvv1,vvv2, . . . ,vvvn} adalahsuatu basis diV, maka dengan menggunakan Teorema7.1.2didapat
R(T) = 〈{T(vvv1),T(vvv2), . . . ,T(vvvn)}〉 .
Dengan argumen yang sama sebagaimana dilakukan sebelumnyadidapat bahwa
{T(vvv1),T(vvv2), . . . ,T(vvvn)}
adalah bebas linier. Jadi dim(N(T))+dim(R(T)) = 0+n= n= dim(V).

148
Contoh 7.1.1Didefinisikan transformasi linierT : P4(R)→ P(R) oleh
T(p(x))def=
d2p(x)dx2 .
Dapatkan dimensi dari rangeT dan berikan diskripsi dari range.
Jawab MisalkanB = {1,x,x2,x3,x4} adalah basis baku untukP4(R). Karenap(x) di N(T) bila dan hanya bila mempunyai derajad 0 atau 1, maka ruang nulladalah runag bagian dariP4(R) yang terdiri dari polinomial berderajad kurangatau sama dengan satu.. Dengan demikian,C = {1,x} adalah suatu basis untukN(T) dan dim(N(T)) = 2. Karena dim(P4(R)) = 5, maka berdasarkan Teo-rema7.1.3didapat
2+dim(R(T)) = 5, jadi dim(R(T)) = 5−2= 3.
Kemudian sebagaimana bukti dalam Teorema7.1.3didapat
{T(x2),T(x3),T(x4)} = {2,6x,12x2}
adalah suatu basis untukR(T). Perhatikan bahwaR(T) adalahP2(R) yang meru-pakan subruang dariP4(R).
7.2 Isomorpisma
Banyak ruang vektor yang sudah dibahas deri pandangan aljabar adalah sama.Dalam bagian ini ditunjukkan bahwa suatuisomorpismayang merupakan su-atu transformasi linier khusus dapat digunakan untuk menjelaskan hubungan di-antara dua ruang vektor. Secara esensi pembahasan berkaitan dengan pemetaansatu-satu(injektif) danpada(surjektif).
Definisi 7.2.1MisalkanU danV adalah ruang vektor atas suatu lapanganK danT :U →V adalah suatu transformasi linier.
1. PemetaanT adalahsatu-satu(injektif) bila uuu 6= vvv berakibat bahwaT(uuu) 6=T(vvv). Yaitu, elemen-elemen yang berbeda diU , harus menghasilkan elemen-elemen image yang berbeda diV.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 149
2. PemetaanT adalahpada (surjektif) bila T(U) = V. Yaitu range dariTadalahV.
PemetaanT dinamakansatu-satu pada(bijektif) bila T adalah satu-satu danpada.
Ketika untuk menunjukkan bahwa suatu pemetaan adalah satu-satu, suatu perny-ataan ekivelen dapat digunakan. Yaitu,T adalah satu-satu bilaT(uuu) = T(vvv) be-rakibat bahwauuu= vvv. Untuk menunjukkan bahwa suatu pemetaan pada, haruslahditunjukkan bahwa bila sebarangvvv di V, maka ada beberapa elemenuuu∈U yangmemenuhiT(uuu) = vvv.
Contoh 7.2.1MisalkanT : R2→ R2 adalah pemetaan yang didefinisikan olehT(uuu) = Auuu, ∀uuu∈ R2 dengan
A=
[1 1−1 0
]
.
Tunjukkan bahwaT adalah pemetaan bijektif.
JawabPertama ditunjukkan bahwaT adalah satu-satu., misalkan
uuu1 =
[a1
b1
]
dan uuu2 =
[a2
b2
]
.
Maka,
T(uuu1) =
[1 1−1 0
][a1
b1
]
=
[a1+b1
a1
]
dan
T(uuu2) =
[1 1−1 0
][a2
b2
]
=
[a2+b2
−a2
]
.
Jadi, bilaT(uuu1) = T(uuu2), maka
[a1+b1
a1
]
=
[a2+b2
−a2
]
.

150
Sehingga didapata1 = a2 danb1 = b2. Dengan demikianuuu1 =uuu2. Jadi,T adalahsatu-satu. Selanjutnya ditunjukkan bahwaT adalah pada. Misalkan sebarang
vvv=
[v1
v2
]
∈ R2. Pilih uuu=
[u1
u2
]
∈ R2 yang memenuhi
T(uuu) =
[1 1−1 0
][u1
u2
]
=
[v1
v2
]
.
Kedua ruas persamaan kalikan dengan invers dari matriksA didapat[u1
u2
]
=
[0 −11 1
][v1
v2
]
=⇒[u1
u2
]
=
[−v2
v1+v2
]
.
Jadi
uuu=
[−v2
v1+v2
]
.
Dengan demikianT adalah pada. KarenaT adalah satu-satu dan pada, makaTadalah bijektif. Suatu argumentasi alternatif adalah menunjukkan bahwa vektorkolom-kolom dariA adalah bebas linier, jadi merupakan suatu basis dariR2.Oleh karena itu, range dariT adalah ruang kolom dariA adalah semua vektor diR2.
Berikut ini diberikan suatu kegunaan dari ruang nul untuk menunjukkan bahwasuatu transformasi linier adalah satu-satu.
Teorema 7.2.1Suatu transformasi linierT : U → V adalah satu-satu bila danhanya bila ruang nul terdiri dari hanya vektor nol diU .
Bukti Misalkan bahwaT adalah satu-satu. Maka ditunjukkan bahwaN(T) ={000U}. Untuk menunjukkan hal ini, misalkan sebarang vektoruuu di N(T), jadiT(uuu) = 000V . Juga,sebgaimana telah diketahuiT(000U) = 000V . KarenaT satu-satu,maka hanyalah vektor noluuu = 000U dipetakan menjadi 000V . JadiN(T) = {000U}.Sebaliknya, misalkan bahwaN(T) = {000U} danT(uuu1) = T(uuu2). Didapat
T(uuu1)−T(uuu2) = 000V =⇒ T(uuu1−uuu2) = 000V .
Jadiuuu1−uuu2∈N(T) = {000U}, sehingga didapatuuu1−uuu2 =000U atauuuu1 =uuu2. dengandemikianT adalah pemetaan satu-satu.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 151
Contoh 7.2.2Didefinisikan suatu operator linierT : R2→ R2 oleh
T
([xy
])
=
[2x−3y5x+2y
]
Tunjukkan bahwaT adalah satu-satu.
JawabSebarang vektor
[xy
]
di N(T) bila dan hanya bila
{2x−3y= 05x+2y= 0
Sistem persamaan linier homogini ini mempunyai jawab trivial x= 0,y= 0. JadiN(T) = {000}. Dengan menggunakan Teorema7.2.1, makaT adalah satu-satu.
Telah diketahui bahwa bilaT :U →V adalah suatu pemetaan linier dan
B= {uuu1,uuu2, . . . ,uuun}
adalah suatu basis untukU , maka
R(T) = 〈{T(uuu1),T(uuu2), . . . ,T(uuun)}〉 .
Suatu pertanyaan adalaah apa syarat bagiT supaya
{T(uuu1),T(uuu2), . . . ,T(uuun)}
adalah juga suatu basis untukR(T)? Teorema berikut menjawab pertanyaan ini.
Teorema 7.2.2MisalkanT :U →V adalah suatu pemetaan linier dan
B= {uuu1,uuu2, . . . ,uuun}
adalah suatu basis untukU . Bila T adalah satu-satu, maka
{T(uuu1),T(uuu2), . . . ,T(uuun)}
152
adalah suatu basis untukR(T).
Bukti Dari Teorema7.1.2, maka
R(T) = 〈{T(uuu1),T(uuu2), . . . ,T(uuun)}〉 .
Jadi, cukup ditunjukkan bahwa
{T(uuu1),T(uuu2), . . . ,T(uuun)}
bebas linier diR(T). Tinjau persamaan
c1T(uuu1)+c2T(uuu2)+ · · ·+cnT(uuun) = 000V
atau ekivalen dengan
T(c1uuu1+c2uuu2+ · · ·+cnuuun) = 000V .
KarenaT adalah satu-satu, makaN(T) = {0U}, jadi
c1uuu1+c2uuu2+ · · ·+cnuuun = 000U .
KarenaB= {uuu1,uuu2, · · · ,uuun} adalah besas linier, makac1 = c2 = · · ·= 0. Dengandemikian
{T(uuu1),T(uuu2), . . . ,T(uuun)}adalah suatu basis untukR(T).
Definisi 7.2.2MisalkanU danV adalah ruang vektor atas suatu lapanganK danT :U →V adalah suatu transformasi linier dimanaT adalah satu-satu dan pada,makaT dinamakanisomorpisma. Dalam hal ini ruang vektorU danV adalahisomorpik dan dinotasikan olehU ∼=V.
Proposisi 7.2.1MisalkanA adalah matriks berukurann× n danT : Rn→ Rn
adalah suatu pemetaan linier yang didefinisikan olehT(xxx) = Axxx, ∀xxx∈Rn. MakaT adalah sautu isomorpisma bila dan hanya bila matriksA mempunyai invers.
Bukti MisalkanA mempunyai invers danbbb sebarang vektor diRn (kodomain).

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 153
Makaxxx= A−1bbb (di domainT) preimagedaribbb. Jadi, pemetaanT adalah pada.Untuk menunjukkan bahwaT pada, perhatikan bahwa persamaanAxxx= 000 hanyamempunyai penyelesaian trivialxxx=A−1000=000. JadiN(T)= {000}, dengan demikianT adalah satu-satu. JadiT adalah satu-satu dan pada. SehinggaT adalah iso-morpisma. Sebaliknya, misalkan bahwaT adalah suatu isomorpisma. MakaT :Rn→Rn adalah pada, maka vektor kolom dariA membangunRn dan karenaRn berdimensin, makavektor-vektor kolom dariA adalah bebas linier. Akibatnyadet(A) 6= 0, jadiA punya invers.
Teorema berikut merupakan hasil utama bahasan pada bagian ini yang berkaitandengan ruang vektor brdimensi hingga.
Teorema 7.2.3Bila V adalah ruang vektor atas suatu lapanganK berdimensin,makaV danRn adalah isomorpik.
Bukti MisalkanB= {vvv1,vvv2, . . . ,vvvn} adalah suatu basis terurut untukV. MisalkanT : V → Rn adalah transformasi koordinat didefinisikan olehT(vvv) = [vvv]B. Di-tunjukkan bahwaT adalah isomorpisma. Pertama ditunjukkan bahwaT adalahsatu-satu. Misalkan bahwaT(vvv) = 000Rn. KarenaB adalah suatu basis, dapat dip-ilih dengan tunggal skalarc1,c2, . . . ,cn yang memenuhi
vvv= c1vvv1+c2vvv2+ · · ·+cnvvvn.
Jadi,
T(vvv) = [vvv]B =
c1
c2...
cn
=
00...0
,
terlihat bahwac1 = c2 = · · · = cn = 0. Dengan demikianN(T) = {000V}, jadi Tadalah satu-satu. Selanjutnya mislkan bahwa
www=
k1
k2...
kn
154
sebarang vektor diRn. Pilih vektorvvv∈V diberikan olehvvv= k1vvv1+k2vvv2+ · · ·+knvvvn. Perhatikan bahwaT(vvv) = www, jadi T adalah pada. Dengan demikianTadalah suatu isomorpisma danV ∼= Rn.
Definisi 7.2.3MisalkanU danV adalah ruang vektor atas suatu lapanganK danT :U →V adalah suatu transformasi linier satu-satu. Pemetaan
T−1 : R(T)→U,
didefinisikan oleh
T−1(vvv) = uuu bila dan hanyabila T(uuu) = vvv,
dinamakaninvers dari T. Bila T pada, makaT−1 didefinisikan pada semuavektor diV.
Proposisi 7.2.2MisalkanU danV adalah ruang vektor atas suatu lapanganKdanT :U→V suatu pemetaan linier satu-satu. Maka pemetaanT−1 : R(T)→Uadalah juga suatu transformasi linier.
Bukti Misalkanvvv1,vvv2 ∈ R(T) dan skalarc ∈ K. Pilih vektoruuu1,uuu2 ∈ U yangmemenuhivvv1 = T(uuu1) danvvv2 = T(uuu2). KarenaT adalah suatu pemetaan liniermaka
T(cuuu1+uuu2) = cT(uuu1)+T(uuu2) = cv1v1v1+vvv2.
JadiT−1(cvvv1+vvv2) = cuuu1+uuu2 = cT−1(vvv1)+T−1(vvv2).
AkibatnyaT−1 adal suatu pemetaan linier.
Kesimpulan 7.2.1MisalkanA adalah suatu matriks berukurann×n yang mem-punyai invers danT : Rn→ Rn pemetaan linier didefinisikan olehT(xxx)Axxx, ∀xxx∈Rn. MakaT−1(xxx) = A−1xxx.
Bukti Bisa digunakan sebagai latihan.
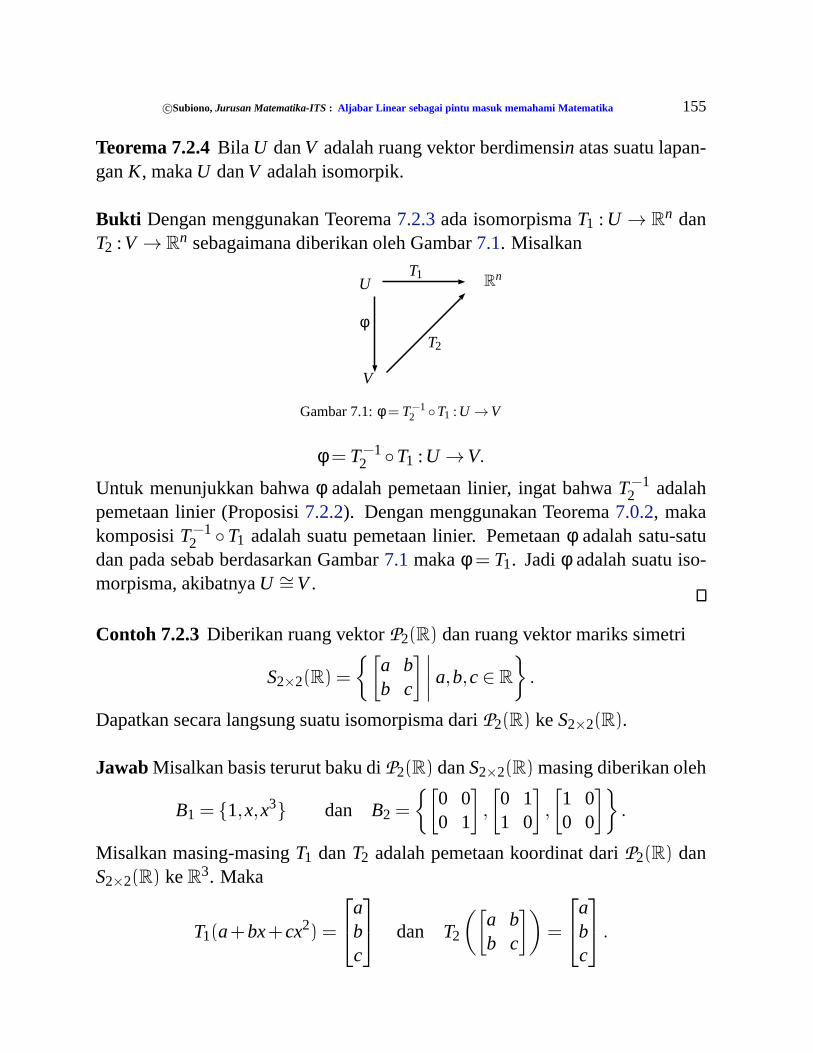
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 155
Teorema 7.2.4Bila U danV adalah ruang vektor berdimensin atas suatu lapan-ganK, makaU danV adalah isomorpik.
Bukti Dengan menggunakan Teorema7.2.3ada isomorpismaT1 : U → Rn danT2 :V→ Rn sebagaimana diberikan oleh Gambar7.1. Misalkan
U
V
Rn
φ
T1
T2
Gambar 7.1:φ = T−12 ◦T1 :U →V
φ = T−12 ◦T1 :U →V.
Untuk menunjukkan bahwaφ adalah pemetaan linier, ingat bahwaT−12 adalah
pemetaan linier (Proposisi7.2.2). Dengan menggunakan Teorema7.0.2, makakomposisiT−1
2 ◦T1 adalah suatu pemetaan linier. Pemetaanφ adalah satu-satudan pada sebab berdasarkan Gambar7.1 makaφ = T1. Jadiφ adalah suatu iso-morpisma, akibatnyaU ∼=V.
Contoh 7.2.3Diberikan ruang vektorP2(R) dan ruang vektor mariks simetri
S2×2(R) =
{[a bb c
]∣∣∣∣a,b,c∈ R
}
.
Dapatkan secara langsung suatu isomorpisma dariP2(R) keS2×2(R).
JawabMisalkan basis terurut baku diP2(R) danS2×2(R) masing diberikan oleh
B1 = {1,x,x3} dan B2 =
{[0 00 1
]
,
[0 11 0
]
,
[1 00 0
]}
.
Misalkan masing-masingT1 danT2 adalah pemetaan koordinat dariP2(R) danS2×2(R) keR3. Maka
T1(a+bx+cx2) =
abc
dan T2
([a bb c
])
=
abc
.
156
Perhatikan bahwaT−12 : R3→ S2×2(R) memetakan vektor
abc
ke matriks simetri
[a bb c
]
.
Jadi, isomorpisma yang diharapkan adalah
T−12 ◦T1 : P2(R)→ S2×2(R)
yang didefinisikan oleh
(T−12 ◦T1)(a+bx+cx2) =
[a bb c
]
, ∀a+bx+cx2 ∈ P2(R).
Misalnya,
(T−12 ◦T1)(1+2x+3x2) = T−1
2 (T1(1+2x+3x2))
= T−12
123
=
[1 22 3
]
.
7.3 Matriks Representasi dari suatu Pemetaan Linier
Diberikan matriksA dengan elemen-elemen diR dan berukuranm×n. Kombi-nasi liner dari vektor-vektor kolom dariA di Rm dinamakanruang kolom dariA dinotasikan oleh kol(A). Juga, didefinisikan ruang nul dari matriksA adalahhimpunan semua vektorxxx∈ Rn yang memenuhiAxxx= 000Rm. Selanjutnya dibahasmatriksA dalam kenteks transformasi linierT : Rn→ Rm adalah suatu transfor-masi linier yang didefinisikan oleh
T(vvv) = Avvv, ∀vvv∈ Rn.
Persamaan ini, dapat ditulis dalam bentuk vektor sebagai
T(vvv) = v1AAA1+v2AAA2+ · · ·+vnAAAn,
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 157
dimanaAAAi adalah vektor kolom dariA danvi adalah komponen ke-i dari vektorvvvuntuk 1≤ i ≤ n. Dalam hal yang demikian,R(T) yang merupakan ruang bagiandariRm adalah sama dengan ruang kolom dariA, yaitu
R(T) = kol(A).
Dimensi dari ruang kolomA dinamakanrank kolom dariA. Juga dapat
N(T) = {vvv∈ Rn |Avvv= 000Rm}= N(A).
Dimensi dariN(A) dinamakannullitas dari A dan menggunakan Teorema7.1.3didapat
rank kolom(A)+nullitas(A) = n.
Suatu ruang bagian yang lain dariRn dikaitkan denganA adalahruang baris dariA, dinotasikan oleh bar(A) dan merupakan hasil bentangan dari vektor-vektorbaris dariA. Karena operasi tanspose memetakan vektor-vektor baris dari A kevektor-vektor klom dariA, ruang baris dariA adalah sama dengan dengan ruangkolom dariAt (tandat adalah transpose), sehingga didapat
bar(A) = kol(At).
Dengan demikian suatu basis dariA dapat diperoeleh dengan melakukan reduksibaris. Kususnya, basis-basis ini adalah vektor-vektor baris taknol dari hasil pere-duksian baris. Sebagai kesimulan adalah
Kesimpulan 7.3.1 rank baris dan rank kolom dari suatu matriksA adalah sama.
Selajutnya didefinisikanrank dari suatu matriksA sebagai dim(bar(A)) ataudim(kol(A)) ditulis rank(A), lagi dengan menggunakan Teorema7.1.3didapat
rank(A)+nullitas(A) = n.
Matriks sudah memainkan peranan penting dalam kajian aljabar linier. Dalamnagian ini dijelaskan keterkaitan diantara matriks dengantransformasi linier. Un-tuk mengilustrasikan ide ini, misalkan diberikan sebarangmatriksA berukuranm×n, dapat didefinisikan suatu transformasi linierT : Rn→ Rm diberikan oleh
T(vvv) = Avvv, ∀vvv∈ Rn.

158
Dalam Contoh 87, telah ditunjukkan bahwa suatu transformasi linierT :R3→R2
adalah secara lengkap ditentuknan oleh image dari vektor-vektor koordinateee1,eee2
daneee3 di R3. Kuncinya adalah menegenali suatu vektorvvv =
v1
v2
v3
bisa ditulis
sebagaivvv= v1eee1+v2eee2+v3eee3,
sehingga didapat
T(vvv) = v1T(eee1)+v2T(eee2)+v3T(eee3).
Dalam contoh ini,T telah didefinisikan, sehingga didapt
T(eee1) =
[11
]
,T(eee2) =
[−12
]
, dan T(eee3) =
[01
]
.
Selanjutnya,matriksAadalah berukuran 2×3 yang mempuyai kolom adalahT(eee1,T(eee2
danT(eee3. Maka untuk sebarangvvv∈ R3 didapat
T(vvv) =
[1 −1 01 2 1
]
vvv= Avvv.
Terlihat bahwa transformasi linierT diberikan oleh suatu perkalian matriks.Umumnya,bilaT :Rn→Rm adalah suatu transformasi linier, maka adalah memu-ngkinkan untuk menulis
T(vvv) = Avvv,
dimanaA adalah matriks berukuranm×n yang mempunyai vektor kolom ke-jadalahT(eeej) untuk j = 1,2, . . . ,n. Matriks A dinamakanrepresentasi matriksdariT relatif terhadap basis bakudi Rn danRm.
Dalam bagian ini akan ditunjukkan bahwa setiap transformasi linier diantararuang vektor berdimensi hingga dapat ditulis sebagai suatuperkalian matriks. Secara umum, misalkanV danW adalah ruang vektor atas suatu lapanganK danmempunyai dimensi berhingga dengan masing-masing basis terurut tetapB danB′. Bila T :V →W adalah suatu transformasi linier, maka ada suatu matriksAyang memenuhi
[T(vvv)]B′ = A[vvv]B. (7.1)

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 159
Dalam kasus iniV ∼= Rn danW∼= Rm; dan masing-masingB danB′ adalah basisbaku diRn danRm. Persamaan7.1ekivalen dengan
T(uuu) = Avvv.
Berikut ini secara rinci dibahas representasi matriks darisuatu pemetaan linier.
Misal V danW adalah ruang vektor berturut-turut dengan basis terurut
B= {vvv1,vvv2, . . . ,vvvn} dan B′ = {www1,www2, . . . ,wwwm}.Selanjutnya, misalkanT :V →W adalah suatu transformasi linier. Berikutnya,diberikan sebarang vektorvvv di V dan misalkan
[vvv]B =
c1
c2...
cn
adalah vektor koordinat darivvv relatif terhadap basisB. Jadi
vvv= c1vvv1+c2vvv2+ · · ·+cnvvvn
Pada persamaan ini kedua sisi kenakanT didapat
T(vvv) = T(c1vvv1+c2vvv2+ · · ·+cnvvvn)
= c1T(vvv1)+c2T(vvv2)+ · · ·+cnT(vvvn). (7.2)
catatan bahwa untuk masing-masingi = 1,2, . . . ,n vektorT(vvvi) di W. Jadi adadengan tunggal skalarai, j dengan 1≤ i ≤mdan 1≤ j ≤ n yang memenuhi
T(vvv1) = a1,1www1+a2,1www2+ · · ·+am,1wwwm
T(vvv2) = a1,2www1+a2,2www2+ · · ·+am,2wwwm...
T(vvvn) = a1,nwww1+a2,nwww2+ · · ·+am,nwwwm.
Jadi, vektor koordinat relatif terhadap basisB′ diberikan oleh
[T(vvvi)]B′ =
a1,i
a2,i...
am,i
, untuk i = 1,2, . . . ,n.

160
Dengan demikian vektor koordinat dari vektorT(vvv) pada Persamaan7.2menjadi
[T(vvv)]B′ = c1
a1,1
a2,1...
am,1
+c2
a1,2
a2,2...
am,2
+ · · ·+cn
a1,n
a2,n...
am,n
(7.3)
atau dalam bentuk persamaan matriks
[T(vvv)]B′ =
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n... ... ... ...
am,1 am,2 . . . am,n
c1
c2...
cn
. (7.4)
Matriks sebelah kanan Perasamaan7.4dinotasikan oleh[T]B′
B , sehingga didapat
[T]B′
B =[[T(vvv1)]B′ [T(vvv2)]B′ · · · [T(vvvn)]B′ .
]
Matriks [T]B′
B dinamakanmatriks dari T relatif terhadap basisBdanB′. DalamkasusT : V → V adalah suatu operator linier danB adalah suatu basis teruruttetap untukV representasi matriks untuk pemetaanT dinotasikan oleh[T]B.
Apa yang telah dibahas ini diringkas dalam kesimpulan berikut:
Kesimpulan 7.3.2MisalkanV danW ruang vektor bedimensi hingga denganmasing-masing basis terurut
B= {vvv1,vvv2, . . . ,vvvn} dan B′ = {www1,www2, . . . ,wwwm}dan misalkanT : V →W adalah suatu transformasi linier. Maka matriks[T]B
′B
adalah representasi matriks dariT relatif terhadap basisB dan B′. Lagipula,koordinat dariT(vvv) relatif terhadap basisB′ diberikan oleh
[T(vvv)]B′ = [T]B′
B [vvv]B.
Misalkan dalam Kesimpulan7.3.2ruang vektorV =W BdanB′ adalah dua basisterurut yang berbedauntukV danT :V→V adalah suatu operator identitas yaituT(vvv) = vvv, f orallvvv ∈ V. Maka [T]B
′B adalah suatu matriks perubahan basis[I ]B
′B
(matriks transisi) yang telah dibahas dalam Bagian5.7.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 161
Contoh 7.3.1Didefinisikan suatu operator linierT : R3→ R3 oleh
T
xyz
=
x−yz
.
a. Dapatkan matriks dariT relatif terhadap basis baku untukR3.b. Gunakan hasil (a) untuk mendapatkan
T
123
Jawaba. MisalkanB= {eee1,eee2,eee3} adalah basis baku untukR3. Karena
[T(eee1)]B =
100
, [T(eee2)]B =
0−10
dan [T(eee3)]B =
001
,
maka
[T]B =
1 0 00 −1 00 0 1
.
b. KarenaB adalah basis baku untukR3, maka
[vvv]B = vvv=
123
.
Sehingga didapat
T(vvv) = [T(vvv)]B =
1 0 00 −1 00 0 1
123
=
1−23
.

162
Berikut ini diberikan ringkasan proses untuk memperoleh representasi matriksdari suatu transformasi linierT :V→W relatif terhadap basisB danB′.
1. Untuk basisB= {vvv1,vvv2, . . . ,vvvn}, dapatkanT(vvv1),T(vvv2), . . . ,T(vvvn).
2. Dapatkan masing-masing koordinat dariT(vvv1),T(vvv2), . . . ,T(vvvn) relatif ter-hadap basis
B′ = {www1,www2, . . . ,wwwm}.Yaitu, dapatkan
[T(vvv1)]B′, [T(vvv2)]B′, . . . , [T(vvvn)]B′.
3. Hitung[vvv]B.
4. Hitung koordinat dariT(vvv) relatif terhadap basisB′ melalui
[T(vvv)]B′ = [T]B′
B [vvv]B =
c1
c2...
cm
.
5. MakaT(vvv) = c1www1+c2www2+ · · ·+cmwwwm .
Contoh 7.3.2Misalkan T : R2 → R3 adalah transformasi linier didefinisikanoleh
T(vvv) =
([xy
])
=
yx+yx−y
dan misalkan masing-masing
B=
{[12
]
,
[31
]}
dan B′ =
100
,
110
,
111
adalah basis terurut untukR2 danR3.
a. Dapatkan[T]B′
B .

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 163
b. Misalkanvvv=
[−3−2
]
. DapatkanT(vvv) secara langsung dan kemudian gunakan
matriks dari hasil (a).
Jawab
a. KenakanT pada vektor basis diB, didapat
T
([12
])
=
23−1
dan T
([31
])
=
142
.
Selanjutnya dapatkan masing-masing koordinat dari vektortersebut relatifterhadap basisB′. Yaitu mendapatkan skalar-skalar yang memenuhi
a1
100
+a2
110
+a3
111
=
23−1
dan
b1
100
+b2
110
+b3
111
=
142
.
Penyelesaian pada sistem perasamaa linier yang pertama adalah
a1 =−1,a2 = 4 dan a3 =−1
dan peyelesaian pada sistem perasamaa linier yang kedua adalah
b1 =−3,b2 = 2 dan b3 = 2.
Jadi
[T]B′
B =
−1 −34 2−1 2
b. Dengan menggunakan definisiT langsung, didapat
T
([−3−2
])
=
−2−3−2−3+2
=
−2−5−1
.

164
Berikutnya, untuk menggunakan matriks[T]B′
B pada bagian (a) diperlukan koor-dinat darivvv relatif terhadap basisB. Perhatikan bahwa, penyelesaian dari per-samaan
a1
[12
]
+a2
[31
]
=
[−3−2
]
adalah a1 =−35, a2 =−
45.
Jadi, vektor koordinat darivvv=
[−3−2
]
relatif terhadap basisB adalah
[vvv]B ==
[−3−2
]
B==
[−3
5−4
5
]
.
Selanjutnya dapat dihitungT menggunakan perkalian matriks sehingga didapat
[T(vvv)]B′ =
−1 −34 2−1 2
[−3
5−4
5
]
=
3−4−1
.
Jadi
T(vvv) = 3
100
−4
110
−
110
=
−2−5−1
terlihat hasilnya sama dengan hasil perhitungan langsung.
Contoh 7.3.3Didefinisikan suatu transformasi linierT : P2(R)→ P3(R) oleh
T(p(x)) = x2d2p(x)dx2 −2
dp(x)dx
+xp(x), ∀p(x) ∈ P2(R).
Dapatkan representasi matriksdariT relatif terhadap basi baku untukP2(R) danP3(R) .
Jawab Karena basis baku untukP2(R) adalahB= {1,x,x2}, maka pertama di-hitung
T(1) = x, T(x) = x2−2,T(x2) = x2(2)−2(2x)+x(x2) = x3+2x2−4x.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 165
Karena basis baku untukP3(R) adalahB′ = {1,x,x2,x3}, maka koordinat darivektorT(1),T(x),T(x2) relatif terhadap basisB′ adalah:
[T(1)]B′ =
0100
, [T(x)]B′ =
−2010
dan [T(x2)]B′ =
0−421
.
Jadi representasi matriks dariT relatif terhadap basisB danB′ adalah
[T]B′
B =
0 −2 01 0 −40 1 20 0 1
.
Sebagai suatu contoh, misalkanp(x) = x2−3x+1. Karenap′(x) = 2x−3 danp′′(x) = 2, maka didapat
T(p(x)) = x2(2)−2(2x−3)+x(x2−3x+1)
= x3−x2−3x+6.
Untuk menggunakan representasi matriks dariT relatif terhadap basisB′ diten-tukan dulu
[p(x)]B =
1−31
.
Sehingga koordinat dari image darip(x) oleh pemetaanT relatif terhadap basisB′ diberikan oleh
[T(p(x))]B′ = [T]B′
B [p(x)]B =
0 −2 01 0 −40 1 20 0 1
1−31
=
6−3−11
.
Sehingga didapatT(p(x)) = 6−3x−x2+x3,
hasil ini sesuai dengan penghitungan langsungT(p(x)).

166
Sebagai akibat dari beberapa pembahasan diberikan sebagaiberikut.
Akibat 7.3.1 MisalkanV danW adalah ruang vektor berdimensi hingga denganmsaing-masin basis terurutB danB′. Bila SdanT adalah transformasi linier dariV keW, maka 1.[S+T]B
′B = [S]B
′B +[T]B
′B
2. [kT]B′
B = k[T]B′
B , untuk sebarang skalark∈ K.
Akibat 7.3.2 MisalkanU,V danW adalah ruang vektor berdimensi hingga den-gan masing-msing basis terurutB,B′ danB′′. Bila T : U → V danS : V →Wadalah transformasi linier, maka
[S◦T]B′′
B = [S]B′′
B′ [T]B′B .
Kesimpulan 7.3.3MisalkanV adalah ruang vektor berdimensi hingga denganbasis tereurutB. Bila T adalah suatu operator linier padaV, maka
[Tn]B = ([T ]B)n.
Kesimpulan 7.3.4MisalkanT adalah suatu operator linier yang mempunyai in-vers pada suatu ruang vektorV berdimensi hingga danB adalah suatu basis teru-rut untukV. Maka
[T−1]B = ([T ]B)−1.
7.4 Similaritas
Sebagaimana telah dibahas bahwa bilaT : V → V adalah operator linier padaruang vektorV danB adalah suatu basis terurut untukV, makaT mempunyai

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 167
suatu representasi matriks relatif terhadap basisB. Matriks yang tertentu un-tuk T bergantung pada pilihan basis yang ditentutkan. Sebagai akibat matriksyang berkaitan dengan suatu transformasi linier tidak tunggal. Apapun hal ini,tindakan dari operatorT padaV tampa memperhatikan representasi matriks ter-tentu adalah selalu sama. Hal ini dijelaskan oleh contoh berikut.
Contoh 7.4.1MisalkanT : R2→ R2 adalah operator linier didefinisikan oleh
T
([xy
])
=
[x+y
−2x+4y
]
.
Juga, misalkan diberikan dua basis terurut untukR2 yaitu basis bakuB1= {eee1,eee2}danB2
{[11
]
,
[12
]}
. Selidiki bahwa tindakan pada vektorvvv=
[23
]
oleh operator
T adalah sama terhadap pilihan basisB1 ataupun basisB2 dari representasi ma-triks T yang digunakan.
Jawab Representasi matriks dariT relatif terhadap basisB1 dan B2 masing-masing adalah
[T]B1 =
[1 1−2 4
]
dan [T]B2 =
[2 00 3
]
.
Perhatikan bahwa
[vvv]B1 =
[23
]
dan [vvv]B2 =
[11
]
.
Gunakan representasi dari operatorT relatif masing-masing terhadap basisB1
danB2 didapat
[T(vvv)]B1 = [T]B1[vvv]B1 =
[1 1−2 4
][23
]
=
[58
]
dan
[T(vvv)]B2 = [T]B2[vvv]B2 =
[2 00 3
][11
]
=
[23
]
.
Untuk melihat hasil-hasil ini sama sebagai berikut:
T(vvv) = 5
[10
]
+8
[01
]
=
[58
]
danT(vvv) = 2
[11
]
+3
[12
]
=
[58
]
.

168
Teorema berikut memberikan hubungan diantara matriks-matriks untuk suatuoperator linier relatif terhadap dua basis yang berbeda.
Teorema 7.4.1MisalkanV adalah suatu ruang vektor berdimensi hingga,B1 danB2 adalah dua basis terurut yang berbeda untukV; danT :V →V adalah suatuoperator linier. MisalkanP= [I ]B1
B2adalah matriks transisi dariB2 keB1. Maka
[T]B2 = P−1[T]B1P.
Bukti Misalkanvvv sebarang vektorV, didapat
[T(vvv)]B2 = [T]B2[vvv]B2.
Cara lain untuk menghitung[Tvvv]B2 sebagai berikut: KarenaP adalah matrikstransisi dariB2 keB1, maka
[vvv]B1 = P[vvv]B2.
Jadi koordinat dariT(vvv) relatif terhadapB1 diberikan oleh
[T(vvv)]B1 = [T]B1[vvv]B1 = [T]B1P[vvv]B2.
Kedua ruas persamaan kalikan dari kiri denganP−1 yaitu merupakan matrikstransisi dariB1 keB2, didapat
P−1[T(vvv)]B1 = P−1[T]B1P[vvv]B2,
tetapiP−1[T(vvv)]B1 = [T(vvv)]B2. Jadi
[T(vvv)]B2 = P−1[T]B1P[vvv]B2. (7.5)
karena dalam Persamaan7.5berlaku untuk semua vektorvvv di V, maka
[T]B2 = P−1[T]B1P. (Lihat Gambar7.2)
Contoh 7.4.1Misalkan bahwaT,B1 dan B2 adalah operator linier dan basis-basis terurut sebagaimana dalam Contoh7.4.1. Maka
[T]B1 =
[1 1−2 4
]
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 169
[vvv]B1
[vvv]B2 [T(vvv)]B2
[T(vvv)B1
P P−1
[T]B1
[T]B2
Gambar 7.2: Diagram Perubahan Basis
Gunakan Teorema7.4.1untuk menyelidiki bahwa
[T]B2 =
[2 00 3
]
.
Jawab KarenaB1 adalah basis baku untukR2, maka matriks transisi dariB2 keB1 adalah
P= [I ]B1B2
=
[1 11 2
]
,
sehingga didapat
P−1 =
[2 −1−1 1
]
.
Jadi,
P−1[T]B1P=
[2 −1−1 1
][1 1−2 4
][1 11 2
]
=
[2 00 3
]
= [T]B2.
Contoh 7.4.2MisalkanT : R2→ R2 adalah operator linier didefinisikan oleh
T
([xy
])
=
[−x+2y3x+y
]
, ∀[xy
]
∈ R2.
Misalkan
B1 =
{[2−1
]
,
[10
]}
dan B2 =
{[1−1
]
,
[01
]}
adalah basis terurut untukR2. Dapatkan matriks dariT relatif terhadapB1 dangunakan Teorema7.4.1untuk mendapatkan matriks dariT relatif terhadapB2.
170
JawabKarena
T
([2−1
])
=
[−45
]
dan T
([10
])
=
[−13
]
,
didapat
[T]B1 =
[[−45
]
B1
[−13
]
B1
]
=
[−5 −36 5
]
.
matriks transisi dariB2 keB1 adalah
P= [I ]B1B2
=
[[1−1
]
B1
[−13
]
B1
]
=
[1 −1−1 2
]
Gunakan Teorema7.4.1didapat
[T]B2 = P−1[T]B1P=
[2 11 1
][−5 −36 5
][1 −1−1 2
]
=
[−3 2−1 3
]
.
Secara umum, bilaA dan B matriks persegi adalah representasi untuk opera-tor linier yang sama, maka kedua matriks tersebut dinamakansimilar . Den-gan menggunakan Teorema7.4.1dapat didefinisikan similaritas untuk matriks-matriks persegi tampa merujuk pada suatu operator linier.
Definisi 7.4.1MisalkanA danB matriks berukurann×n. Dikatakan bahwaAsimilar denganB bila ada suatu matriksP yang punya invers sedemikian hinggaB= P−1AP.
Pengertian dari similaritas menjelaskan suatu relasi diantara matriks persegi yangmempunyai sifat:
1. Similar dengan dirinya sendiriA= I−1AI untuk sebarang matriks persegiAdan matriks identitasI yang sesuai ukurannya.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 171
2. Simetri, BilaA similar denganB, makaB similar denganA. Sebab bilaB= P−1AP, makaA= PBP−1 = Q−1BQdimanaQ= P−1.
3. Transitif, BilaA similar denganB, danB similar denganC, makaA similardenganC. Sebab bilaB= P−1APdanC= Q−1BQmaka
C= Q−1(P−1AP)Q= (Q−1P−1)A(PQ) = (PQ)−1A(PQ) = R−1AR,
dimanaR= PQ. Terlihat bahwa similaritas diantara matriks-matriks adalahrelasiekivalen.
Pada pembahasan berikut ini digunakan notasiA= (T,B,B′) yang menyata-kan representasi matriks dariT, dimanaT : V →W adalah suatu transformasilinier denganV danW berdimensi hingga dan masing-masingB danB′ adalahbasis terurut untukV danW.
7.5 BENTUK NORMAL DIAGONAL SATUAN
Diberikan pemetaan linierT :V→W terhadap basis terurutB untuk ruang vektorV dan basis terurutB′ untuk ruang vektorW, bagaimana cara memilih basisterurutB untuk ruang vektorV dan basis terurutB′ untuk ruang vektorW supayarepresentasi matriksA = (T,B,B′) mempunyai bentuk normal diagonal satuanyang sederhana, yaitu matriks:
Ir... 0
. . . . . . . . .
0 ... 0
,
denganIr adalah matriks satuan berukuranr× r danr ≤min{dim(V),dim(W)}.Untuk memperoleh cara yang dimaksud ini digunakan sifat berikut.
SIFAT Misalkan pemetaan linierT :V →W, masing-masing dimensiV danWadalahm dann dengan dim(Im(T)) = r . Maka ada basis terurutB dari V danbasis terurutB′ dari W sehingga representasi matriks dariT berbentuk normal

172
diagonal satuan, yaitu
A= ( f ,B,C) =
Ir... 0
. . . . . . . . .
0 ... 0
l r
l n− r
←→ ←→r m− r
Bukti Dari sifat dimensi pemetaan linier didapat,
dim(N(T)) = dim(V)−dim(R(T)) = m− r.
Misalkanvvvr+1, . . . ,vvvm adalah suatu basis terurut dariN(T). Perluas basis inisampai diperoleh basis terurut
B= vvv1, . . . ,vvvr ,vvvr+1, . . . ,vvvm
dari ruang vektorV. Dari pengertian kernel didapat
T(vvvr+1) = 000W, . . . ,T(vvvm) = 000W.
Selanjutnya pilih vektor-vektor
www1, . . . ,wwwr ∈ R(T)
yang memenuhiT(vvv1) =www1, . . . ,T(vvvr) =wwwr .
Jelas bahwa vektor-vektorwww1, . . . ,wwwr adalah suatu basis terurut dariR(T). Se-lanjutnya perluas basis ini sampai diperoleh basis terurut
B′ =www1, . . . ,wwwr ,wwwr+1, . . . ,wwwn
dari ruang vektorW. Jadi, terhadap basis terurutB dari ruang vektorV dan basisterurutB′ dari ruang vektorW, pemetaanT didefinisikan oleh
T(vvv1) =www1, . . . ,T(vvvr) =wwwr ,T(vvvr+1) = 000W, . . . ,T(vvvm) = 000W.
Dari definisi ini terlihat bahwa representasi matriksA= (T,B,B′) adalah:
A= (T,B,C) =
Ir... 0
. . . . . . . . .
0 ... 0
l r
l n− r
←→ ←→r m− r
�

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 173
Contoh 7.5.1Misalkan representasi matriks dari suatu pemetaan linier terhadapbasis baku terurut, diberikan oleh:
A=
1 2 32 3 13 5 4
.
Dapatkan basis-basis terurut dariV danW supaya dengan basis-basis ini pemetaanlinier mempunyai representasi matriks berbentuk normal diagonal satuan.
Jawab Pertama, tentukan kernel dariA dengan menyelesaikan persamaanAxxx=000R3, didapat:
ker(A) ={
x(7,−5,1)′ |x∈ R
}
atauker(A) =
⟨{
(7,−5,1)′}⟩
.
Perluas basis dari kernel sehingga diperoleh basis terurut
B={
(1,0,0)′,(0,1,0)′,(7,−5,1)′}
.
Selanjutnya dapatkan basis terurut dari ImageA sebagai berikut:
1 2 32 3 13 5 4
100
=
123
,
1 2 32 3 13 5 4
010
=
235
.
Perluas basis terurut ini sehingga diperoleh:
B′ ={
(1,2,3)′,(2,3,5)
′,(1,0,0)
′}
adalah basis terurut dari ruang vektorW. Selanjutnya selidiki dengan basis-basis terurutB danB′, matriks representasi berbentuk normal diagonal satuansebagaimana berikut ini. Persamaan-persamaan yang memberikan matriks
P−1 = (T,B,B)
denganB basis terurut baku adalah:
IV(v1v1v1) = v1v1v1 = (1,0,0)′,
174
IV(v2) = v2v2v2 = (0,1,0)′
dan
IV(v3) = v3 = (7,−5,1)′.Sehingga didapat:
P−1 =
1 0 70 1 −50 0 1
.
Dengan cara serupa, persamaan-persamaan yang memberikan matriks Q−1 =
(T,B′,B) denganB′ basis terurut baku adalah:
IW(w1w1w1) = w1w1w1 = (1,2,3)′,IW(w2w2w2) = w2w2w2 = (2,3,5)′
dan
IW(w3w3w3) = w3w3w3 = (1,0,0)′.Sehingga didapat:
Q−1 =
1 2 12 3 03 5 0
⇒ Q=
0 5 −30 −3 21 1 −1
dan matriksA= QAP−1 diberikan oleh:
A=
0 5 −30 −3 21 1 −1
1 2 32 3 13 5 4
1 0 70 1 −50 0 1
=
1 0 00 1 00 0 0
.
7.6 Vektor-Karakteristik dan Ruang-Karakteristik Tergenar-alisir
MisalkanT : U→ U suatu pemetaan linier pada ruang vektorU berdimensinatas lapanganF. Bila uuu∈U danλ ∈ F memenuhiT(uuu) = λuuu, makauuu dinamakansuatu vektor-eigen dariT yang bersesuaian dengan nilai-eigenλ.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 175
MisalkanA suatu matriks ukurann× n dengan elemen-elemennya di suatulapanganF. Bila ada vektor tak nolxxx ∈ Fn dan skalarλ ∈ F yang memenuhiAxxx= λxxx, makaxxx dikatakan suatu vektor-eigen dari matriksA yang bersesuaiandengan nilai-eigenλ.
Misalkan matriksA = (T,B,B) adalah representasi dari pemetaan linierT :
U→ U terhadap basis terurutB dari ruang vektorU. Selanjutnya bilaρB adalahpemetaan koordinat dariU keFn, makaA= ρBTρ−1
B danxxx= ρB(uuu). Jadi
Axxx= λxxx ⇔ (ρBTρ−1B )(ρB(uuu)) = λρB(uuu)
⇔ ρB(T(uuu)) = ρB(λuuu)
⇔ T(uuu) = λuuu
Teorema 7.6.1Bila T :U→U suatu pemetaan linier dan masing masing matriksA = (T,B,B) danA = (T,B,B) adalah representasi dariT dengan basis terurutyang berbeda, maka nilai-eigen dariA sama dengan nilai-eigen dariA.
Bukti Misalkan P = (IU,B,B) matriks perubahan basis dari basisB ke basisB, makaA = PAP−1. Bila Axxx = λxxx didapat(PAP−1)(Pxxx) = λ(Pxxx). SehinggadiperolehAxxx= λxxx dimanaxxx= Pxxx. Terlihat bahwa matriksA danA mempunyainilai-eigen yang sama.
Cara Menghitung Nilai Eigen dan Vektor Eigen
MisalkanA suatu matriks berukurann× n danAxxx = λxxx denganxxx 6= 000 danxxx ∈Fn, maka(λI −A)xxx = 000, denganI adalah matriks identitas berukuran ukurann×n. Persamaan homogin(λI −A)xxx= 000 mempunyai jawab nontrivial bila danhanya bila det(λI −A) = 0. Persamaan det(λI −A) = 0 dinamakan persamaankharakteristik dari matriksA yang merupakan persamaan polinomial dalamλdengan derajadn.
Contoh 7.6.1Diberikan matriks
A=
[0 1−2 3
]
⇒ det(
[λ −12 λ−3
]
) = λ2−3λ+2= (λ−2)(λ−1).
176
Untuk λ = 2 didapat:[
2 −12 −1
][x1
x2
]
=
[00
]
⇒ x2 = 2x1⇒ xxx=
[12
]
,
sedangkan untukλ = 1 didapat:[
1 −12 −2
][x1
x2
]
=
[00
]
⇒ x1 = x2⇒ xxx=
[11
]
.
7.7 Pendiagonalan Matriks Persegi
Pendiagonalan matriks persegi merupakan suatu alat yang berguna bagi matriksyang bisa didiagonalkan dan banyak aplikasinya. Berikut ini diberikan sifat me-ngenai pendiagonalan suatu matriks persegi.
Teorema 7.7.1Suatu matriksA berukurann× n dengan elemen-elemen diFsimilar dengan matriks diagonal bila dan hanya bila eigenvektor-eigenvektornyamembentang ruangFn (spanFn).
Bukti Misalkanxxx1,xxx2, . . . ,xxxn adalah vektor-eigen dari matriksA dengan
〈xxx1,xxx2, . . . ,xxxn〉= Fn.
Jadi matriksQ= [xxx1 |xxx2 | . . . |xxxn]
mempunyai invers, misalkanQ−1 = P. Sehingga didapat
AQ = A[xxx1 |xxx2 | . . . |xxxn]
= [Axxx1 |Axxx2 | . . . |Axxxn]
= [λ1xxx1 |λ2xxx2 | . . . |λnxxxn]
= [xxx1 |xxx2 | . . . |xxxn]
λ1 . . . . . . 0... λ2 . . .
...... . . . ... ...0 . . . . . . λn
= QA⇔ A= Q−1AQ⇒ A= PAP−1.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 177
Contoh 7.7.1Selidiki apakah matriks dibawah ini bisa didiagonalkan!
A=
[0 1−2 3
]
Dalam pembahasan sebelum didapat bahwa
AX1 = λ1XXX1 danAXXX2 = λ2XXX2
dengan
λ1 = 2, XXX1 =
[12
]
danλ2 = 1, X2 =
[11
]
.
Untuk matriks
Q= [XXX1XXX2] =
[1 12 1
]
didapat
A= Q−1AQ=
[−1 12 −1
][0 1−2 3
][1 12 1
]
=
[2 00 1
]
.
Terlihat bahwa matriksA dapat didiagonalkan menjadi matriksA.
Teorema 7.7.2Bila matriksA berukurann× n mempunyain eigenvalue yangberbeda satu dengan yang lainnya, maka eigenvektor-eigenvektornya bebas li-nier.
Bukti Misalkanλ1,λ2, . . . ,λn adalah eigenvalue-eigenvalue yang berbeda satudengan yang lainnya danXXX1,XXX2, . . . ,XXXn adalah eigenvektor-eigenvektor. yangbersesuaian. Dengan menggunakan induksi dibuktikan bahwaeigenvektor eigen-vektor tsb. bebas linier. Misalkan bahwa
XXX1,XXX2, . . . ,XXXk
bebas linier dan untuk
a1XXX1+a2XXX2+ . . .+akXXXk+ak+1XXXk+1 = 000. (7.6)

178
Sehingga didapat
A(a1XXX1+a2XXX2+ . . .+akXXXk+ak+1XXXk+1) = 000
atau
a1λ1XXX1+a2λ2XXX2+ . . .+akλkXXXk+ak+1λk+1XXXk+1 = 000. (7.7)
Kalikan λk+1 pada Persamaan7.6 selanjutnya hasilnya kurangkan pada Per-samaan7.7didapat:
a1(λ1−λk+1)XXX1+a2(λ2−λk+1)XXX2+ . . .+ak(λk−λk+1)XXXk = 000.
KarenaXXX1, . . . ,XXXk bebas linier danλi 6= λ j ,∀i 6= j, maka haruslah
a1 = a2 = . . . = ak = 0
. Sehingga Persamaan7.6 menjadiak+1XXXk+1 = 000 dan karenaXXXk+1 6= 000, makaharuslahak+1 = 0. Terlihat bahwa bila dari kenyataan Persamaan7.6 menjadiak+1XXXk+1 = 000 dan karena dipenuhi maka berakibat
a1 = a2 = . . .= ak = ak+1 = 0,
hal ini menunjukkan bahwa vektor-vektor
XXX1,XXX1, . . . ,XXXk,XXXk+1
adalah bebas linier.
Kesimpulan 7.7.1Bila matriksA berukurann×n dengan elemen-elemen di la-panganF mempunyai eigenvalue-eigenvalue yang berbeda, maka matriks A da-pat didiagonalkan.
Bukti Dengan menggunakan dua hasil sebelumnya didapat bahwa, eigenvektor-eigenvektor yang bersesuaian dengan eigenvalue-eigenvalue merupakan vektor-vektor yang bebas linier. Sehingga vektor-vektor ini membentangkan keselu-ruhan ruangFn. Akibatnya matriksA dapat didiagonalkan.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 179
Contoh 7.7.2Diberikan matriks
A=
0 1 00 0 16 −11 6
.
Polinomial kharakteristikA adalah
p(λ) =
∣∣∣∣∣∣
λ −1 00 λ −1−6 11 λ−6
∣∣∣∣∣∣
= λ∣∣∣∣
λ −111 λ−6
∣∣∣∣+1
∣∣∣∣
0 −1−6 λ−6
∣∣∣∣
atau
p(λ) = λ(λ2−6λ)+11λ−6= λ3−6λ2+11λ−6= (λ−3)(λ−2)(λ−1).
Didapatλ1 = 3,λ2 = 2 danλ3 = 1. Sehingga didapat pasangan eigenvalue-eigenvektor:
λ1 = 3,XXX1 =
139
; λ2 = 2,XXX2 =
124
; λ3 = 1,XXX3 =
111
.
dan
Q= [XXX1 XXX2 XXX3] =
1 1 13 2 19 4 1
⇒Q−1 =
1 −32
12
−3 4 −13 −5
212
.
Matriks A = Q−1AQ adalah matriks diagonal dengan elemen-elemen diagonalλ1 = 3,λ2 = 2 danλ3 = 1.
MATRIKS INVARIAN
Suatu matriks persegi invarian adalah suatu sifat dari matriks yang tidak berubahbila matriks ditransformasi dengan suatu cara tertentu. Eigenvalue-eigenvaluedari suatu matriks adalah invarian dibawah suatu transformasi kesemilaran, be-gitu juga trace dan determinannya. (Trace suatu matriksA adalah jumlah keselu-
ruhan eleme-elemen diagonalnya:tr (A) =n∑
i=1ai,i).

180
Teorema 7.7.3Bila λ adalah eigenvalue dari matriksA, makaλ juga eigenvaluedari suatu matriksPAP−1
Bukti MisalkanAXXX = λXXX dan YYY = PXXX
denganP matriks yang punya invers, jadiXXX = P−1YYY. Sehingga didapat
A(P−1YYY) = λ(P−1YYY)⇒ (PAP−1)YYY = λYYY.
Terlihat bahwaλ juga eigenvalue dari matriksPAP−1.
Teorema 7.7.4Bila ABC adalah hasil kali matriks persegi, makatr (ABC) =tr (BCA).
Bukti
(ABC)i,l =n
∑k=1
(n
∑j=1
ai, jb j,kck,l
)
.
Didapat
tr (ABC) =n
∑i=1
(ABC)i,i =n
∑i=1
(n
∑k=1
(n
∑j=1
ai, jb j,kck,i
))
=n
∑j=1
(n
∑i=1
(n
∑k=1
b j,kck,iai, j
))
= tr (BCA).
Teorema 7.7.5Trace dan determinan dari suatu matriks persegi adalah invariandalam suatu tranformasi similar. Lagi pula bila matriksA dapat didiagonalkandengan eigenvalueλi, i = 1, . . . ,n, maka
tr (A) =n
∑i=1
λi dan det(A) =n
∏i=1
λi.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 181
Bukti Dari hasil sebelumnya,tr (PAP−1) = tr (P−1PA) = tr (A). Sehingga dida-pat
det(PAP−1) = det(P)det(A)det(P−1)
= det(A)(det(P)det(P−1))
= det(A)det(PP−1)
= det(A)det(I) = det(A).
Jelas bahwa bilaPAP−1 = A denganA matriks diagonal dengan elemen-elemendiagonalλi, i = 1, . . . ,n, maka
tr (A) =n
∑i=1
λi dan det(A) =n
∏i=1
λi.
Contoh 7.7.3Diberikan matriks matriks
A=
0 1 00 0 16 −11 6
⇒ λ1 = 3,λ2 = 2,λ3 = 1.
Sedangkan trace dari matriksA adalah
tr (A) = 0+0+6= 6λ1+λ2+λ3 = 3+2+1= 6
}
⇒ tr (A) = λ1+λ2+λ3.
Sehinggadidapat
det(A) = 6
∣∣∣∣
1 00 1
∣∣∣∣= 6
λ1λ2λ3 = 3(2)(1) = 6
⇒ det(A) = λ1λ2λ3.

182
MULTIPLISITAS GEOMETRI dan ALJABAR
Misalkanλ adalah suatu eigenvalue dari pemetaan linierT : U→ U. Himpunansemua eigenvektor-eigenvektor yang bersesuaian dengan eigenvalueλ besertavektor nol dinamakan ruang eigen (eigen space) dariU dinotasikan olehEλ(U).Ruang eigenEλ(U) adalah ruang bagian dari ruang vektorU, sebab merupakankernel dari pemetaan
(λIU−A).
Dimensi dari subruangEλ(U) dinamakanmultiplisitas geometridari λ dan ba-nyaknyaλ yang sama (kembar/rangkap) dinamakanmultiplisitas aljabardariλ.Misalkan multiplisitas geometri dariλ adalaha dan multiplisitas aljabar dariλadalahb, makaa≤ b
Contoh 7.7.4Diberikan matriks
A=
2 −1 −10 3 10 1 3
⇒ det(λI −A) = (λ−4) (λ−2)2.
Sehingga didapat
E4(R3) = ker(
2 1 10 1 −10 −1 1
) =
⟨
1−1−1
⟩
dan
E2(R3) = ker(
0 1 10 −1 −10 −1 −1
) =
⟨
100
,
01−1
⟩
.
Terlihat bahwa untukλ = 4 ataupunλ = 2, multiplisitas geometri = multiplisitasaljabar. Jadi matriksA dapat didiagonalkan.
Contoh 7.7.5Diberikan matriks
A=
2 1 00 2 00 0 4
⇒ det(λI −A) = (λ−4) (λ−2)2.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 183
Sehingga didapat
E4(R3) = ker(
2 −1 00 2 00 0 0
) =
⟨
001
⟩
dan
E2(R3) = ker(
0 −1 00 0 00 0 −2
) =
⟨
100
⟩
.
Terlihat bahwa untukλ = 4 multiplisitas geometri= multiplisitas aljabar, tetapiuntuk λ = 2 multiplisitas geometri< multiplisitas aljabar. Dengan demikianmatriksA tidak dapat didiagonalkan.
Teorema 7.7.6Bila det(λI −A) = λn+cn−1λn−1+ · · ·+c0 = p(λ), maka
An+cn−1An−1+ · · ·+c0I = 000.
Bukti Bila PAP−1=D dimana matriksD adalah matriks diagonal dengan elemen-elemen diagonalλi, i = 1, . . . ,n adalah eigenvalue-eigenvalue dari matriksA.Maka didapat :
An+cn−1An−1+ · · ·+c0 = P−1(Dn+cn−1Dn−1+ · · ·+c0I)P
= P−1
p(λ1) . . . 0... .. . ...0 . . . p(λn)
P
= P−1
0 . . . 0... ... ...0 . . . 0
P
= 000.
184
Contoh 7.7.6Diberikan matriks
A=
0 1 00 0 16 −11 6
⇒ det(λI −A) = λ3−6λ2+11λ−6.
Didapat matriksA3−6A2+11A−6I adalah:
6 −11 636 −60 25150 −239 90
−
0 0 636 −66 36216 −360 150
+
0 11 00 0 1166 −121 66
−
6 0 00 6 00 0 6
=
(6−6) (−11+11) (6−6)(36−36) (−60+66−6) (25−36+11)
(150−216+66) (−239+360−121) (90−150+66−6)
=
0 0 00 0 00 0 0
7.8 Orthogonal
MisalkanV suatu ruang vektor atas lapangan riilR. Hasil kali dalam riil (realinner product) juga dinamakan bilinier adalah fungsi dariV×V keR dinotasikanoleh〈u,v〉 yang memenuhi
, 〈r1uuu1+ r2uuu2,vvv〉= r1〈uuu1,vvv〉+ r2〈uuu2,vvv〉 danr1, r2 ∈ R (Linier).
, 〈uuu,vvv〉= 〈vvv,uuu〉 untuk semuauuu,vvv∈ V (Simetri).
, 〈uuu,uuu〉 ≥ 0 untuk semuauuu∈ V dan〈uuu,uuu〉 = 0 bila dan hanya bilauuu= 000 (semidefinit positip).

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 185
Bilaxxx= (x1, . . . ,xn)
′, yyy= (y1, . . . ,yn)′ ∈ Rn,
maka hasil kali dalam baku diberikan oleh
〈xxx,yyy〉 def=
n
∑i=1
xiyi
(juga dinamakan dot product dalam geometri Euclide). Bila vektor-vektorxxx danyyy disajikan dalam vektor kolom, maka
〈xxx,yyy〉= xxx′yyy.
Suatunorm dari ruang vektorV ke lapangan riilR adalah suatu fungsi dino-tasikan oleh‖ · ‖ yang memenuhi
2� ‖vvv‖ ≥ 0 untuk semuavvv ∈ V dan‖vvv‖ = 0 bila dan hanya bilauuu = 000 (Definitpositip).
2� ‖rvvv‖= |r |‖vvv‖ untuk semuavvv∈ V, r ∈ R
2� ‖uuu+vvv‖ ≤ ‖uuu‖+‖vvv‖ untuk semuauuu,vvv∈ V (Pertaksamaan segitiga).
NORM EUCLIDE
Untuk setiapuuu∈ Rn norm Euclide diberikan oleh
‖uuu‖pdef=
(n
∑i=1|ui|p
) 1p
dalam hal ini dinamakan norm-p. Khusus untukp= 2 cukup ditulis
‖uuu‖=(
n
∑i=1|ui|2
)12
MisalkanV suatu ruang vektor atas lapanganR.
- Dua vektoruuu,vvv∈ V dikatakanorthogonalbila 〈uuu,vvv〉= 0.

186
- Suatu himpunan dari vektor-vektor adalahorthogonalbila setiap dua pasangvektor orthogonal.
- Suatu vektoruuu∈ V adalahternormalisir bila ‖uuu‖ = 1.
- Dua vektoruuu,vvv∈ V dikatakanorthonormalbila
‖uuu‖= ‖vvv‖= 1 dan 〈uuu,vvv〉= 0.
Setiap vektoruuu∈ V bisa dinormalisir kedalam bentukuuu‖uuu‖ .
Contoh 7.8.1Himpunan vektor-vektor{(1,0)′,(0,1)′
}
adalah orthonormal, tetapi{(1,1)′,(−1,1)′
}
adalah orthogonal. Himpunan yang terakhir ini dapat dijadikan orthonormal se-bagai mana himpunan berikut ini
{(1√2,
1√2
)′,
(
−1√2,
1√2
)′}.
Perhatikan bahwa normuuu= (x,y)′ diberikan oleh:
‖uuu‖=√
xx∗+yy∗
dimanax∗ adalah konjuget darix bila x adalah bilangan kompleks. Suatu basisorthonormal dari suatu ruang vektor mempunyai beberapa kemanfaatan dan basisbaku dari ruang vektorRn adalah orthonormal, yaitu basis baku dari ruang vektorR3 adalah himpunan
{(1,0,0)′,(0,1,0)′,(0,0,1)′
}.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 187
Diberikan matriksA berukurann× n, matriksA dikatakan matriks simetri bilaA = A′ dan dikatakan anti-simetri (skew-symmetric) bilaA = −A′. Matrikssimetri bermaanfaat dalam bentuk kuadrat, misalnya
[x y
][
a1,1 a1,2
a1,2 a2,2
][xy
]
= a1,1x2+2a1,2xy+a2,2y2
Masalah bentuk kuadrat akan dibahas pada pembahasan mendatang. Berikut inidiberikan dua sifat penting dari matriks simetri yang sangat berguna pada pem-bahasan mendatang, khususnya pada pembahasan masalah dekomposisi spektral,faktorisasiQRdan dekomposisi nilai singular.
Teorema 7.8.1Bila matriksA simetri dengan elemen-elemen riil dan berlaku
Axxx= λxxx
denganxxx 6= 000, makaλ selalu merupakan bilangan riil.
Bukti Digunakan tanda∗ untuk menyatakan komplek sekawan (complex conju-gate). Kedua ruas dari
Axxx= λxxx
kalikan denganxxx∗′didapat
xxx∗′Axxx= λ(xxx∗
′xxx). (7.8)
Persamaan7.8kedua ruas ditranspose-konjuget didapat
xxx∗′Axxx= λ∗(xxx∗
′xxx). (7.9)
Persamaan7.9dikurangi Persamaan7.8didapat
0= (λ∗−λ)(xxx∗′xxx)⇒ 0= λ∗−λ (sebabxxx 6= 000).
Jadiλ∗ = λ, maka dari ituλ adalah bilangan riil.
Teorema 7.8.2MisalkanA matriks simetri berukurann×n dengan elemen-ele-men riil. Bila λ danµ adalah sebarang dua eigenvalue dari matriksA denganmasing-masing eigenvektor adalahxxx danyyy danλ 6= µ, maka〈xxx,yyy〉= 0.

188
Bukti Kedua ruas persamaan
Axxx= λxxx kalikan dengan yyy′
didapatyyy′Axxx= λ(yyy′xxx). (7.10)
Kedua ruas persamaan
Ayyy= µyyy kalikan dengan xxx′
didapatxxx′Ayyy= µ(xxx′yyy). (7.11)
Kedua ruas Persamaan7.11ditranspose didapat
yyy′Axxx= µ(yyy′xxx). (7.12)
Persamaan7.12dikurangi Persamaan7.10didapat
0= (µ−λ)(yyy′xxx)⇒ 0= yyy′xxx= 〈xxx,yyy〉 (sebabλ 6= µ).
Contoh 7.8.2Diberikan matriks simetri
A=
6 −2 −1−2 6 −1−1 −1 5
.
Nilai eigen dariA didapat dari polininomial karakteristik matriksA yaitu p(λ)dengan menyelesaikan det(λ I −A) = 0, didapat
p(λ) = λ3−17λ2+90λ−144
= (λ−8) (λ−6) (λ−3) .
Terlihat bahwa nilai-eigen dariA berbeda, yaituλ1 = 8, λ2 = 6 danλ3 = 3.Vektor-eigen dariA yang bersesuaian dengan nilai-eigen adalah:
λ1 = 8 ⇒ v1v1v1 =
−110
,λ2 = 6 ⇒ v2v2v2 =
−1−12
, λ3 = 3 ⇒ v3v3v3 =
111
dan〈v1,v2v1,v2v1,v2〉= 0, 〈v1,v3v1,v3v1,v3〉= 0 dan 〈v2,v3v2,v3v2,v3〉= 0 .
Terlihat bahwa vektor-vektorv1,v2,v2v1,v2,v2v1,v2,v2 saling orthogonal.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 189
MATRIKS ORTHOGONAL
Matriks A berukurann×n dikatakanorthogonalbila AA′ = I = A′A yaitu
A−1 = A′.
Teorema 7.8.3Bila Bi danK j masing-masing menyatakan baris ke-i dan kolomke-j dari suatu matriks orthogonalA berukurann×n, maka
{Bi, i = 1, . . . ,n} dan {K j , j = 1, . . . ,n}
adalah himpunan dari vektor-vektor orthonormal.
Bukti Dari elemen perkalian matriks(AA′)i, j =⟨Bi,B j
⟩dan faktaAA′ = I dida-
pat⟨Bi,B j
⟩=
{1 i = j0 yang lainnya,
terlihat bahwa baris-baris dariA adalah orthonormal. BilaA orthogonal, makaA′ juga orthogonal, jadi kolom-kolom dariA juga orthonormal.
Contoh 7.8.3Bila matriksA diberikan oleh
A=
0 1 00 0 11 0 0
,
maka
AA′ =
0 1 00 0 11 0 0
0 0 11 0 00 1 0
=
1 0 00 1 00 0 1
= I
. Juga dapat dicek bahwaA′A= I . JadiA adalah matriks orthogonal.

190
Contoh 7.8.4Bila matriksA diberikan oleh
A=
0 − 1√2
1√2
1 0 00 1√
21√2
,
maka
AA′ =
0 − 1√2
1√2
1 0 00 1√
21√2
0 1 0− 1√
20 1√
21√2
0 1√2
=
1 0 00 1 00 0 1
= I .
Juga dapat dicek bahwaA′A= I . JadiA adalah matriks orthogonal.
Teorema 7.8.4Suatu pemetaan linier yang direpresentasikan oleh suatu matriksorthogonal adalah mempertahankan jarak dari suatu vektor,yaitu bila A suatumatriks orthogonal, maka‖Axxx‖ = ‖x‖ untuk semuaxxx∈ Rn.
Bukti Dari persamaan
‖xxx‖ =√
〈xxx,xxx〉 dan 〈xxx,xxx〉= xxx′xxx,
didapat‖xxx‖2 = xxx′xxx.
Oleh karena itu
‖Axxx‖2 = xxx′A′Axxx= xxx′xxx= ‖xxx‖2 ⇒ ‖Axxx‖ = ‖xxx‖.
Contoh 7.8.5Diberikan matriks orthogonal
A=
0 −1√2
1√2
1 0 0
01√2
1√2
dan sebarangxxx=
x1
x2
x3
∈ Rn,
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 191
maka dapat ditunjukkan bahwa‖Axxx‖= ‖xxx‖ sebagai mana berikut ini:∣∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣∣
0 −1√2
1√2
1 0 0
01√2
1√2
x1
x2
x3
∣∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣∣
−1√2
x2+1√2
x3
x11√2
x2+1√2
x3
∣∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣∣
=
√
(−1√2
x2+1√2
x3)2+x21+(
1√2
x2+1√2
x3)2 =
√
12
x22−x2x3+
12
x23+x2
1+12
x22+x2x3+
12
x23
√
x21+x2
2+x23 = ‖xxx‖.
KOMENTAR:
Karena matriksA mempunyai eigenvalue-eigenvalue yang berbeda, maka dapatdidiagonalkan menjadi matriks
Q−1AQ
dengan matriks
Q= [xxx1|xxx2| . . . |xxxn] dengan xxxi, i = 1, . . . ,n
adalah eigenvektor-eigenvektor dariAyang sesuai dengan eigenvaluenya. Berdasarkanhasil sebelumnya vektor-vektor
xxxi, i = 1, . . . ,n
saling orthogonal. Bila vektor-vektor ini dinormalkan maka didapat matriks or-thogonal
P=
[xxx1
‖xxx1‖
∣∣∣∣
xxx2
‖xxx2‖
∣∣∣∣. . .
∣∣∣∣
xxxn
‖xxxn‖
]
,
dengan demikian matriksP′AP juga matriks diagonal.

192
Contoh 7.8.6Diberikan matriks simetri
A=
[1√
2√2 2
]
⇒∣∣∣∣
[λ 00 λ
]
−
[1√
2√2 2
]∣∣∣∣=
∣∣∣∣
[λ−1 −
√2
−√
2 λ−2
]∣∣∣∣.
Sehingga didapat polinomial kharakteristik dari matriksA adalah
p(λ) = (λ−1)(λ−2)−2= λ2−3λ = λ(λ−3).
Untuk eigenvalueλ1 = 0 danλ2 = 3 didapat masing-masing eigenvektor yangsesuai adalah:
xxx1 =
[−√
21
]
dan xxx2 =
[1√2
]
.
Sehingga diperoleh
xxx1
‖xxx1‖=
−
√2√3
1√3
danxxx2
‖xxx2‖=
1√3
√2√3
.
Bila matriks
P=
[xxx1
‖xxx1‖xxx2
‖xxx2‖
]
,
maka pendiagonalan dari matriksA adalahP′AP dan hasilnya diberikan sebagai
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 193
berikut
−
√2√3
1√3
1√3
√2√3
[1√
2√2 2
]
−
√2√3
1√3
1√3
√2√3
=
−
√2√3
+
√2√3
−2√3
+2√3
1√3
+2√3
√2√3
+2√
2√3
−
√2√3
1√3
1√3
√2√3
=
0 0
3√3
3√
2√3
−
√2√3
1√3
1√3
√2√3
=
[0 00 3
]
CATATAN:
Berkaitan dengan matriks simetri dengan elemen-elemen riil. Sebagaimana telahdiketahui matriks simetri pasti semua eigenvaluenya adalah riil, tetapi tidak men-jamin bahwa semua eigenvalue-eigenvalue ini berbeda satu dengan yang lainnya,bila semuanya berbeda maka pasti matriks simetri ini bisa didiagonalkan.
Bila ada yang rangkap, maka hal ini ada dua kasus. Yang pertama bila masing-masing multiplisitas geometri = multiplisitas aljabar, maka pendiagonalan ma-triks bisa dilakukan. Kedua, bila masing-masing multiplisitas geometri< multi-plisitas aljabar, maka pendiagonalan tidak dapat dilakukan.
Pada khasus yang kedua tentunya hanya beberapa eigenvektoryang orthogo-nal satu dengan yang lainnya, yaitu yang berkaitan dengan eigenvalue-eigenvalueyang saling berbeda satu dengan lainnya. Tetapi untuk eigenvalue yang rangkap

194
walaupun memberikan eigenvektor-eigenvektor yang salingbebas linier tetapitidak menjamin bahwa eigenvektor-eigenvektor ini orthogonal. Oleh karena itumatriks yang kolom-kolomnya merupakan eigenvektor-eigenvektor bukan ma-triks orthogonal. Tetapi dengan beberapa modifikasi matriks tsb. bisa dijadikanmatriks orthogonal, cara pengorthogonalan ini mengarah apa yang dinamakanprosesPengorthogonalan Gram-Schmidt. Contoh berikut memberikan keje-lasan mengenai pengorthogonalan suatu matriks.
Contoh 7.8.7Diberikan suatu matriks simetri
A=
1 −1 −1−1 1 −1−1 −1 1
⇒ λI −A=
λ−1 1 11 λ−1 11 1 λ−1
.
Polinomial kharakteristik dariA diberikan oleh
p(λ) = det(λI −A) = (λ−2)2(λ+1).
Pasangan eigenvalue eigenvektor diberikan oleh
λ1 = 2,x1x1x1 =
10−1
; λ2 = 2,x2x2x2 =
01−1
; λ3 =−1,x3x3x3 =
111
.
Terlihat bahwa〈xxx1,xxx3〉= 〈xxx2,xxx3〉= 0 tetapi〈xxx1,xxx2〉= 1 6= 0. Penormalan darixxx2
danxxx3 didapat :
ppp2 =xxx2
‖xxx2‖=
012
√2
−12
√2
dan ppp3 =xxx3
‖xxx3‖=
13
√3
13
√3
13
√3
.
Untuk memperoleh suatu vektor ¯x1x1x1 supaya〈x1x1x1,xxx2〉 = 0, sebagai berikut. Mis-alkanx1x1x1+axxx2 = xxx1, didapat
xxx′2x1x1x1+axxx′2xxx2 = xxx′2xxx1
atau
〈x1x1x1,xxx2〉+a〈xxx2,xxx2〉= 〈xxx1,xxx2〉 ⇒ a=〈xxx1,xxx2〉〈xxx2,xxx2〉
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 195
Sehingga didapat
x1x1x1 = xxx1−〈xxx1,xxx2〉〈xxx2,xxx2〉
xxx2.
Jadi
x1x1x1 =
10−1
−12
01−1
=
1−1
2−1
2
.
Dengan menormalkan vektor ¯x1x1x1 didapat:
ppp1 =x1x1x1
‖x1x1x1‖=
13
√32
−13
√32
−13
√32
.
Jadi matriksP= [ppp1 |ppp2 |ppp3] diberikan oleh:
P=
23
√32 0 1
3
√3
−13
√32
12
√2 1
3
√3
13
√32 −1
2
√2 1
3
√3
⇒ P′P= I = PP′ (P matriks orthogonal).
Sehingga didapat :
P′AP=
23
√32 −
13
√32
13
√33
0 12
√2 −1
2
√2
13
√3 1
3
√3 1
3
√3
1 −1 −1−1 1 −1−1 −1 1
23
√32 0 1
3
√3
−13
√32
12
√2 1
3
√3
13
√32 −1
2
√2 1
3
√3
=
2 0 00 2 00 0 −1
196
7.9 PROSES ORTHOGONAL GRAM-SCHMIDT
Dalam bagian ini dibahas proses pengorthogonalan dariGRAM-SCHMIDT .Diberikan himpunan vektor-vektor yang bebas linier
S= {XXX1,XXX2, . . . ,XXXn},
dariSdibentuk himpunan vektor-vektor orthormal
T = {TTT1,TTT2, . . . ,TTTn}
sebagi berikut:
ttt1 =XXX1⇒TTT1 =ttt1
‖ttt1‖
ttt2 =XXX2−〈XXX2,XXX1〉〈XXX1,XXX1〉
ttt1⇒TTT2 =ttt2
‖ttt2‖......
tttn=XXXn−〈XXXn,ttt1〉〈ttt1,ttt1〉
ttt1−〈XXXn,ttt2〉〈ttt2,ttt2〉
ttt2− . . .−〈XXXn,tttn−1〉〈tttn−1,tttn−1〉
tttn−1⇒TTTn=tttn
‖tttn‖Didapat matriks orthogonal
T = [TTT1 |TTT2 | . . . |TTTn] .
Contoh 7.9.1Diberikan matriks dengan kolom-kolom merupakan vektor-vektoryang bebas linier, yaitu
A=
1 1 10 1 10 0 1
MisalkanXXX1,XXX2 danXXX3 adalah vektor-vektor kolom dariA, maka
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 197
ttt1 =XXX1 =
100
⇒TTT1 =ttt1
‖ttt1‖=
100
ttt2 =
110
−〈XXX2,ttt1〉〈ttt1,ttt1〉
ttt1 =
010
⇒TTT2 =ttt2
‖ttt2‖=
010
ttt3 =
111
−〈XXX3,ttt1〉〈ttt1,ttt1〉
ttt1−〈XXX3,ttt2〉〈ttt2,ttt2〉
ttt2 =
001
⇒TTT3 =ttt3
‖ttt3‖=
001
Terlihat bahwa matriksT = [TTT1 TTT2 TTT3] adalah matriks orthogonal.
PROYEKSI dan GENERAL INVERS
Proses orthogonal Gram-Schmid erat kaitannya dengan apa yang dinamakanproyeksi sebagaimana akan terlihat dalam pembahasan berikut ini. Ada kalanyasistem persamaan linierAxxx = yyy tidak mempunyai penyelesaian secara analitik(eksak). Tetapi bila model linier yang dikaji ini merupakansuatu problem nyatayang dijumpai, maka diperlukan suatu alternatif penyelesaian untuk menjawabproblem yang ada sehingga penyelesaian yang didapat cukup untuk menjawabproblem. Suatu contoh berikut menjelaskan hal ini: Diberikan sistem persamaanlinier Axxx= yyy:
[6 32 1
][x1
x2
]
=
[22
]
. (7.13)
Jawab eksak dari persamaan ini tidak ada. Dalam hal ini, selalu bisa dida-pat penyelesaian pendekatanxxx melalui penggantianyyy dengan vektor ˆyyy di ruangkolom dalamA yang dekat denganyyy dan sebagi penggantinya selesaikan per-samaanAxxx= yyy.
Untuk kasus yang diberikan dalam Persamaan7.13ruang kolom dariA adalahspan
W =
{
r
[31
]∣∣∣∣r ∈ R
}
.
Dengan demikian dipilih ˆyyy= r
[31
]
sehingga panjang
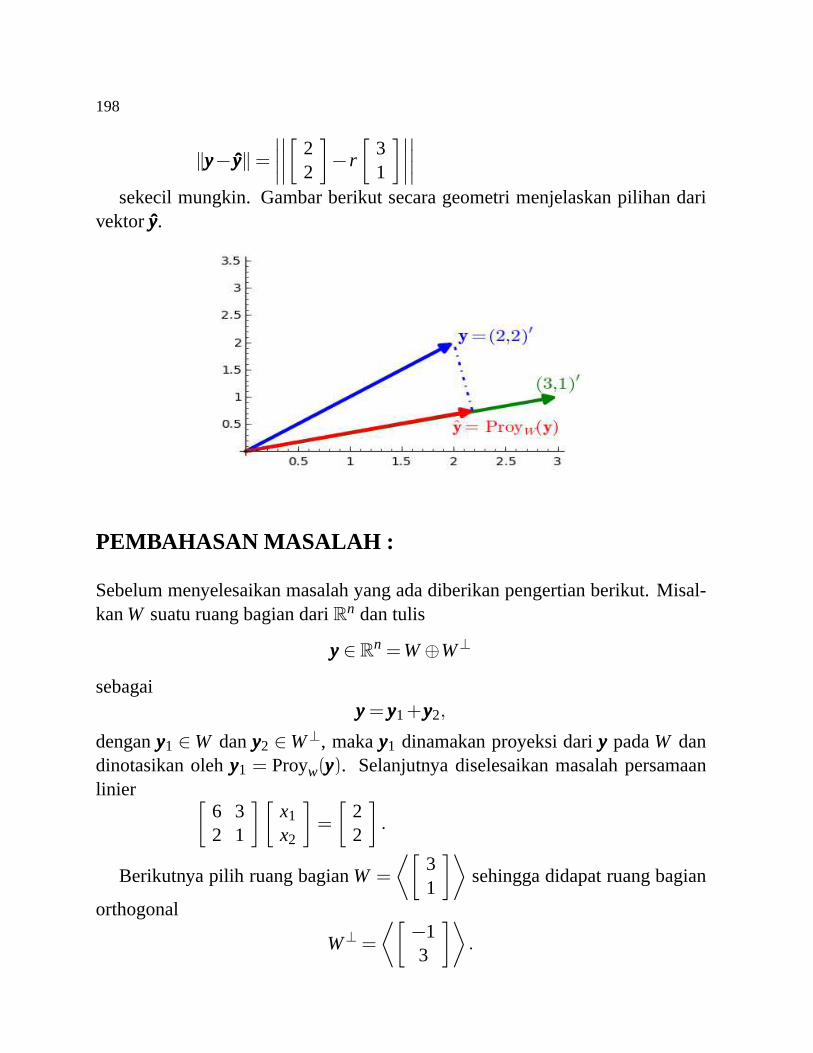
198
‖yyy− yyy‖=∣∣∣∣
∣∣∣∣
[22
]
− r
[31
]∣∣∣∣
∣∣∣∣
sekecil mungkin. Gambar berikut secara geometri menjelaskan pilihan darivektoryyy.
PEMBAHASAN MASALAH :
Sebelum menyelesaikan masalah yang ada diberikan pengertian berikut. Misal-kanW suatu ruang bagian dariRn dan tulis
yyy∈ Rn =W⊕W⊥
sebagaiyyy= yyy1+yyy2,
denganyyy1 ∈W danyyy2 ∈W⊥, makayyy1 dinamakan proyeksi dariyyy padaW dandinotasikan olehyyy1 = Proyw(yyy). Selanjutnya diselesaikan masalah persamaanlinier
[6 32 1
][x1
x2
]
=
[22
]
.
Berikutnya pilih ruang bagianW =
⟨[31
]⟩
sehingga didapat ruang bagian
orthogonal
W⊥ =
⟨[−13
]⟩
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 199
Jadi[
22
]
=45
[31
]
+25
[−13
]
.
Untuk meminimumkan panjang
‖yyy− yyy‖ =
∥∥∥∥
[22
]
− r
[31
]∥∥∥∥
=
∥∥∥∥
45
[31
]
+25
[−13
]
− r
[31
]∥∥∥∥
=
∥∥∥∥(45− r)
[31
]
+25
[−13
]∥∥∥∥,
dan karena
[31
]
dan
[−13
]
orthogonal, maka haruslahr =45
. Dengan demikian
didapat
yyy′ = Proyw
[22
]
=45
[31
]
= 0
[62
]
+45
[31
]
.
Terlihat bahwa penyelesaian pendekatan adalahx1 = 0 danx2 =45
.
Teorema 7.9.1MisalkanW suatu ruang bagian dariRn, maka vektor ˆyyy∈W yangdekat keyyy∈ Rn adalahyyy′ = Proyw(yyy).
Bukti Tulis yyy= yyy1+yyy2 denganyyy1 ∈W danyyy2 ∈W⊥. Jadiyyy1 = Proywww(yyy). Untuksebarangwww∈W jarak kuadrat‖yyy−www‖2 diberikan oleh
‖(yyy1−www)+yyy2‖2 = < (yyy1−www)+yyy2,(yyy1−www)+yyy2 >
= < yyy1−www,yyy1−www>+< yyy2,yyy2 >
= ‖yyy1−www‖2+‖yyy2‖2,
akan minimal bilawww= yyy1 = Proywww(yyy).

200
LANGKAH-LANGKAH MENDAPATKAN PROYEKSI
Suatu cara singkat untuk menentukan proyeksi dari suatu rauang bagianW yangdibangun hanya oleh satu vektorwww, denganV =W⊕W⊥ diberikan oleh
Proywww(yyy) =< yyy,www>
<www,www>www. (7.14)
Dalam hal ini adalah:
1.< yyy,www>
<www,www>www∈W.
2. yyy−< yyy,www>
<www,www>www∈W⊥
3. yyy=< yyy,www>
<www,www>www+
(
yyy−< yyy,www>
<www,www>www
)
Persoalan sebelumnya dapat diselesaikan menggunakan hasil dalam (7.14) dida-pat
Proywww
(22
)
=2.3+2.13.3+1.1
(31
)
=45
(31
)
.
Teorema 7.9.2MisalkanW suatu ruang bagian dariRn dibangun oleh basis or-thogonal
www1, . . . ,wwwk
dan misalkanyyy∈ Rn, maka
Proywww(yyy) =〈yyy,www1〉〈www1,www1〉
www1+ . . .+〈yyy,wwwk〉〈wwwk,wwwk〉
wwwk. (7.15)
Bukti Misalkan
yyy1 =〈yyy,www1〉〈www1,www1〉
www1+ . . .+〈yyy,wwwk〉〈wwwk,wwwk〉
wwwk.
Maka untuk 1≤ i ≤ k didapat
〈yyy−yyy1,wwwi〉= 〈yyy,wwwi〉−〈yyy,wwwi〉〈wwwi,wwwi〉
〈wwwi,wwwi〉= 0.
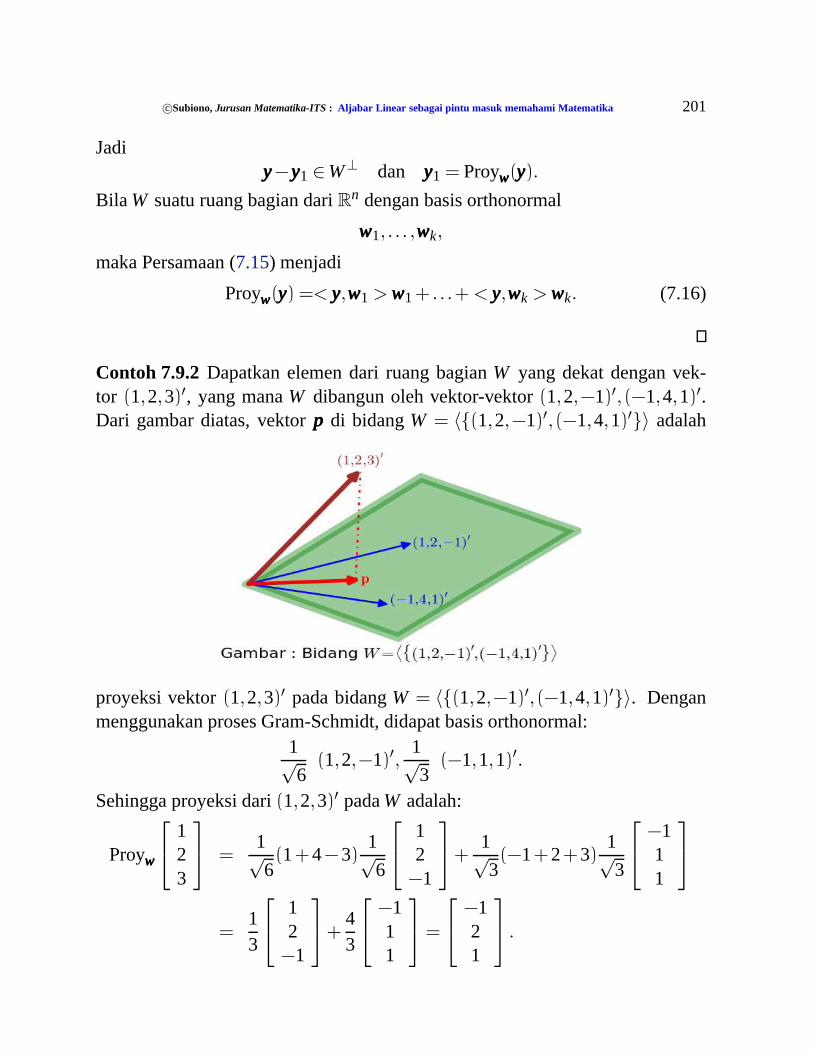
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 201
Jadiyyy−yyy1 ∈W⊥ dan yyy1 = Proywww(yyy).
Bila W suatu ruang bagian dariRn dengan basis orthonormal
www1, . . . ,wwwk,
maka Persamaan (7.15) menjadi
Proywww(yyy) =< yyy,www1 >www1+ . . .+< yyy,wwwk >wwwk. (7.16)
Contoh 7.9.2Dapatkan elemen dari ruang bagianW yang dekat dengan vek-tor (1,2,3)′, yang manaW dibangun oleh vektor-vektor(1,2,−1)′,(−1,4,1)′.Dari gambar diatas, vektorppp di bidangW = 〈{(1,2,−1)′,(−1,4,1)′}〉 adalah
proyeksi vektor(1,2,3)′ pada bidangW = 〈{(1,2,−1)′,(−1,4,1)′}〉. Denganmenggunakan proses Gram-Schmidt, didapat basis orthonormal:
1√6
(1,2,−1)′,1√3
(−1,1,1)′.
Sehingga proyeksi dari(1,2,3)′ padaW adalah:
Proywww
123
=1√6(1+4−3)
1√6
12−1
+1√3(−1+2+3)
1√3
−111
=13
12−1
+43
−111
=
−121
.
202
Sehingga didapat vektor
123
=
−121
+
202
∈W⊕W⊥,
elemen dariW dekat ke
123
adalah Proywww
123
=
−121
.
Contoh 7.9.3Misalkan dipunyai suatu supply dari 5000 unitS, 4000 unitT dan2000 unitU . Bahan digunakan dalam pabrik untuk memproduksiP danQ. Bilasetiap unit dariP menggunakan 2 unitS, 0 unit T dan 0 unitU ; dan setiap unitdariQ menggunakan 3 unitS , 4 unitT dan 1 unitU . Berapa banyak unitp dariP danq dariQ yang harus dibuat supaya keseluruhan supply digunakan?
JawabModel matematika dari persoalan yang ada diberikan oleh persamaan:
2 30 40 1
[pq
]
=
500040002000
.
Persamaan dari model tidak mempunyai jawab eksak (analitik) sebab vektor
500040002000
bukan merupakan kombinasi linier dari vektor- vektor
200
dan
341
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 203
Untuk meyelesaikan persamaan secara pendekatan, dilakukan hal berikut: Carivektor didalam ruang bagianW yang merupakan bentuk kombinasi linier
p
200
+q
341
yang dekat dengan vektor
500040002000
Dengan melakukan proses Gram-Schmidt di vektor-vektor pembangun yang meru-pakan basis dariW, didapat basis orthonormal:
www1 =
100
,www2 =1√17
041
.
Sehingga diperoleh:
Proywww
500040002000
= 5000
100
+(16000√
17+
2000√17
)1√17
041
= 5000
100
+18000
17
041
= (2500−(32)(
1800017
))
200
+18000
17
341
.
Terlihat bahwap= 2500−(32)(
1800017
) = 911.76 danq=18000
17= 1058.82.
PENGGUNAAN GENERAL INVERS dan PSEDO INVERS
Untuk setiap matriksA berukuranm×n dengan elemen-elemen riil, matriksA−
berukurann×n dinamakan pendekatan invers (psedoinverse) yang memenuhi

204
A−yyy adalah penyelesaian pendekatan dari persamaanAxxx= yyy. Kolom-kolom darimatriksA− adalah penyelesaian pendekatan dariAxxx= eeei, denganeeei, i = 1, . . . ,madalah basis baku dariRm.
Contoh 7.9.4Dapatkan matriksA− bila
A=
2 30 40 1
dan hitung
A−
500040002000
.
JawabRuang kolom orthonormal dari matriksA adalah span dari vektor-vektor:
www1 =
100
,www2 =1√17
041
.
Sehingga didapat
Proywww
100
=
100
,Proywww
010
=
01617417
,Proywww
001
=
0417117
.
Dan kolom-kolom matriksA− didapat sebagai berikut
2 30 40 1
xxx=
100
⇒ xxx=
[ 120
]
2 30 40 1
xxx =
01617417
⇒ xxx=
[−16
17417
]
2 30 40 1
xxx =
0417117
⇒ xxx=
[− 3
34117
]
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 205
Dengan demikian didapat matriksA− adalah:
A− =
[ 12 − 6
17 − 334
0 417
117
]
.
Penyelesaian pendekatan dari persamaan
2 30 40 1
(pq
)
=
500040002000
diberikan oleh
[pq
]
= A−
500040002000
=
[ 12 − 6
17 − 334
0 417
117
]
500040002000
=
[911.761058.82
]
.
Hasil yang didapat sama dengan hasil perhitungan sebelumnya.
Contoh 7.9.5Dengan general invers cari garis lurusy = ax+ b yang palingmendekati titik
(1,2),(2,3) dan(3,1).
Jawab
1 12 13 1
[ab
]
=
231
⇒ A− =
[1 2 31 1 1
]
1 12 13 1
−1[
1 2 31 1 1
]
A−
231
=
{[ 12 −1−1 7
3
][1 2 31 1 1
]}
231
=
[−1
2 0 12
43
13 −2
3
]
231
Didapata=−1+ 12 =−1
2 danb= 83 +1− 2
3 = 3.
Contoh 7.9.6Dengan general invers dapatkan parabolay = ax2+ bx+ c yangmendekati titik-titik
(3,0),(2,0),(1,2),(−1,12).

206
Jelaskan apakah hasilnya pendekatan atau tidak!
JawabUntuk titik(3,0),(2,0),(1,2),(−1,12)
didapat empat persamaan :
9a+3b+c= 0, 4a+2a+c= 0, a+b+c= 2, a−b+c= 12
atau dalam bentuk persamaan matriks
9 3 14 2 11 1 11 −1 1
abc
=
00212
.
Sehingga didapat
abc
=
9 4 1 13 2 1 −11 1 1 1
9 3 14 2 11 1 11 −1 1
−1
9 4 1 13 2 1 −11 1 1 1
00212
=
1−56
.
Cek hasilnya:
9 3 14 2 11 1 11 −1 1
1−56
=
00212
.
Terlihat, hasilnya eksak bukan pendekatan.
Catatan dan Komentar Psedo dan General Invers
- Psedo invers dan General Invers secara umum berbeda. Umumnya Psedoinvers matrix berukuranm×n, sedangkan General invers matriks persegi.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 207
- Misalkan matriksA berukuranm×n. Bila kolom-kolom dariA bebas linear,maka dijamin matriks(A′A)−1 jadi matriksA dijamin mempunyaiGeneralInversyang diberikan olehA− = (A′A)−1A′.
- Sebaliknya bila kolom-kolom matriksA tidak bebas linear, maka(A′A)−1
tidak ada. Jadi persoalanAxxx = yyy tidak bisa diselesaiakan dengan cara ge-neral inversxxx = (A′A)−1A′yyy. Hal ini bisa diselesaikan dengan carapsedoinverssebagaimana pada Contoh7.9.4.
- Sebagai kesimpulan penyelesaian terdekat dari masalahAxxx=yyy bisa dilakukandengan caraPsedo InversatauGeneral Invers.
7.10 Dekomposisi Spektral
Sebagaiman telah diketahui pada pembahasan sebelumnya matriks persegi sime-tri mempunyai suatu peranan yang penting kaitannya dengan basis orthogonaldan pendiagonalan matriks. Hasil yang telah dibahas bisa disimpulkan lagi se-bagai berikut:Suatu matriks persegiA dapat didiagonalkan secara orthogonal bila dan hanyabila A matriks simetri. Yaitu ada matriks orthogonalP sehinggaP′AP= D, de-nganD adalah matriks diagonal. Kesimpulan ini dinamakanTeorema Spektral.Bila matriks
P= [uuu1 uuu2 · · · uuun]
maka dapat ditulis sebagai
A= x1uuu1uuu′1+x2uuu2uuu
′2+ · · ·+xnuuunuuu
′n,
dengan masing-masingxi, i = 1,2, . . . ,n adalah nilai-eigen dari matriks simetriA. Selanjutnya bentuk ini dinamakandekomposisi spektral. Masing-masingmatriksuuuiuuu′i, i = 1,2, . . . ,n adalahmatriks proyeksi dari sebarang vektorxxx, yaituvektor(uuuiuuu′i)xxx adalah proyeksi orthogonal darixxx pada ruang yang dibangun olehuiuiui ( 〈uiuiui〉 ).
Contoh 7.10.1Dibahas lagi matriks simetri
A=
6 −2 −1−2 6 −1−1 −1 5
.

208
Nilai eigen dariA didapat dari polininomial karakteristik matriksA yatitu p(λ)dengan menyelesaikan det(λ I −A) = 0, didapat
p(λ) = λ3−17λ2+90λ−144
= (λ−8) (λ−6) (λ−3) .
Terlihat bahwa nilai-eigen dariA berbeda, yaituλ1 = 8, λ2 = 6 danλ3 = 3.Vektor-eigen dariA yang bersesuaian dengan nilai-eigen adalah:
λ1 = 8 ⇒ vvv1 =
−110
,λ2 = 6 ⇒ vvv2 =
−1−12
, λ3 = 3 ⇒ vvv3 =
111
dan
〈vvv1,vvv2〉= 0,〈vvv1,vvv3〉= 0 dan〈vvv2,vvv3〉= 0 .
Terlihat bahwa vektor-vektorvvv1,vvv2,vvv3 saling orthogonal. Dengan melakukanpenormalan didapat
uuu1 =vvv1
‖vvv1‖=
12
√2
−12
√20
, uuu2 =vvv2
‖vvv2‖=
16
√3
16
√6
−13
√6
, uuu3 =vvv3
‖vvv3‖
13
√3
13
√3
13
√3
dan matriks
P= [uuu1 uuu2 uuu3] =
12
√2 1
6
√6 1
3
√3
−12
√2 1
6
√6 1
3
√3
0 −13
√6 1
3
√3
.
Dapat ditunjukkan bahwaP′AP= D denganD matriks diagonal, elemen elemendiagonalnya adalah 8, 6 dan 3 sebagai berikut:
P′AP =
12
√2 −1
2
√2 0
16
√6 1
6
√6 −1
3
√6
13
√3 1
3
√3 1
3
√3
6 −2 −1−2 6 −1−1 −1 5
12
√2 1
6
√6 1
3
√3
−12
√2 1
6
√6 1
3
√3
0 −13
√6 1
3
√3
=
8 0 00 6 00 0 3
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 209
Vektor-vektoruuu1,uuu2 danuuu3 memenuhi
8uuu1uuu′1+6uuu2uuu
′2+3uuu3uuu
′3 =
6 −2 −1−2 6 −1−1 −1 5
= A.
Selanjutnya bila diberikan vektor
xxx=
123
,
maka dapat ditunjukkan bahwa proyeksixxx pada〈uuu1〉 adalah(uuu1uuu′1)xxx sebagaiberikut
(uuu1uuu′1)xxx=
12 −1
2 0−1
212 0
0 0 0
123
=
−12
120
Sedangkan proyeksi darixxx pada〈uuu1〉 diberikan oleh
(〈xxx,uuu1〉/〈uuu1,uuu1〉)uuu1,
yaitu:
(〈xxx,uuu1〉/〈uuu1,uuu1〉)uuu1 =
[1 2 3
]
− 1√2
1√2
0
− 1√2
1√2
0
=
−12
120
Terlihat bahwa(uuu1uuu
′1)xxx= (〈xxx,uuu1〉/〈uuu1,uuu1〉)uuu1.
Juga bisa ditunjukkan bahwa vektor
xxx−(uuu1uuu′1)xxx
orthogonal dengan vektoruuu1 dan
xxx= (uuu1uuu′1)xxx+(xxx−(uuu1uuu
′1)xxx).
Vektorxxx−(uuu1uuu′1)xxx danuuu1 adalah
xxx−(uuu1uuu′1)xxx=
32323
dan u1u1u1 =
− 1√2
1√2
0
.
Terlihat bahwa vektorxxx−(uuu1uuu′1)xxx orthogonal denganuuu1.

210
Latihan:
Diberikan matriks simetri
A=
[7 22 4
]
Konstruksi suatu dekomposisi spektral dari matriksA sehingga
A= auuu1uuu′1+buuu2uuu
′2
dan D = [uuu1 uuu2]′A[uuu1 uuu2] denganD adalah matriks diagoanal dengan elemen
diagonala danb, danuuu1,uuu2 adalah orthonormal. Selanjutnya bila vektorxxx adalah
xxx=
[12
]
,
maka tunjukkan bahwa proyeksixxx padauuu2 adalah(uuu2uuu′2)xxx.
BENTUK KUADRAT
Bentuk kuadrat memainkan suatu peranan penting dalam masalah optimasi. Se-bagai motifasi dan ide bentuk kuadrat, diberikan contoh berikut. misalkan fungsidariR2 keR diberikan oleh
q((x1,x2)′) = 8x2
1−4x1x2+5x22
Tentukan apakahq((0,0)′) = 0 adalah maksimum global atau minimum globalatau tidak kedua-duanya. Ingat bahwaq((0,0)′) adalah minimum global bila
q((0,0)′)≤ q((x1,x2)′)
untuk semua(x1,x2)′ ∈R2. Maksimum global didefinisikan dengan cara analogi
(mengganti≤ dengan≥).
Ada beberapa cara untuk menyelesaikan masalah pada contoh yang diberikan.Disini akan digunakan matriks untuk menyelesaikannya. Dalam hal ini, dapatditulis
q
[x1
x2
]
= 8x21−4x1x2+5x2
2
=[x1 x2
][
8x1−2x2
−2x1+5x2
]

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 211
Secara ringkas, didapatq(xxx) = x′x′x′Axxx
dengan
A=
[8 −2−2 5
]
danxxx=
[x1
x2
]
.
Matriks A simetri, dari pembahasan sebelumnya ada basis-eigen orthonormalvvv1,vvv2 untukA. Didapat
vvv1 =
[2√5
− 1√5
]
, vvv2 =
[1√5
2√5
]
yang bersesuaian dengan nilai-eigenλ1 = 9 danλ2 = 4. Bila xxx = c1vvv1+ c2vvv2
didapat
q(xxx) = x′x′x′Axxx
= (c1vvv1+c2vvv2)′(c1λ1vvv1+c2λ2vvv2)
= λ1c21+λ2c2
2
= 9c21+4c2
2 .
Terlihat bahwaq(xxx) > 0 untuk semuaxxx 6= 000, sebab setidaknya satu diantara 9c21
dan 4c22 adalah positip. Jadiq((0,0)′) = 0 adalah minimum global. Hasil yang
telah didapat menunjukkan bahwa sistem koordinatc1,c2 didifinisikan sebagaisuatu basis-eigen dariA. Bentuk
9c21+4c2
2
lebih mudah dibandingkan dengan bentuk aslinya
8x21−4x1x2+5x2
2.
Dua sistem koordinat dari apa yang telah dibahas ini diberikan oleh gambarberikut.
Selanjutnya dari ide yang telah dibahas disajikan lebih general sebagai berikut.Suatu fungsi dariRn keR yaitu
q((x1,x2, . . . ,xn)′)

212
dinamakan suatu bentuk kuadrat bila ia adalah suatu kombinasi linear dari bentukxix j dengani mungkin sama denganj. Suatu bentuk kuadrat dapat ditulis sebagai
q(xxx) = 〈xxx,Axxx〉= x′x′x′Axxx,
untuk suatu matrik simetriA tunggal yang dinamakan matriks dariq. HimpunanQn dari bentuk kuadrat
q((x1,x2, . . . ,xn)′)
adalah suatu ruang bagian dari ruang linear dari semua pemetaan linear dariRn
keR.
Contoh 7.10.2Diberikan bentuk kuadrat
q((x1,x2,x3)) = 9x21+7x2
2+3x33−2x1x2+4x1x3−6x2x3.
Dapatkan matriks dariq.
JawabSebagaimana contoh sebelumnya, misalkan
ai,i adalah koefisien darix2i ,
ai, j = a j,i =12 (koefisien darixix j), bila i 6= j.
Didapat
A=
9 −1 2−1 7 −32 −3 3
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 213
Pembahasan yang telah dibuat pada Contoh7.10.2dapat digeneralisasi sebagaiberikut.
Diberikan suatu bentuk kuadratq(xxx) = x′x′x′Axxx, dengan matriksA berukurann×n. MisalkanB adalah suatu basis-eigen orthonormal yang bersesuaian dengannilai-eigenλ1,λ2 . . . ,λn. Maka
q(xxx) = λ1c21+λ2c2
2+ · · ·+λnc2n,
denganci adalah koordinat-koordinat darixxx relatif terhadapB . Dalam pengka-jian suatu bentuk kuadratq sering tertarik untuk menentukan apakahq(xxx) > 0untuk semuaxxx 6= 000. Dalam konteks ini dikenalkan terminologi berikut.
Misalkan suatu bentuk kuadrat
q(xxx) = x′x′x′Axxx,
denganA matriks simetri berukurann× n, makaA dinamakandefinit positipbila q(xxx) positip untuk semuaxxx∈ Rn denganxxx 6= 000 dan dinamakansemidefinitpositip bila q(xxx) ≥ 0 untuk semuaxxx ∈ Rn. Definit negatip dan semedefinitnegatip didefinisikan secara analogi. Bilaq mempunyai nilai positip dan juganilai negatip, makaA dinamakantakdefinit .
Contoh 7.10.3Diberikan matriksA berukurann×n. Tunjukkan bahwa
q(xxx) = ‖Axxx‖2
adalah suatu bentuk kuadrat, dapatkan matriks dariq dan tentukan kedefinitan-nya.
JawabPersamaanq(xxx) = ‖Axxx‖2 dapat ditulis sebagai
q(xxx) = (Axxx)′Axxx= x′x′x′(A′A)xxx
Terlihat bahwaq adalah bentuk kuadrat dengan matriksnya adalahA′A. Bentukkuadrat ini semidefinit positip sebabq(xxx) = ‖Axxx‖2 ≥ 0 untuk semuaxxx ∈ Rn.Catatan,q(xxx) = 0 bila dan hanya bilaxxx di kernel dariA. Maka dari itu, bentukkuadrat adalah definit positip bila dan hanya bila ker(A) = {000}.

214
Teorema 7.10.1Suatu matriks simetriA adalah definit positip bila dan hanyabila semua nilai-eigen dari matriksA positip, MatriksA adalah semidefinit posi-tip bila dan hanya bila nilai-eigen dariA positip atau nol.
Bukti Langsung dari fakta bentuk
q(xxx) = λ1c21+λ2c2
2+ · · ·+λnc2n,
denganλi adalah nilai-eigen dariA.
Contoh 7.10.4Diberikan suatu transformasi linearL(xxx) = Axxx dengan matriks
A=
[6 2−7 6
]
.
(a) Dapatkan suatu basis orthonormalv1,v2v1,v2v1,v2 di R2 sedemikian hinggaL(v1v1v1) danL(v2v2v2) orthogonal.
(b) Tunjukkan bahwa image dari lingkaran satuan oleh transformasiL dijadikanellips. Dapatkan sumbu-sumbu ellips dalam nilai-eigen matriks A′A.
Jawab
(a) Menggunakan ide contoh pertama, basis-eigen orthonormal dari A′A diper-oleh sebagai berikut.
A′A=
[6 −72 6
][6 −72 6
]
=
[85 −30−30 40
]
.
Polinomial karakteristik dariA′A adalah
p(λ) = λ2−125λ+2500= (λ−100)(λ−25),
jadi nilai-eigen dariA adalahλ1 = 100 danλ2 = 25 dan vektor-eigen yangbersesuaian adalah
x1x1x1 =
[2−1
]
dan x2x2x2 =
[12
]
.
Penormalan darix1x1x1 danx2x2x2 didapat
v1v1v1 =
[2√5
− 1√5
]
dan v2v2v2 =
[1√5
2√5
]
.
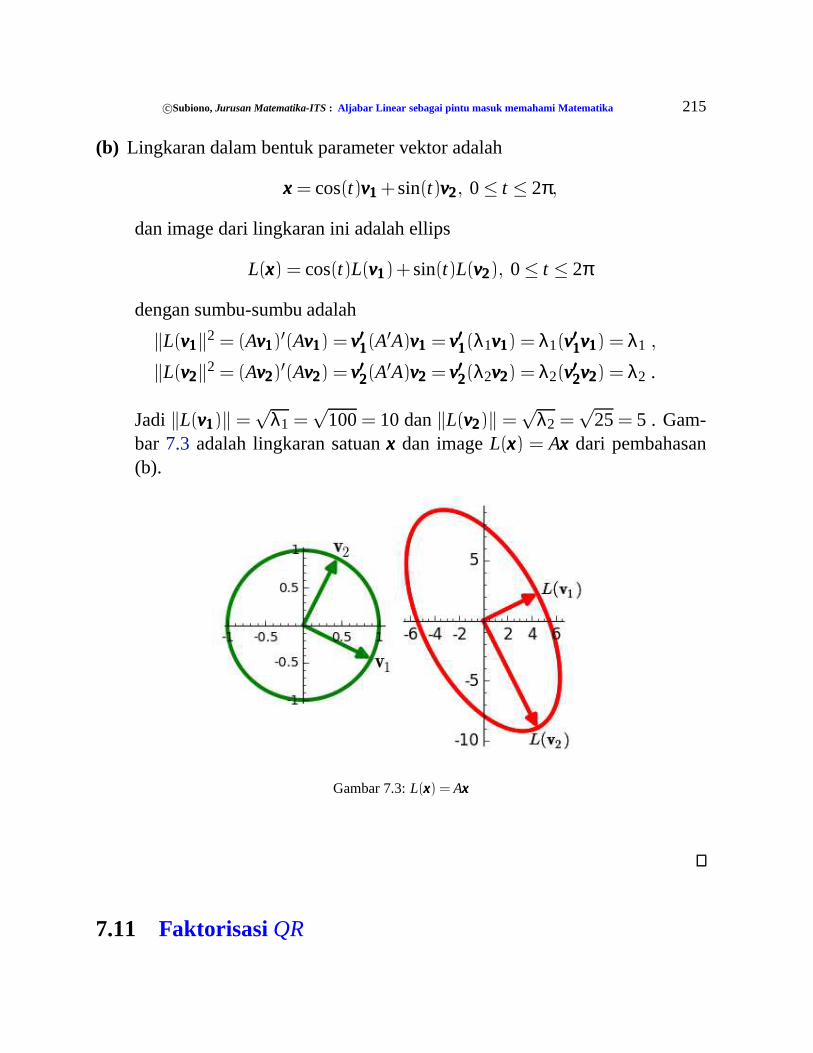
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 215
(b) Lingkaran dalam bentuk parameter vektor adalah
xxx= cos(t)v1v1v1+sin(t)v2v2v2, 0≤ t ≤ 2π,
dan image dari lingkaran ini adalah ellips
L(xxx) = cos(t)L(v1v1v1)+sin(t)L(v2v2v2), 0≤ t ≤ 2π
dengan sumbu-sumbu adalah
‖L(v1v1v1‖2 = (Av1v1v1)′(Av1v1v1) = v′1v′1v′1(A
′A)v1v1v1 = v′1v′1v′1(λ1v1v1v1) = λ1(v′1v1v′1v1v′1v1) = λ1 ,
‖L(v2v2v2‖2 = (Av2v2v2)′(Av2v2v2) = v′2v′2v′2(A
′A)v2v2v2 = v′2v′2v′2(λ2v2v2v2) = λ2(v′2v2v′2v2v′2v2) = λ2 .
Jadi‖L(v1v1v1)‖ =√
λ1 =√
100= 10 dan‖L(v2v2v2)‖ =√
λ2 =√
25= 5 . Gam-bar 7.3 adalah lingkaran satuanxxx dan imageL(xxx) = Axxx dari pembahasan(b).
Gambar 7.3:L(xxx) = Axxx
7.11 Faktorisasi QR

216
Dalam bagian ini dibahas langkah-langkah dari pemfaktoranmatriksA beruku-rann×k menjadi perkalian dari matriksQ danR.
Misalkan matriksA berukurann×k dengann≥ k dan kolom kolomA:
www1,www2, · · · ,wwwk
bebas linear, makaA dapat difaktorkan menjadiA=QRdengan langkah-langkahsebagai berikut:
1. Gunakan Proses Gram-Schmidt pada
{www1,www2, · · · ,wwwk}menjadi
{vvv1,vvv2, · · · ,vvvk}
2. Normalisasi{vvv1,vvv2, · · · ,vvvk}
menjadi{uuu1,uuu2, · · · ,uuuk}
3. Buat matriksQ= [uuu1 uuu2 · · · uuuk]
4. Buat matriksR= Q′A
Maka didapatA=QR.. Contoh berikut menjelaskan langkah-langkah faktorisasiQR.
Contoh 7.11.1Diberikan matriks
A=
1 0 00 1 11 1 00 0 1
Selanjutnya gunakan Proses Gram-Schmidt didapat
vvv1 =www1 =
1010
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 217
vvv2 =www2−(〈www2,vvv1〉/〈vvv1,vvv1〉)vvv1 =
−12
1120
Untuk menghindari pecahanvvv2 kalikan dengan 2, didapat
vvv2 =
−1210
Selanjutnya dihitung
vvv3 = www3−(〈www3,vvv1〉/〈vvv1,vvv1〉)vvv1−(〈www3,vvv2〉/〈vvv2,vvv2〉)vvv2
=
1313−1
31
Juga, untuk menghindari pecahanvvv3 kalikan dengan 3, didapat
vvv3 =
11−13
Normalisasivvv1,vvv2 danvvv3 didapat
uuu1 =
1√2
01√2
0
,uuu2 =
− 1√6
2√6
1√6
0
danuuu3 =
12√
31
2√
3− 1
2√
3√3
2
.
Dengan demikian matriksQ= [uuu1 uuu2 uuu3] adalah:
Q= [uuu1 uuu2 uuu3] =
1√2
− 1√6
12√
30 2√
61
2√
31√2
1√6
− 12√
3
0 0√
32
.

218
Sedangkan matriksR= Q′A adalah
R= Q′A=
√2 1√
20
0√
3√2
√2√3
0 0 2√3
.
Selanjutnya ditunjukkan bahwaQR= A, sebagai berikut
QR =
1√2
− 1√6
12√
30 2√
61
2√
31√2
1√6
− 12√
3
0 0√
32
√2 1√
20
0√
3√2
√2√3
0 0 2√3
=
1 0 00 1 11 1 00 0 1
= A .
FaktorisasiQR suatu alat komputasi untuk menyelesaiakan sistem persamaanlinearAxxx= bbb secara numerik.
Berikut ini diberikan suatu sifat untuk menyelesaikanAxxx = bbb menggunakanfaktorisasiQR.
Teorema 7.11.1Misalkan matriksA berukurann× k dengann≥ k dan kolom-kolom dariA adalah bebas linear, maka penyelesaian
Axxx= bbb
diberikan olehxxx= R−1Q′bbb
yang mana matriksQ danR memenuhiA= QR.
BuktiAxxx= bbb ⇒ (A′A)xxx= A′bbb.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 219
MisalkanA=QR, yang mana matriksQ danRdiperoleh dengan cara faktorisasiQR. Didapat
(QR)′(QR)xxx= (QR)′bbb ⇒ (R′Q′QR)xxx= R′Q′bbb.
Tetapi karenaQ matriks orthogonal, makaQ′Q= I . Jadi
R′Rxxx= R′Q′bbb
atauRxxx= Q′bbb, tetapiR matriks yang selalu mempunyai invers. Jadi
xxx= R−1Q′bbb.
Dalam prakteknya, sering memudahkan untuk menghindari kesalahan pemoton-gan desimal.Axxx=bbb diselesaikan lewat substitusi mundur dariRxxx= Q′bbb. Contohberikut ini menjelaskan masalah ini.
Contoh 7.11.2Selesaikan sistem persamaan linear berikut.
1 0 00 1 11 1 00 0 1
xyz
=
39
7.55
.
Disini matriksA danbbb adalah
A=
1 0 00 1 11 1 00 0 1
danbbb=
39
7.55
.
Sebagaimana telah dibahas sebelumnya, matriksA dapat didekomposisi menjadi
220
A= QRdenganQ diberikan oleh
Q =
1√2
− 1√6
12√
30 2√
61
2√
31√2
1√6
− 12√
3
0 0√
32
=
0.70710678118655−0.40824829046386 0.288675134594810.0 0.81649658092773 0.28867513459481
0.70710678118655 0.40824829046386 −0.288675134594810.0 0.0 0.86602540378444
.
Sedangkan matriksR adalah
R =
√2 1√
20
0√
3√2
√2√3
0 0 2√3
=
1.414213562373095 0.70710678118655 0.00.0 1.224744871391589 0.816496580927730.0 0.0 1.154700538379252
.
Matriks Q′bbb adalah
Q′bbb=
7.4246212024587759.185586535436945.629165124598845
Dari persamaanRxxx= Q′bbb didapatxxx= (x,y,z)′ sebagai berikut
z= 5.629165124598845/1.154700538379252= 4.874999999999994
y= 4.250000000000006 danx= 3.125000000000008.
Selanjutnya, dapat dilihat seberapa dekat nilaiAxxx denganbbb sebagai berikut
Axxx=
3.1250000000000089.125
7.3750000000000144.874999999999994
danbbb=
39
7.55
.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 221
Latihan
Dengan menggunakan dekomposisiQR selesaikan sistem persamaan linearberikut
3x+10y=−8, 4x−4y= 30 dan 12x+27y= 10.
7.12 DEKOMPOSISI NILAI SINGULAR
Diberikan matriksAberukuranm×n, dekomposisi nilai singular matriksAadalahberkaitan dengan matriksQ danP sehinggaA= QDP′ denganQ,P adalah ma-triks orthogonal danD matriks berukuranm×n dengan elemen-elemen didiag-onal utamanya nonnegatif dan yang lainnya nol.
1. Nilai Singular dan Vektor Singular Kanan
Bila A matriks berukuranm×n, makaA′A adalah matriks simetri. Sebagai manatelah dibahas matriks A’A dapat didiagonalkan secara orthogonal, yaitu ada ma-triks orthogonalP sehinggaP′(A′A)P adalah matriks diagonal. Selanjutnya bilaδ adalah nilai-eigen dari matriksA′A yang bersesuaian dengan vektor-eigen sa-tuanvvv (salah satu kolom dariP), maka
‖Avvv‖2 = 〈(Avvv),(Avvv)〉 = v′v′v′(A′A)vvv= v′v′v′δvvv= δv′vv′vv′v= δ.
Terlihat bahwaδ≥ 0. Jadi nilai-eigen dariA′A adalah nononegatip.
Contoh 7.12.1Misalkan matriks
A=
1 −11 1−1 −1
makaA′A=
[3 11 3
]
Polinomial karakteristik dari matriksA′A adalah
p(δ) = δ2−6δ+8= (δ−4) (δ−2) ,

222
didapatδ1 = 4 danδ2 = 2. Vektor-eigen yang bersesuaian adalah
v1v1v1 =
[11
]
danv2v2v2 =
[−11
]
Penormalan vektor-vektor eigen didapat matriks orthogonal
P=1√2
[1 −11 1
]
dan
P′(A′A)P=1√2
[1 1−1 1
][3 11 3
]1√2
[1 −11 1
]
=
[4 00 2
]
.
Telah dibahas bahwa semua nilai-eigen dari matriksA′A adalah nonnegatif. Did-ifinisikan hal berikut. MisalkanA adalah matriks berukuranm×n dan
δ1≥ δ2≥ ·· · ≥ δk > δk+1 = · · · = δn = 0
adalah nilai eigen dariA′A ditulis dengan urutan menurun. Bilaσi =√
δi,maka
σ1≥ σ2≥ ·· · ≥ σk > σk+1 = · · ·= σn = 0
dinamakannilai-nilai singular dari matriksA. Selanjutnya bila
vvv1,vvv2, . . . ,vvvn
adalah vektor-vektor eigen orthonorma dari matriksA′A denganvvvi bersesuaiandengan nilai-eigenδi, maka
vvv1,vvv2, . . . ,vvvn
dinamakanvektor-vektor singular kanan dari matriksA.
Teorema 7.12.1MisalkanA matrix berukuranm×n danδi, i = 1,2, . . . ,n adalahnilai-eigen dari matriksA′A sedangkanσi, i = 1,2, . . . ,n adalah nilai singular dariA yang bersesuaian dengan vektor singular kananvvvi dari matriksA, maka
1. Untuk semuaxxx di Rn, 〈Axxx,Avvvi〉= δi〈xxx,vvvi〉.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 223
2. Untuki tidak sama denganj, Avvvi orthogonal denganAvvv j .
3. 〈Avvvi,Avvvi〉= σ2i .
4. Bilaxxx= a1vvv1+a2vvv2+ · · ·+anvvvn, maka〈Axxx,Avivivi〉= aiδi
Bukti
1. 〈Axxx,Avvvi〉= xxx′(A′A)vvvi = δixxx′vvvi = δi 〈xxx,vvvi〉
2.⟨Avvvi,Avvv j
⟩= vvv′i(A
′A)vvv j = δ j⟨vvvi,vvv j
⟩= δ j(0) = 0
3. 〈Avvvi,Avvvi〉= vvv′i(A′A)vvvi = δivvv′ivvvi = σ2
i (1) = σ2i
4. 〈Axxx,Avvvi〉= δi 〈xxx,vvvi〉= δi(a1 vvv′1vvvi︸︷︷︸
0
+ · · ·+ai vvv′ivvvi︸︷︷︸
1
+ · · ·+an vvv′nvvvi︸︷︷︸
0
) = aiδi
2 Nilai Singular dan Vektor Singular Kiri
Sebagaimana telah dibahas vektor-vektor singular kanan
vvv1,vvv2,vvv3, . . . ,vvvn
membentuk suatu basis orthonormal diRn, maka himpunan
{Avvv1,Avvv2, . . . ,Avvvn}
membentang image dari dari pemetaan linear linier
L : Rn→ Rm
yang diberikan olehL(vvv) = Avvv, ∀vvv∈ Rn. Selanjutnya bila
δ1≥ δ2≥ ·· · ≥ δk > δk+1 = · · ·= δn = 0,
maka dari pembahasan Teorema7.12.1didapat :
Avvvk+1 = · · · = Avvvn = 000Rm
224
Jadi pembentang orthogonal dari imageL adalah
Avvv1,Avvv2, . . . ,Avvvk
dan merupakan suatu basis dari imageL. Suatu peranan penting dari basis imageL sebagai mana diberikan dalam difinisi dan teorema berikut.
Definisi 7.12.2MisalkanA suatu matriks ukuranm×n dan
δ1≥ δ2≥ ·· · ≥ δk > δk+1 = · · ·= δn = 0,
adalah nilai singular dariA. Juga misalkan bahwavvvi, i = 1,2, . . . ,n adalah vektor-vektor singulir kanan dariA yang bersesuaian dengan nilai eigenσi. Bila
uuui =1σi
Avvvi, 1≤ i ≤ k
danuuuk+1, . . . ,uuum
dipilih sedemikian hingga
uuu1,uuu2, . . . ,uuuk,uuuk+1, . . . ,uuum
suatu basis orthonormal dariRm, maka
uuu1,uuu2, . . . ,uuuk,uuuk+1, . . . ,uuum
dinamakanvektor-vektor singular kiri dariA.
Teorema 7.12.2MisalkanA matriks berukuranm×n dan
δ1≥ δ2≥ ·· · ≥ δk > δk+1 = · · ·= δn = 0,
adalah nilai singular dariA. Juga misalkan bahwavvvi, i = 1,2, . . . ,n adalah vektorsingular kiri dariA. Bila L : Rn→ Rm diberikan olehL(xxx) = Axxx, ∀xxx ∈ Rn danLT : Rm→ Rn diberikan olehL(yyy) = A′yyy, ∀yyy∈ Rm, maka
1. rank(A) = k.
2. Vektoruuui untuk i = 1,2, . . . ,k adalah suatu basis orthonormal dariL.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 225
3. Vektoruuu j untuk j = k+1,k+2, . . . ,m adalah suatu basis orthonormal darikernelLT .
4. Vektorvivivi untuki = 1,2, . . . ,k adalah suatu basis orthonormal dari imageLT
dan vektorvvvi untuk j = k+1,k+2, . . . ,n adalah suatu basis orthonormaldari kernelL
5. BilaU = [uuu1 uuu2 . . . uuum], V = [vvv1 vvv2 . . . vvvm] dan matriksΣ berukuranm×ndengan elemen diagonaldi,i = σi, i ≤ k sedangkan elemen yang lainnyasama dengan nol, makaA=UΣV ′
Bukti Sebagai latihan.
Contoh 7.12.3 (Dekomposisi Nilai Singular)Diberikan matriks
A=
1 −11 1−1 −1
Dekomposisikan kebentuk nilai singular sehinggaA=UΣV ′
JawabDihitung duluA′A, sehingga didapat nilai-nilai singular dariAdan vektor-vektor singular kanan dariA.
A′A=
[3 11 3
]
Polinomial karakteristik dari matriksA′A adalah
p(δ) = δ2−6δ+8= (δ−4) (δ−2)
didapat nilai eigenδ1 = 4 danδ1 = 2. Vektor-eigen yang bersesuaian adalah
vvv1 =
[11
]
dan vvv2 =
[−11
]
Penormalan vektor-vektor eigen didapat matriks orthogonal V
V =1√2
[1 −11 1
]

226
Vektor singular kanan dariA adalah
vvv1 =
[1√2
1√2
]
dan vvv2 =
[
− 1√2
1√2
]
Nilai singular dariA adalahσ1 =√
δ1 =√
4= 2 danσ2 =√
δ2 =√
2. Didapatmatriks
Σ =
σ1 00 σ2
0 0
=
2 00√
20 0
.
Vektor-vektor singular kiri didapat sebagai berikut.
uuu1 =1
σ1Avvv1 =
12
1 −11 1−1 −1
[1√2
1√2
]
=
01√2
− 1√2
dan
uuu2 =1
σ2Avvv2 =
1√2
1 −11 1−1 −1
[
− 1√2
1√2
]
=
−100
.
Perluas vektor-vektoruuu1,uuu2 menjadiuuu1,uuu2,uuu3 sehingga vektor vektor ini adalahsuatu basis dariR3. Dalam kasus ini vektoruuu3 bisa dipilih sebagai
uuu3 =
010
Lakukan proses Gram-Schmidt pada vektor-vektoruuu1,uuu2,uuu3 didapat matrisU
U =
0 −1 01√2
0 1√2
− 1√2
0 1√2
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 227
Selanjutnya selidiki bahwaUΣV ′ = A sebagai berikut
UΣV ′ =
0 −1 01√2
0 1√2
− 1√2
0 1√2
2 00√
20 0
1√2
[1 1−1 1
]
=
0 −11 0−1 0
[1 1−1 1
]
=
1 −11 1−1 −1
= A.
LATIHANLakukan langkah-langkah pembahasan Contoh Dekomposisi Nilai Singular meng-gunakan SAGE. Perintah dalam sel SAGE sebagai berikut:
A=matrix(RDF,[[1,-1],[1,1],[-1,-1]])U,S,V=A.SVD()html("Matriks $A=%s$"%latex(A))printhtml("$U=%s$<p>$S=%s$<p>$V=%s$"%(latex(U),latex(S),latex(V)))printhtml("$U\Sigma V’=%s$"%latex(U*S*transpose(V)))printhtml("$A-U\Sigma V’=%s$"%latex(A-U*S*transpose(V)))
Hasil yang diberikan adalah:
Matriks A=
1.0 −1.01.0 1.0−1.0 −1.0
U =
−1.54742755068×10−16 −1.0 −6.41074621127×10−17
0.707106781187 −4.28259858132×10−17 0.707106781187−0.707106781187 4.28259858132×10−17 0.707106781187
S=
2.0 0.00.0 1.414213562370.0 0.0

228
V =
[0.707106781187−0.7071067811870.707106781187 0.707106781187
]
UΣV ′ =
1.0 −1.01.0 1.0−1.0 −1.0
A−UΣV ′ =
[1.11022302463×10−16 0.0−2.22044604925×10−16 −4.4408920985×10−16
2.22044604925×10−16 4.4408920985×10−16
]
Pada pembahasan terdahulu mengenai matriks simetri dikenal istilah dekom-posisi spektral yaitu:
Bila A matriks simetri danA dapat didiagonalkan sebagai bentukD = P′APyang manaD matriks diagonal dengan elemen diagonal utama adalahδi, i =1,2. . . ,n adalah nilai eigen dari matriksA danuuui adalah vektor eigen yang ber-sesuaian.
Bila P= [u1 u2 · · · unu1 u2 · · · unu1 u2 · · · un], makaA dapat didekomposisi sebagai
A= δ1uuu1uuu′1+δ2uuu2uuu
′2+ · · ·+δnuuunuuu
′n.
Timbul pertanyaan bagaimana bila matriksA tidak simetri atau secara umummatriksAberukuranm×napakahAbisa didekomposisi seperti cara dekomposisispektral. Hal ini bisa dilakukan dengan menggunakan hasil-hasil dekomposisinilai singular sebagai berikut.
Sebagaimana telah dibahas bilaA mempunyai rank sama dengank , makaAdapat didekomposisi sebagaiA =U Σ V ′, denganU adalah vektor singular kiridanV vektor singular kanan danvvvi, i = 1,2, . . . ,n adalah suatu basis orthormaldariRn, maka untuk 1≤ i ≤ k didapat
(k
∑i=1
σi uuui vvv′i
)
vvvi = 0+ · · ·+σiuuui + · · ·+0
= σi
(1σi
Avvvi
)
= Avvvi.
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 229
Jadik∑
i=1σi uuui vvv′i = A. Pada Contoh sebelumnya matriks
A=
1 −11 1−1 −1
dan rank(A) = k= 2. Jugaσ1 = 2 danσ1 =√
2, didapat vektor singular kiri
uuu1 =
01√2
− 1√2
,uuu2 =
−100
sedangkan vektor singular kanan adalah
vvv1 =
[1√2
1√2
]
,vvv2 =
[
− 1√2
1√2
]
.
Sehingga didapat
σ1uuu1vvv′1+σ2uuu2vvv
′2 = 2
01√2
− 1√2
[1√2
1√2
]
+√
2
−100
[
− 1√2
1√2
]
=
0 01 1−1 −1
+
1 −10 00 0
=
1 −11 1−1 −1
= A.
LATIHANLakukan langkah-langkah yang dibahas dalam Contoh ini dengan menggunakanSAGE.
3. Nilai Singular Dekomposisi untuk meghitung Psedo-Invers
Sebagaimana telah dibahas sebelumya Psedo-Invers didapatbila matriks persegiA′A tidak mempunyai invers, Psedo-Invers dalam hal ini dapat diperoleh den-gan cara proyeksi. Pada pembahasan ini digunakan Nilai Singular Dekomposisiuntuk memperoleh matriks Psedo-InversA sebagai berikut.

230
MisalkanA berukuranm× n dan mempunyai rank sama dengank dan ma-triks A didekomposisi sebagaiA=U Σ V ′ dengan kolom-kolomU adalah vektorsingular kiri, sedangkan kolom-kolomV adalah vektor singular kanan dan ma-triks Σ mempunyai elemen diagonal sama dengan nilai sigular dari A yaitu σi
sedangkan elemen yang lainnya sama dengan nol.
Bila matriksΣp berukurann×m dengan elemen-elemen diagonal1σi
sedan-
gkan elemen yang lainnya sama dengan nol, maka matriks berukurann×m
Ap =V Σp U ′
dinamakan Psedo-InversdariA. Sebagaimana telah duketahui pada pembahasansebelumnya, Psedo-Invers dapat digunakan untuk menyelesaikan sistem persamaanAxxx= bbb yaituxxx= Apbbb.
Sebagai contoh, misalkan diberikan matriks
A=
2 30 40 1
danbbb=
500040002000
.
SelesaikanAxxx= bbb menggunakanAp.¯JawabMatriks
A′A=
[2 0 03 4 1
]
2 30 40 1
=
[4 66 26
]
.
Polinomial karakteristik dari matriksA′A adalah:
p(δ) = δ2−30δ+68
didapatδ1 = 15+
√157= 27.52996408614167
danδ2 = 15−
√157= 2.470035913858332.
Vektor eigen orthonormal yang bersesuaian adalah
vvv1 =
[0.247087461322520.96899318184247
]
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 231
dan
vvv2 =
(0.96899318184247−0.24708746132252
)
Nilai singular dariA adalah
σ1 =√
δ1 = 5.246900426551058
danσ2 =
√
δ2 = 1.571634790229057
MatriksV danΣp adalah
V =
[0.24708746132252 0.968993181842470.96899318184247−0.24708746132252
]
dan
Σp =
[1
σ10 0
0 1σ2
0
]
=
[0.19058871308853 0 0
0 0.63628013722848 0
]
.
Sedangkan vektoru1u1u1 danu2u2u2 adalah
uuu1 =1
σ1Avvv1 =
0.648221653104290.738716654075670.18467916351892
dan
uuu2 =1
σ2Avvv2 =
0.76145169803919−0.62886737519092−0.15721684379773
.
Perluas basis orthogonalu1,u2u1,u2u1,u2 menjadiu1,u2,u3u1,u2,u3u1,u2,u3 dengan memilih
uuu3 =
00.2425356−0.9701425
.
Sehingga didapat matriks
U = [uuu1 uuu2 uuu3] =
0.64822165310429 0.76145169803919 00.73871665407567−0.62886737519092 0.24253560.18467916351892−0.15721684379773−0.9701425

232
dan
Ap = V Σp U ′
=
[0.5 −0.35294117647059−0.088235294117646
5.981326545168031710−15 0.23529411764707 0.058823529411767
]
. Sehingga didapat
xxx = Apbbb
=
[0.5 −0.35294117647059−0.088235294117646
5.981326545168032410−15 0.23529411764707 0.058823529411767
]
500040002000
=
[911.7647058823481058.823529411844
]
. Hasil yang didapat sama dengan hasil yang telah dibahas pada Contoh sebelum-nya.
LatihanLakukan langkah-langkah yang telah dibahas dalam Contoh menggunakan SAGE.
Contoh berikutA′A tidak mempunyai invers. Bila matriks
A=
[1 11 1
]
dan bbb=
(23
)
,
maka selesaiakanAxxx= bbb dengan menggunakan matriksAp
JawabMatriks
A′A=
[1 11 1
][1 11 1
]
=
[2 22 2
]
.
Perhatikan bahwa matriksA′A tidak mempunyai invers, dengan demikian seti-daknya ada satu nilai eigen dariA′A sama dengan nol. Polinomial karakteristikdari matriksA′A adalah
p(δ) = δ2−4δ = (δ−4)δ
c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 233
didapat
δ1 = 4 danδ2 = 0 ⇒ σ1 =√
δ1 = 2,1
σ1=
12.
Vektor-eigen yang bersesuaian adalah
vvv1 =
[1√2
1√2
]
dan vvv2 =
[1√2
− 1√2
]
.
Didapat matriks
V =
[1√2
1√2
1√2
− 1√2
]
danΣp =
[12 00 0
]
.
Sedangkan vektor
uuu1 =1
σ1Avvv1 =
[1√2
1√2
]
,
dengan demikian vektoruuu2 dapat dipilih sebagai
uuu2 =
[
− 1√2
1√2
]
.
Didapat matriks
U =
[1√2
− 1√2
1√2
1√2
]
.
Jadi matriks
Ap =V ΣP U ′ =[1
414
14
14
]
.
Dengan demikian didapat
xxx= Apbbb=
[14
14
14
14
][23
]
=
[5454
]
.
Bandingkan nilai
Axxx=
[14
14
14
14
][23
]
=
[5454
]
dengan
bbb=
[23
]
.
234
Tetapi pada contoh
A=
2 30 40 1
danbbb=
500040002000
,
matriks
A′A=
[4 66 26
]
mempunyai invers yaitu
(A′A)−1 =
[ 1334 − 3
34− 3
34117
]
.
General invers dariA diberikan oleh
A− =
[12 − 6
17 − 334
0 417
117
]
.
Jadi
xxx= A−bbb =
[12 − 6
17 − 334
0 417
117
]
500040002000
=
[1550017
1800017
]
=
[911.76470588235291058.823529411765
]
Bandingkan nilai
Axxx=
2 30 40 1
[911.76470588235291058.823529411765
]
=
5000.0000000000024235.294117647061058.823529411765
dengan
bbb=
500040002000
.
Cek matriksA−A sama dengan identitas:
A−1A=
[12 − 6
17 − 334
0 417
117
]
2 30 40 1
=
[1 00 1
]
.

c©Subiono,Jurusan Matematika-ITS: Aljabar Linear sebagai pintu masuk memahami Matematika 235
Atau dengan menggunakan nilai numerik
ApA =
[0.5 −0.35294117647059−0.088235294117646
5.981326545168033210−15 0.23529411764707 0.058823529411767
]
2 30 40 1
=
[1.0 −5.911937606128958610−15
1.196265309033606610−14 1.000000000000065
]
.
7.13 Bentuk Kanonik Jordan
disini dibahas pengertian dari bentuk kanonik Jordan.

236
Daftar Pustaka
[1] Richard Bronson, "Matrix Operations",International Edition, Schaum’sOutline Series, (1989).
[2] Paul Dawkins, "Linear Algebra",(http://tutorial.lamar.edu.aspx),(2007).
[3] Robert A. Beezer, "A First Course in Linear Alge-bra",(http://linear.ups.edu), (Version 2.22, April 16, 2010).
[4] Zumrotus Sa’diah, "Eksistensi Eigenvalue dan Eigenvektor", Tugas AkhirS1, Jurusan Matematika FMIPA-ITS, (2008)
[5] Howard Anton and Chris Rorres,"Elementary Linear Algebra", Ninth Edi-tion, John Wiley & Sons, (2005).
[6] Gilbert Strang, "Introduction to Linear Algebra",Third Edition, Wellesley-Cambridge Press, (2003).
[7] Ron Larson and David C. Falvo, "Elementary Linear Algebra", Six Edition,Houghton Mifflin Harcourt Publishing Company, (2009)
[8] T.S.Blyth and E.F.Robertson,"Basic Linear Algebra",Second Edition,Springer, (2002)
[9] Carl D. Meyer, "Matrix Analysis and Applied Linear Algebra", SIAM,(2000)
237