FLOW CONTROL
71
PRAKTIKAN : Billy Aprianto/0906635495 Davin Philo/0906556906 Johan Sebastian/0906515345 M. Normansyah/0806459835 Susatyo Adi/0806339345 Pengendalian Proses | Flow Control 0
-
Upload
irma-kartika-sari -
Category
Documents
-
view
214 -
download
35
description
SYALALA
Transcript of FLOW CONTROL

PRAKTIKAN :Billy Aprianto/0906635495Davin Philo/0906556906Johan Sebastian/0906515345M. Normansyah/0806459835Susatyo Adi/0806339345
| Flow Control 0

DAFTAR ISI
Daftar Isi......................................................................................................................... 1
Bab I PENDAHULUAN.................................................................................................2
1.1 Latar Belakang.............................................................................................. 2
1.2 Tujuan Percobaan..........................................................................................2
1.3 Rumusan Masalah.........................................................................................2
1.4 Landasan Teori..............................................................................................3
Bab II STUDI PUSTAKA.............................................................................................. 13
2.1 Prosedur Percobaan.......................................................................................13
2.2 Data Pengamatan.......................................................................................... 13
Bab III METODOLOGI.................................................................................................16
Bab IV HASIL & PEMBAHASAN...............................................................................28
4.1 Analisis Percobaan........................................................................................28
2.4 Analisis Perhitungan dan Hasil.....................................................................30
4.3 Analisis Grafik..............................................................................................33
4.4 Analisis Kesalahan........................................................................................34
Bab V PENUTUP (KESIMPULAN)..............................................................................36
Daftar Pustaka.................................................................................................................38
| Flow Control 1

BAB I
PENDAHULUAN
1.1 Latar Belakang
Laju alir dalam beberapa industri manufakturing menempati posisi yang sangat
menentukan terhadap kualitas maupun kuantitas hasil produksi. Ambil saja contoh
pemanfaatan laju alir udara dalam proses pemisahan inti (kernel) terhadap cangkang
(shell) pada sebuah pabrik kelapa sawit. Kernel adalah produk yang hendak diperoleh
dengan kualitas dan kuantitas semaksimal mungkin, sedangkan cangkang adalah sisa
hasil produksi yang harus dipisahkan sebagai limbah padat. Ketidak-stabilan dan
kecepatan respon terhadap perubahan nilai input set, akan berdampak besar terhadap
laju alir udara yang dihasilkan. Yang pada akhirnya akan berdampak pada kualitas
dan kuantitas produksi inti (kernel).
Untuk melakukan proses pengendalian laju alir udara yang optimal, dengan
metode yang dapat beradaptasi dengan cerdas terhadap setiap perubahan sifat dari
sistem yang ada, perlu dibuat suatu simulasi pengendalian laju alir udara dalam skala
laboratorium dengan menggunakan metode yang mampu membaca dan mengenali
kondisi input dan output dari sistem yang tersedia, serta mampu beradaptasi dengan
fleksibel, sehingga dapat memberikan pengendalian yang lebih baik.
Secara umum, terdapat tujuh tujuan utama dari kontrol proses, yakni: (1)
keamanan dan keselamatan kerja (safety); (2) perlindungan lingkungan (environmental
protection); (3) perlindungan alat (equipment protection); (4) operasi yang mulus dan
laju produksi yang tinggi (smooth operation and production rate); (5) kualitas produk
(product quality); (6) keuntungan (profit); (7) monitoring dan diagnosis.
Laju alir dapat mempengaruhi ketujuh hal di atas, tetapi umumnya, pengaturan
laju alir harus dilakukan karena mempengaruhi masalah:
1. Safety. Laju alir yang tidak sesuai pada proses, misalnya laju alir yang terlalu
tinggi pada valve, bisa menyebabkan kebocoran pada alat, mengeluarkan zat
beracun, dan mengganggu kesehatan manusia di sekitarnya.
| Flow Control 2

2. Equipment protection. Laju alir yang tidak sesuai dapat merusak alat, misalnya
alat bocor karena laju alir yang terlalu tinggi.
3. Laju produksi dan kualitas produk. Perubahan laju alir dapat mempengaruhi
kualitas produk dan kelancaran produksi. Perubahan laju alir ke nilai yang tidak
optimum akan menurunkan kualitas produk dan mempengaruhi kelancaran
produksi.
Biasanya, pada sebuah industri alat sudah ada sehingga karakteristik dinamis dan
statis dari suatu proses harus dibuat agar pengontrolan laju alir bisa terjadi. Karena
karakteristik respon dinamis dari perubahan laju alir terhadap waktu dan faktor-faktor
lainnya, maka pengaturan laju alir tidak bisa dilakukan secara sederhana (ON-OFF
Control), melainkan harus dengan algoritma tertentu, misalnya PID (Proportional,
Integral, Derivative). Diketahui bahwa menentukan karakteristik proses dan PID
Controller sangat dibutuhkan untuk pengaturan laju alir pada skala laboratorium
maupun skala industri. Di samping itu, Laboratorium Proses Pengendalian Teknik
memiliki salah satu alat kontrol yaitu Flow Control. Mengingat pentingnya pengaturan
laju alir dan PID Controller serta ketersediaan alat pada laboratorium, kami melakukan
percobaan berjudul “Pengaturan Laju alir (Flow Control)”.
1.2. Tujuan Percobaan
1.2.1 Tujuan Umum
Untuk mempelajari karakteristik statis dan dinamis dari proses dan mempelajari
bagaimana pengaturan laju alir dapat dilakukan.
1.2.2 Tujuan Khusus
1. Mempelajari proses kendali secara manual dan auto, terkhususnya pada
kasus flow control
2. Mempelajari karakter statis (SSE) dan dinamis (decay ratio, overshoot,
settling time) dari sistem flow control
3. Menentukan fungsi transfer dari sistem kendali proses (pendekatan
FOPDT)
| Flow Control 3

4. Menentukan dan mempelajari sistem PID tunning dengan menggunakan
tunning Zieger-Nichols II
5. Membandingkan karakter proses kendali dari parameter kendali
Proportional, Integrative, dan Derivative berdasarkan tunning Ziegler-
Nichols untuk P Control, PI Control, dan PID Control dan pengaruh
parameter-parameter tersebut terhadap respon sistem.
| Flow Control 4

BAB II
STUDI PUSTAKA
Flow control (pengaturan laju alir) adalah salah satu hal yang penting dalam industri. Laju
alir, disamping temperatur, komposisi, laju alir, dan ketinggian cairan, adalah variabel
penting yang harus dikendalikan agar proses berjalan dengan baik. Pada bagian ini, akan
dijelaskan sistem kontrol lup tertutup sebagai dasar pengaturan proses secara umum dan
pengaturan laju alir secara khusus, komponen-komponen sistem kontrol, pemodelan
mekanistik dan pemodelan empirik, dan algoritma pengaturan laju alir, khususnya dengan
algoritma PID (Proportional, Integral, Derivative).
2.1 Sistem Kontrol Lup Tertutup
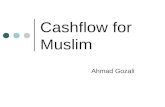
Kita perlu mengembangkan model dinamik umum untuk sistem kontrol lup
tertutup, di mana proses dan pengontrol bekerja sebagai satu sistem yang terintegrasi.
Gambaran model lup tertutup diberikan pada Gambar 2.1. Pada gambar, terdapat fungsi
transfer dan variabel. Fungsi transfer terdiri dari: final element atau valve, Gv(s); proses
yang terjadi, Gp(s); sensor (untuk pengaturan laju alir adalah sensor laju alir), Gs(s);
fungsi hubungan disturbance (gangguan) terhadap variabel kontrol, Gd(s), dan;
pengontrol dengan algoritma tertentu, Gc(s).
Sedangkan variabel proses adalah: controlled variable atau variabel output yang
diatur besarnya, CV(s); manipulated variable atau input yang diatur besarnya, MV(s);
set point atau nilai yang diinginkan dan dicapai dengan bantuan pengontrol, SP(s);
error atau perbedaan antara set point dan measured controlled variable (CVm(s)), E(s);
disturbance atau dan perubahan input karena faktor eksternal, D(s).
Dari gambar ini, dapat diperoleh:
1. Set Point Response (SERVO) atau fungsi alih sistem lup keseluruhan dengan
menganggap D(s) = 0, dirumuskan:
CV ( s)SP(s)
=G p ( s) Gv (s )G c ( s)
1+G p ( s )Gv (s ) Gc ( s) Gs (s ) (2.1)
| Flow Control 5

2. Disturbance Response (REGULATORY) atau fungsi alih sistem lup
keseluruhan dengan menganggap SP(s) = 0, dirumuskan:
CV ( s)D(s)
=Gd
1+Gp ( s )Gv (s ) Gc ( s) Gs (s ) (2.2)
Gambar 2.1 Diagram Blok dari Sistem Kontrol Lup Tertutup
2.2 Komponen-komponen Penting Sistem Kontrol Lup Tertutup
Pada Subbab 2.1, telah dijelaskan hubungan umum berbagai komponen pada
sistem kontrol lup tertutup. Pada bagian ini, dijelaskan komponen-komponen penting
sistem secara lebih terperinci.
2.2.1 Sensor dan Transmitter
Sensor berfungsi untuk mengukur CV dan menghasilkan sinyal MV yang
sesuai. Sensor sering juga disebut sebagai elemen primer. Sedangkan transmitter
menguatkan sinyal ke tingkat voltase V(t) tertentu dan mengirimkan ke controller.
Transmitter sering disebut sebagai elemen sekunder. Ada tiga hal penting dalam sensor-
transmitter, yaitu:
1. Range of the instrument, yakni harga yang terendah dan tertinggi instrumen;
2. Span of instrument, yakni beda antara harga yang terendah dan tertinggi;
3. Zero of the instrument, yakni harga range yang terendah.
2.2.2 Controller
| Flow Control 6

Controller merupakan pusat dari sistem kontrol dan pembuat keputusan.
Pembuatan keputusan dilakukan dengan cara sebagai berikut:
1. Mengubah set point ke tegangan tertentu, VR;
2. Menghitung error, ε(t) = VR – V(t) ;
3. Menghitung daya yang diperlukan dan mengirim sinyalnya, P(t), ke final
element.
Ada 2 jenis aksi controller, yaitu: aksi berlawanan (reverse action), di
mana controller akan mengurangi sinyal outputnya bila harga output naik; aksi searah
(direct action), di mana controller akan meningkatkan sinyal outputnya.bila harga
output naik.
2.2.3 Proses
Proses merupakan bagian yang memerlukan pengontrolan. Proses bisa berupa
proses kimia maupun fisika dan pada bagian ini, variabel tertentu seperti: laju alir,
temperatur, atau laju alir dikontrol besarnya agar sesuai dengan yang diinginkan.
2.2.4 Final Element
Sebagai respon sinyal masukan P(t), final element merubah sinyal P(t) ke arus
yang menghasilkan daya yang sesuai. Final element biasanya berupa control valve. Ada
2 jenis control valve berdasarkan suplai udara, yaitu:
1. Fail Open (FO) atau Air to Close (AC), di mana control valve akan terbuka
jika tidak ada suplai udara dan tertutup katup jika ada suplai udara;
2. Fail Close (FC) atau Air to Open (AO), di mana control valve akan tertutup
jika ada suplai udara dan terbuka jika ada suplai udara.
2.2.5 Recorder
Recorder merupakan sistem pencatatan dari perubahan yang ada dan recorder
tidak diikutsertakan dalam perhitungan.
2.3 Pemodelan Empirik dan Mekanistis
| Flow Control 7

Terdapat dua jenis pemodelan proses, yaitu model empirik dan model
mekanistik. Perbedaan kedua metode ini diberikan pada Tabel 2.1.
Tabel 2.1 Perbandingan permodelan empirik dan mekanistik
Model Empirik Model Mekanistik
Diturunkan dari uji kinerja pada proses nyata;
Tidak didasarkan pada mekanisme yang
melandasinya;
Mencocokkan fungsi tertentu untuk
mencocokkan proses;
Hanya gambaran lokal dari proses saja (bukan
ekstrapolasi);
Model hanya sebaik datanya.
Diturunkan dari prinsip matematis
Berlandaskan pada pemahaman kita tentang
sebuah proses
Mengobservasi hukum kekekalan massa,
energi dan momentu;
Berguna untuk simulasi dan ekstrapolasi
kondisi operasi yang baru;
Mungkin mengandung konstanta yang tidak
diketahui yang harus diestimasi.
Kedua pemodelan ini dilakukan dengan pendekatan yang umum, yakni pendekatan
First-Order-Plus-Dead-Time (FOPDT) dan pendekatan orde tinggi.
2.3.1 Pendekatan First-Order-Plus-Dead-Time (FOPDT)
FOPDT merupakan metode pemodelan proses dinamik yang digunakan untuk
menentukan konstanta gain (Kp), dead time (θ), dan konstanta waktu (τ) pada sistem
yang dianggap memiliki orse satu sehingga didapatkan permodelan proses untuk suatu
sistem dinamik sebagai berikut.
G (s )=K p e−θs
τs+1 (2.3)
Nilai gain (Kp), dead time (θ), dan konstanta waktu (τ), dapat ditentukan
Metode penentuan FOPDT dengan model empirik terbagi lagi menjadi dua
metode, yang dijelaskan sebagai berikut.
Metode I
Metode I dilakukan sebagai berikut dan diilustrasikan pada Gambar 2.2.
1. Menghitung KP dengan persamaan:
| Flow Control 8

K P=∆δ
(2.4)
di mana ∆ adalah besar perubahan respon dan δ adalah besar perubahan input.
2. Menghitung τ dengan persamaan:
τ=∆s
(2.5)
di mana s adalah slope maksimum yang dicari dari garis singgung Process
Reaction Curve (PRC) yang paling tegak.
3. Menentukan dead time (θ) dari kurva.
Metode II
Metode III dilakukan sebagai berikut dan diilustrasikan pada Gambar 2.3.
1. Menghitung KP dengan Persamaan (2.4).
2. Menghitung τ dengan persamaan:
τ=1,5(t 63 %−t 28 %) (2.6)
di mana t63% adalah waktu yang diperlukan untuk mencapai 63% respon
maksimum dan t28% adalah waktu yang diperlukan untuk mencapai 28% respon
maksimum.
3. Menentukan dead time (θ) dengan persamaan:
θ=t28 %−τ (2.7)
| Flow Control 9

Gambar 2.2 Penentuan Konstanta gain (Kp), Dead time (θ), dan Konstanta waktu (τ)
dengan Metode I FOPDT
Gambar 2.3 Penentuan Konstanta gain (Kp), Dead time (θ), dan Konstanta waktu (τ)
dengan Metode II FOPDT
Pendekatan Orde Tinggi
Pada pendekatan orde tinggi (selain orde satu), dibutuhkan patameter-parameter lain,
seperti rise time, time to first peak, settling time, overshoot, decay ratio, dan periode
osilasi. Nilai-nilai ini ditunjukkan secara grafis pada Gambar 2.4.
| Flow Control 10

Gambar 2.4 Besaran-besaran pada Pendekatan Orde Tinggi
2.4 Algoritma Pengontrolan
2.4.1 Jenis Pengontrol
Secara umum, jenis-jenis pengontrol dapat dijelaskan sebagai berikut:
2.4.1.1 ON-OFF Controller
Sistem ini merupakan loop control yang paling sederhana. Final control
element hanya mempunyai dua keadaan operasi. Jika sinyal kesalahan positif,
controller mengirim sinyal hingga final control element (control valve) bergerak
ke salah satu posisi untuk meminimalkan kesalahan; jika sinyal kesalahan
negative, control valve akan bergerak ke posisi sebaliknya. Secara matematis,
sistem ini dapat dituliskan sebagai berikut :
u (t )=M untuk e (t)>0 (2.8)
u (t )=M untuk e (t )<0 (2.9)
Ciri khas dari sistem dengan algoritma ON-OFF adalah keluaran akan
menunjukkan nilai yang berosilasi sebelum mencapai harga set point-nya.
2.4.1.2 Pengontrol Proporsional (Proportional Controller, P Controller)
| Flow Control 11

Dalam aksi pengontrolan proporsional, alat pengoreksi akhir memiliki suatu
daerah posisi yang kontinu. Posisi tepatnya sebanding dengan besarnya kesalahan.
Dengan kata lain, output dari controller (manipulated variable) sebanding dengan
input-nya (besarnya penyimpangan atau error). Semakin besar error, semakin
besar sinyal kendali yang dihasilkan P Control. Output aktual pada controller ini
(actuating output) dirumuskan sebagai:
u (t )=KP ε (t )+us (2.10)
dengan: u(t) adalah actuating output atau manipulated variable, ε(t) adalah error,
KP adalah proportional gain dari controller, dan us adalah sinyal bias (output
aktual ketika error ε(t) = 0)
Kontroler proportional memiliki dua besaran utama, yakni proportional
gain, KP dan proportional band, PB. Kedua besaran ini dihubungkan secara
matematis:
PB=100K P
(2.11)
dengan KP adalah perubahan output/perubahan input. Dengan demikian,
proportional band adalah perbandingan antara perubahan input terhadap
perubahan output.
Dari persamaan-persamaan di atas, fungsi transfer dari P Control bisa
dibuat. Persamaan (2.10) bisa disusun ulang menjadi:
u (t )−us=KP ε (t ) (2.12)
Misalkan u(t) - us = u(t), maka berlaku:
u (t )=KP ε (t ) (2.13)
Transformasi Laplace dari persamaan di atas menghasilkan fungsi transfer
Proportional Control:
U (s )E (s )
=G p ( s )=KP (2.14)
dengan KP dikenal juga sebagai gain atau penguatan.
Keluaran P Control memiliki beberapa ciri khas, dan digambarkan pada
Gambar 2.5. Dari gambar ini, dapat dilihat bahwa:
| Flow Control 12

1. P Control akan berfungsi baik untuk sistem yang proses perubahan
bebannya secara lambat dan variasi set point-nya kecil, karena dengan
demikian proportional band-nya dapat diambil cukup kecil.
2. Tunning nilai proportional band pada angka atau keadaan tertentu akan
menghilangkan osilasi yang timbul di sekitar set point. Semakin besar
harga proportional band, maka osilasi pada output relatif tidak terjadi;
sebaliknya, semakin kecil harga proportional band, maka besar
kemungkinan osilasi terjadi (peredaman osilasi kecil).
3. Adanya offset pada hasil pengontrolannya, yakni harga setpoint tidak dapat
dicapai sesudah suatu perubahan beban terjadi. Besarnya offset ini
tergantung pada harga proportional band. Semakin besar harga
proportional band, maka akan semakin besar nilai offset; sebaliknya,
semakin kecil proportional band, maka semakin kecil nilai offset.
Gambar 2.5 Hasil Keluaran P Control
4. Dari K. Ogata, diketahui bahwa proses dinamik akan stabil jika 14/9 > KP
> 0. Perbedaan kestabilan pada saat KP bernilai 1.2 (stabil) dan bernilai 1.6
(tidak stabil) diberikan pada Gambar 2.6.
| Flow Control 13

(a)
(b)
Gambar 2.6 Plot Keluaran Terhadap Waktu pada: (a) KP = 1.2; (b) KP = 1.6
Penambahan P Control pada sistem lup tertutup memberikan pengaruh
berikut:
1. Menambah atau mengurangi kestabilan;
2. Memperbaiki respon transien, khususnya: rise time dan settling time;
3. Mengurangi (tetapi tidak menghilangkan) steady state error (SSE). Untuk
dapat menghilangkan SSE, dibutuhkan KP yang sangat besar. Hal ini akan
berakibat langsung pada penurunan kestabilan sistem.
2.4.1.3 Pengontrol Integral (Integral Controller, I Controller)
Pada I Control, perubahan sinyal kontrol sebanding dengan integral sinyal
kesalahan terhadap waktu, artinya besarnya kesalahan dikalikan dengan waktu
dimana kesalahan tersebut terjadi. Semakin besar error, semakin cepat sinyal
kontrol bertambah/berubah. Persamaan matematis untuk I Control adalah sebagai
berikut:
u (t )=K I∫0
t
ε ( t ) dt (2.15)
| Flow Control 14

di mana KI adalah konstanta integral. Transformasi Laplace dari persamaan ini
menghasilkan:
U (s )E (s )
=K I
s (2.16)
Penambahan I Control pada sistem lup tertutup memberikan pengaruh berikut:
1. Menghilangkan steady state error (SSE);
2. Memperlambat respon jika dibandingkan dengan P Control;
3. Dapat menimbulkan ketidakstabilan karena menambah orde sistem.
2.4.1.4 Pengontrol Derivatif (Derivative Controller, D Controller)
Pada pengontrol derivatif, besarnya sinyal kontrol sebanding dengan
perubahan error (Δe). Semakin cepat error berubah, semakin besar aksi kontrol
yang ditimbulkan. Dengan adanya bagian derivatif, dε/dt, kontroler PID
mengantisipasi apa yang akan terjadi pada error di masa sesaat yang akan datang
dan kemudian melakukan aksi kontrol yang sebanding dengan kecepatan
perubahan error saat ini. Berdasarkan sifat ini, aksi kontrol derivatif kadang-
kadang mengacu sebagai anticipatory control. Secara matematis dituliskan:
u (t )=K Ddεdt
+us (2.17)
Pengaruh pada D Control pada sistem adalah:
1. Memberikan efek redaman pada sistem yang berosilasi sehingga bisa
memperbesar pemberian nilai KP
2. Memperbaiki respon transien karena memberikan aksi saat ada perubahan
error.
3. D Control hanya berubah saat ada perubahan error dan saat ada error
statis D tidak beraksi. Akibatnya, D Control tidak boleh digunakan sendiri
2.4.1.5 Proportional Integral Controller (PI Controller)
Dalam aksi pengontrolan proporsional plus integral (proportional-plus-reset),
posisi alat pengoreksi akhir (control valve) ditentukan oleh dua hal:
| Flow Control 15

1. Besarnya sinyal kesalahan, yang merupakan kontribusi dari P Control.
2. Integral waktu dari sinyal kesalahan, artinya besarnya kesalahan dikalikan
dengan waktu di mana kesalahan tersebut terjadi, yang merupakan
kontribusi dari I Control.
Persamaan matematis dari PI Control adalah gabungan dari persamaan
untuk P Control dan I Control:
u (t )=KP ε (t )+KP
τ I∫0
t
ε (t ) dt +us (2.18)
dengan τI adalah konstanta integral time atau reset time dalam satuan menit.
Konstanta ini merupakan parameter yang dapat diatur dan kadang-kadang
mengacu sebagai minutes per repeat. Dalam industri yang digunakan sebagai
acuan adalah kebalikan dari konstanta waktu yang dikenal sebagai reset rate.
Ciri khas dari PI Controller adalah
1. Output (pada Gambar 2.7 adalah c(t)) berubah selama error tidak sama
dengan nol. Oleh karena sifat inilah, pengontrol ini dapat menghilangkan
error bahkan pada kondisi error yang kecil.
Gambar 2.7 Respon PI Controller Terhadap Error Berupa Step
| Flow Control 16

2. Adanya waktu reset menyebabkan output kembali ke set point. Respon
output pada nilai waktu reset yang berbeda-beda digambarkan pada
Gambar 2.8.
Gambar 2.8 Respon PI Controller Terhadap Perubahan Beban
Jenis PI controller di industri dapat menangani hampir setiap situasi
kontrol proses. Perubahan beban yang besar dan variasi yang besar pada set point
dapat dikontrol dengan baik tanpa osilasi yang berkepanjangan, tanpa offset
permanen, dan dengan cepat kembali ke keadaan seharusnya setelah gangguan
terjadi. Perbedaan keluaran menggunakan P Control saja, I Control saja, dan PI
Control diberikan pada Gambar 2.9.
(a)
(b)
(c)
| Flow Control 17

(d)
Gambar 2.9. Perbedaan Respon pada: (a) Tanpa Kontrol; (b) P Control dengan KP = 2;
(c) I Control dengan KI = 1; (d) PI Control dengan KP = 2, KI = 1
2.4.1.6 Proportional Derivative Control (PD Control)
Dalam aksi pengontrolan proporsional plus integral (proportional-plus-reset),
posisi alat pengoreksi akhir (control valve) ditentukan oleh dua hal:
1. Besarnya sinyal kesalahan, yang merupakan kontribusi dari P Control.
2. Besarnya perubahan error (Δe) terhadap waktu, yang merupakan
kontribusi D Control.
Perbedaan keluaran P Control dan PD Control diberikan pada Gambar 2.10.
(a)
(b)
Gambar 2.10 Perbedaan Respon pada: (a) P Control dengan KP = 1;
(b) PD Control dengan KP = 1, KD = 3
2.4.1.7 Pengontrol Proporsional, Integral, dan Derivatif (Proportional
Integral Derivative Control, PID Control)
| Flow Control 18

Kontroler jenis ini dikenal juga sebagai kontroler proportional-plus-reset-
plus-rate. Dalam aksi pengontrolan proporsional, integral, dan derivatif (PID
Control), posisi alat pengoreksi akhir (control valve) ditentukan oleh tiga hal:
1. Besarnya sinyal kesalahan, ini adalah bagian proporsional;
2. Integral waktu dari sinyal kesalahan, artinya besarnya kesalahan dikalikan
dengan waktu di mana kesalahan tersebut terjadi, ini adalah bagian
integral;
3. Laju perubahan kesalahan terhadap waktu. Perubahan kesalahan yang
cepat menyebabkan suatu aksi korektif yang lebih besar dari perubahan
kesalahan. Ini adalah bagian derivatif.
Output dari kontroler ini dinyatakan sebagai:
u (t )=KP ε (t )+KP
τ I∫0
t
ε (t ) d t+K P τ Ddεdt
+us
(2.19)
dengan τD adalah konstanta derivative time dalam satuan menit. Karakteristik
tambahan dengan adanya derivative control dikenal sebagai rate time (konstanta
waktu derivatif). PID Controller memiliki transfer function sebagai sebagai
berikut :
H (s )=K D s2+K P s+K I
s3+K D s2+K P s+K I
(2.20)
PID Control bisa disusun seri dan paralel. Persamaan matematis untuk
PID seri adalah:
u (t )=KP (e ( t )+ 1T i∫0
t
e (t ) dt +T d
de ( t )dt )
(2.21)
| Flow Control 19

U (s )=K P(E ( s )+ 1T i s
E (s)dt+T d sE (s))
(2.22)
U (s )=K P E (s )+K I
sE (s )dt +K D sE (s )
(2.23)
Sedangkan persamaan matematis untuk PID Paralel adalah:
u (t )=KP e ( t )+ 1T i∫
0
t
e (t ) dt+T d
de (t )dt
(2.24)
U (s )=K P E (s )+ 1T i s
E(s)dt+Td sE(s)
(2.25)
U (s )=K P E (s )+K I
sE (s )dt +K D sE (s )
(2.26)
Beberapa ciri khas dari PID Control adalah:
1. Bila pada proses kesalahannya sangat besar, maka PI Control akan
membutuhkan waktu yang panjang untuk mencapai set point-nya, tetapi
untuk PID Contrrol proses pencapaian set point lebih cepat.
2. Rate time akan berpengaruh terhadap respon controller. Rate time yang
terlalu besar mempercepat laju pencapaian set point tetapi akan
menyebabkan terjadinya osilasi di sekitar set point.
| Flow Control 20

Gambar 2.11 Respon PID Controller Terhadap Perubahan Beban dengan Variasi Rate Time
PID Control digunakan pada dua jenis proses yang sangat sulit
pengontrolannya, di mana PI Control tidak lagi memadai, yaitu: proses dengan
beban berubah dengan sangat cepat dan proses yang memiliki kelambatan yang
besar antara tindakan korektif dan hasil yang muncul dari tindakan tersebut. Aksi
PID Control memiliki beberapa kelemahan seperti berikut ini :
1. Untuk respon dengan error konstan dan tidak nol, kontroler ini tidak
memberikan aksi;
2. Untuk respon yang bergejolak dengan error yang hampir nol, kontroler ini
dapat memperoleh nilai derivatif yang besar, yang menghasilkan aksi
kontrol yang besar, meskipun seharusnya tidak diperlukan.
Walaupun memiliki kelemahan di atas, PID Control memiliki beberapa
kelebihan:
1. Mengadopsi kelebihan P Control, yaitu memperbaiki respon transien. KP
mengurangi rise time, tetapi tidak menghilangkan steady state error (SSE).
2. Mengadopsi kelebihan I Control, yaitu menghilangkan steady state error
(SSE). KI menghilangkan SSE, tetapi membuat transisent response lebih
buruk
3. Mengadopsi kelebihan D Control, yaitu memberikan efek redaman. KD
meningkatkan stabilitas sistem, mengurangi overshoot dan meningkatkan
transient response.
| Flow Control 21

Tabel 2.2 Pengaruh KP, KI, KD pada Berbagai Faktor
Closed-Loop Response Rise Time Overshoot Settling Time SS Error
KP Turun Naik Sedikit berubah Turun
KI Turun Naik Naik Dihilangkan
KD
Sedikit
berubahTurun Turun Sedikit berubah
Respon dinamik pada berbagai jenis kontrol diberikan pada Gambar 2.12.
Gambar 2.12 Respon Dinamik Berbagai Jenis Pengontrol
2.4.2 Tunning PID Control
Permasalahan terbesar dalam desain PID Control adalah tunning atau
menentukan nilai KI, KP, dan KD. Metode-metode tunning dilakukan berdasarkan
model matematika plant/sistem. Jika model tidak diketahui, dilakukan eksperimen
terhadap sistem Dua cara tunning kontroler PID yang paling populer adalah
Metode Ziegler-Nichols I dan II. Metode Ziegler-Nichols dilakukan dengan
eksperimen (asumsi model belum diketahui) dan bertujuan untuk pencapaian
maximum overshoot (MO) adalah 25 % terhadap masukan step
2.4.2.1 Metode Tunning Ziegler-Nichols I
| Flow Control 22

Metode ini dilakukan berdasar eksperimen dengan memberikan input step
pada sistem, dan mengamati hasilnya. Metode ini dapat diterapkan asalkan syarat
berikut terpenuhi:
1. Sistem harus mempunyai respons terhadap step berbentuk kurva S;
2. Sistem tidak mempunyai integrator (1/s);
3. Sistem tidak mempunyai pasangan pole kompleks dominan (misal: j dan -
j, 2j dan -2j);
4. Muncul dari persamaan karakteristik, seperti s2+1 dan s2+4;
5. Respon sistem berosilasi.
Prosedur praktis metode ini adalah sebagai berikut:
1. Memberikan input step pada sistem untuk mendapatkan kurva respons
berbentuk S
2. Menentukan nilai L dan T seperti pada Gambar 2.13.
Gambar 2.13 Penentuan L dan T pada Metode Ziegler-Nichols I
3. Memasukkan nilai L dan T ke Tabel 2.3 untuk mendapatkan nilai KP, τI,
dan τD
Tabel 2.3 Penentuan Nilai KP, τI, dan τD pada Metode Ziegler-Nichols I
Tipe alat KP τI τD
| Flow Control 23

kontrol
P T/L 0
PI 0.9T/L L/0.3 0
PID 1.2T/L 2L 0.5L
2.4.2.2 Metode Tunning Ziegler-Nichols II
Metode ini berguna untuk sistem yang mungkin mempunyai step response
berosilasi terus menerus dengan teratur. Metode ini dilakukan pada sistem dengan
integrator (1/s). Prosedur praktis metode ini adalah sebagai berikut:
1. Membuat suatu sistem lup tertutup dengan P Control dan plant di
dalamnya;
2. Menambahkan nilai KP sampai sistem berosilasi berkesinambungan.
Keadaan ini disebut keadaan kritis;
3. Mendapatkan responnya dan tentukan nilai penguatan kritis, Kcr, dan
periode kritis, Pcr seperti pada Gambar 2.14.
Gambar 2.14 Penentuan Kcr dan Pcr pada Metode Ziegler-Nichols II
4. Menentukan nilai KP, τI, dan τD berdasarkan tabel berikut.
Tabel 2.4 Penentuan Nilai KP, τI, dan τD pada Metode Ziegler-Nichols II
Tipe alat kontrol KP τI τD
| Flow Control 24

P 0.5 Kcr 0
PI 0.45 Kcr Pcr/1.2 0
PID 0.6 Kcr 0.5 Pcr 0.125 Pcr
| Flow Control 25

Ya
Tidak
BAB III
Metodologi
3.1 Alur Penelitian
Percobaan I: Karakteristik Statik Dan Step Respons Proses Melalui Pendekatan First-
Order-Plus-Dead Time (FOPDT)
| Flow Control 26
Start-up alat flow control dan melakukan persiapan awal
Mengubah posisi controller menjadi manual
- Mengamati output yang tercatat pada printer- Mencatat P, I, D pada sistem- Mencatat step input atau bukaan valve- Menentukan kecepatan kertas pada printer.
Mengatur laju alir bejana (PV) pada 400 l/jam
Mengubah SV menjadi 375 l/jam sehingga terjadi perubahan input dari bukaan valve
Sudah stabil?
Mengubah posisi controller menjadi otomatis

Gambar 3.2 Alur Kerja Percobaan II
Gambar 3.1. Alur Kerja Percobaan I
Percobaan II: Penentuan Pengaruh P arameter Proporsional, P , I ntegral T ime , τ I, dan
D erivative T ime , τ I, untuk P Control, PI Control, dan PID Control
| Flow Control 27
Start-up alat flow control dan melakukan persiapan awal
Mengubah posisi controller menjadi otomatis
Mengatur nilai P, I, dan D sesuai dengan Metode Ziegler-Nichols
Mengatur P, I, D dengan nilai pada Tabel Ziegler-
Nichols
Mengatur D = 0, P dan I tetap (PI Control)
Mengatur D = 0, I = maksimum, dan P tetap (P
Control)
- Mengamati output yang tercatat pada printer- Menentukan kecepatan kertas pada printer.
Mengatur laju alir bejana (PV) pada 400 l/jam
Mengubah SV menjadi 375 l/jam sehingga terjadi perubahan input dari bukaan valve

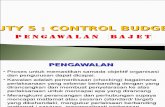
3.2 Alat dan Bahan Percobaan
Peralatan yang digunakan dalam percobaan adalah sebagai berikut:
1) Controller, digunakan untuk mengatur variabel-variabel yang terkait dengan
percobaan, termasuk mengatur karakteristik PID control.
Gambar 3.3. Unit Controller: Tampak Depan (Kiri), Tampak Samping (Kanan)
| Flow Control 28

Gambar 3.4. Skema Alat Controller.
2) Control Valve, berfungsi sebagai elemen kontrol akhir dalam sistem pengendalian.
Besarnya bukaan valve diatur pada controller. Berfungsi untuk mengatur laju alir
yang masuk ke dalam sistem. Valve tergabung dalam alat yang bernama orifice.
Dalam percobaan ini, digunakan valve jenis Fail Open/ Air to Close, dimana
semakin besar bukaan, semakin kecil laju alir fluida yang melaluinya.
3) Wadah atau tangki air (reservoir air), tempat dimana air yang ditampung, sesuai
modul diisi sebanyak 80% dari total daya tampung tangki
4) Sensor, yaitu alat yang berfungsi untuk mengubah laju alir output yang terbaca
menjadi sinyal elektrik, sehingga terbaca pada controller dan memungkinkan untuk
dilakukannya feedback control.
| Flow Control 29

Gambar 3.5. Sensor yang digunakan pada Alat Flow Control
5) Printer, berfungsi sebagai pencatat output dari proses. Hasil dari printer inilah yang
digunakan sebagai bahan pengolahan data.
Gambar 3.6. Printer pada Alat Flow Control yang Digunakan.
Range Pembacaan Laju alir Berada Antara 0-500 l/jam
6) Needle valve, berfungsi sebagai input disturbance variable (DV) ke dalam proses.
Berguna untuk mengamati perilaku gangguan terhadap proses.
Berikut adalah gambar atau skema dari keseluruhan alat flow control.
| Flow Control 30

Gambar 3.7. Skema Alat Flow Control
3.3 Prosedur Percobaan
3.3.1 Persiapan Percobaan
Sebelum dilakukan percobaan, alat flow control yang akan digunakan harus
disiapkan terlebih dahulu. Langkah-langkahnya:
1. Perhatikan dengan seksama model print “Flow Rate”.
2. Isi reservoir air sekitar 80% ketinggian.
3. Jalankan kompresor udara dengan meng “on” kan sumber listrik.
4. Set tekanan udara untuk instrument sehingga pengukurannya sampai 1,4
kg/cm2g.
5. Buka penuh katup penutup (stop valve) 3 dan 5 serta katup jarum (needle
valve) 2. Tutup semua katup yang lain.
6. Set controller pada posisi “manual” dan buka penuh katup pengatur
(control valve).
| Flow Control 31

7. Jalankan pompa dengan memindahkan ke posisi “on” pada panel.
8. Hilangkan udara yang masuk ke transmitter dengan mengatur katup
keseimbangan A dan A’.
9. Atur katup jarum dan katup pengatur sehingga pencatat (recorder)
menunjukkan 400 l/jam.
10. Petunjuk pengoperasian controller:
a. Set penunjuk ke mode “M” sebelum meng “on” kan sumber listrik
untuk instrumentasi.
b. Operasi Manual (M):
1. Set penunjuk ke mode “M” lampu M akan menyala.
2. Set harga SV dengan menekan knop SV atau dengan
menggunakan “data entry unit”.
3. Untuk memperoleh nilai MV yang tepat, tekan knop
yang terdapat di depan panel, maka nilai SV dapat dipakai
untuk membaca nilai MV (nilai MV dapat dibaca pula pada
“data entry unit”).
c. Operasi Otomatis:
1. Jika set penunjuk pada posisi A, lampu A akan
menyala.
2. Set SV sebagaimana yang dilakukan pada operasi
manual.
3. Set nilai PID controller dengan menggunakan “data
entry unit” sehingga karakteristik proses ini dapat
diketahui.
4. Jika nilai PID tidak diketahui, maka set P dan I pada
nilai maksimumnya dan D pada nol, atau biarkan
sebagaimana adanya sebelum di set ke automatic.
5. Set penunjuk controller ke posisi A.
6. Nilai-nilai optimum PID dapat ditentukan dengan
metode Ziegler – Nichols.
| Flow Control 32

3.3.2 Karakteristik Sistem Yang Dikontrol Dengan Pendekatan FOPDT
Catat harga-harga konstanta PID sebelum melakukan percobaan.
1. Percobaan karakteristik statik:
a. Lakukan persiapan sebagaimana dijelaskan pada 3.3.1.
b. Set controller ke posisi otomatis.
c. Set controller pada 375, 400, 425 l/jam. Catat keluaran (output)
control pada pengontrol setelah stabil – dalam %.
2. Percobaan karakteristik “step response” dengan menggunakan
“Manipulated Variable” – MV sebagai masukan.
a. Lakukan persiapan sebagaimana 3.3.1.
b. Tekan knop katup pengatur – MV untuk memperoleh bukaan katup
yang tiba-tiba.
c. Catat perubahan laju aliran yang terjadi pada saat itu (dengan
recorder/dari entry data unit) sampai keadan stabil.
3. Percobaan karakteristik step response dengan gangguan sebagai masukan.
a. Persiapkan kembali percobaan 3.3.1.
b. Putar katup jarum untuk memperoleh laju alir yang berbeda.
c. Catat perubahan laju aliran pada recorder/data entry unit sampai
keadaan stabil.
d. Percobaan ini tidak meliputi “time lag” dari peralatan akhir control
tersebut.
3.3.3 Metode Pengaturan Optimum Ziegler-Nichols
Metode ini digunakan untuk menentukan harga pengaturan optimum didasarkan
pada data cycling dari system, caranya:
1. Set “Integral Time” ke harga maksimum (Ti).
2. Set “Derivative Time” ke harga minimum (Td).
3. Secara perlahan-lahan kurangi “Proportional Band” sampai mulai terjadi
cycling yang ditunjukkan pada recorder atau meteran tekanan udara.
| Flow Control 33

Harga ini dibagikan terhadap angka 100, maka hasilnya disebut sebagai
sensitifitas optimum (Ku). Ku = 100/PB
4. Hitung juga periode cycling (Pu) dengan menggunakan stop watch.
5. Konstanta PID optimum dapat dihitung dengan menggunakan tabel ini.
Kp Ti Td
P Action 0,5 Ku - -
PI Action 0,45 Ku 0,83 Pu -
PID Action 0,6 Ku 0,5 Pu 0,125 Pu
3.3.4. Pembandingan Kontrol PID, PI, dan P action
Pada percobaan ini, akan dilakukan pembandingan antara kontrol parameter P, I,
dan D. Dalam hal ini akan digunakan parameter-parameter yang telah didapatkan
pada kontrol PID optimum, menurut :
Kp Ti Td
P Action 0,6 Ku 327.6* 0**
PI Action 0,6 Ku 0,5 Pu 0**
PID Action 0,6 Ku 0,5 Pu 0,125 Pu
Keterangan:* Nilai ini adalah nilai maksimum integral time alat;** Nilai ini adalah nilai minimum derivative time alat.
1. Masukkan harga P, I, D sesuai dengan P action, PI action dan PID action
yang sudah dihitung di atas.
2. Untuk masing-masing jenis kontrol, lakukan step input, dengan cara
memasukkan nilai SV tertentu.
3. Perhatikan hasil pada grafik, terutama perbedaan antara ketiga kontrol.
4. Analisis, lalu simpulkan perbedaan karakteristik kontrol P, I, dan D,
melalui analisis hasil ketiga kontrol di atas.
| Flow Control 34

BAB IV
HASIL & PEMBAHASAN
Pada percobaan ini, dilakukan beberapa pengamatan, maka data yang diperoleh pun
harus diolah secara bertahap untuk mencapai tujuan yang diinginkan, berikut proses
pengolahan data yang dilakukan :
4.1. Karakteristik Statis Dalam Sistem Kontrol
Pada tahap ini akan dilakukan analisa terhadap data yang diperoleh dari percobaan
pertama yang dilakukan yaitu mengatur controller menjadi manual dan kemudian
mengatur katup jarum dan katup pengatur sehingga diperoleh keluaran (Process value)
sebesar 400 L/jam dan kemudian biarkan sistem hingga stabil. Setelah sistem stabil,
ubah nilai set value (SV) menjadi sebesar 375 L/s dan biarkan hingga nilai PV
(Process Value) memiliki nilai yang sama dengan nilai set value (SV). Lalu diamati
nilai Manipulated Value (MV) pada saat keadaan stabil pada nilai PV 400 L/s dan pada
nilai PV = SV = 375 L/s, diperoleh nilai :
PV = 400 L/s MV = 45%
PV = SV = 375 L/s MV = 71,1%
Kemudian setelah diperoleh nilai MV pada masing-masing bukaan, controller
diubah ke penunjuk otomatis (auto) pada nilai SV = 375 L/jam, kemudian dilihat
bagaimana nilai MV tercapai yaitu nilai bukaan valve yang menggambarkan laju alir
sistem. Ternyata diperoleh nilai MV = 70%, maka nilai inilah yang kemudian
digunakan untuk mengolah data selanjutnya, hal tersebut dikarenakan sistem dianggap
lebih stabil pada saat keadaan controller pada keadaan auto. Berdasarkan hasil yang
diperoleh, maka dapat diamati perubahan kondisi controller pada saat manual dan auto
melalui gambar berikut :
| Flow Control 35

Gambar 4.1. Karakteristik kontrol manual
Gambar 4.2. Karakteristik kontrol otomatis (auto)
Berdasarkan kedua gambar tersebut, maka dapat dilihat adanya perbedaan
karakteristik pada kedua kondisi kontrol di atas, yaitu :
Pada saat sistem kontrol manual, hasil yang diperoleh terlihat lebih agak
fluktuatif karena adanya kontur yang kasar pada grafik yang diperoleh.
Pada saat sistem kontrol otomatis, hasil yang diperoleh terlihat lebih halus dan
lebih landai daripada sistem kontrol manual.
Kemudian setelah diamati kondisi karakteristik kontrol dengan dua kondisi
tersebut, maka langkah selanjutnya adalah pengamatan terhadap pemberian step
response atau pemberian jarak nilai SV yang cukup besar sehingga terlihat adanya
jangka waktu tertentu pada grafik yang diperoleh. Pada langkah ini, nilai SV diatur
terlebih dahulu menjadi nilai 400 L/jam terlebih dahulu dan diperoleh nilai MV sebesar
45 %, kemudian diinginkan nilai MV sebesar 90%, maka nilai MV pun dimasukkan
sebesar 90%, kemudian diperhatikan nilai PV yang terjadi, di mana diperoleh nilai PV
sebesar 368 L/jam. Hasil yang diperoleh yaitu :
| Flow Control 36

Gambar 4.3. Karakteristik sistem kontrol dengan diberikan step input
Setelah sistem diamati pada kondisi pemberian step input tersebut, maka langkah
selanjutnya adalah memperhatikan pengaruh pemberian variabel pengganggu
(Disturbance Variable) pada sistem kontrol. Sebelum nilai variabel pengganggu
dilakukan, sistem dikembalikan ke kondisi awal yaitu pada saat PV = 400. Pemberian
DV (Disturbance Variable) ini dilakukan dengan memutar needle valve ke arah
menutup valve sehingga bukaan dari valve tersebut menjadi berkurang. Setelah
dimasukkannya faktor variabel pengganggu tersebut, maka hasil yang diperoleh adalah
sebagai berikut :
Gambar 4.4. Karakteristik sistem kontrol dengan diberikan Disturbance Variable
Berdasarkan gambar tersebut, maka dapat dilihat adanya perubahan pada nilai PV
dengan diberikannya faktor pengganggu tersebut.
Langkah selanjutnya adalah membuat model dari hasil yang telah diperoleh. Untuk
dapat membuat model tersebut, maka perlu ditentukan terlebih dahulu nilai PV0
sebagai nilai awal dari sistem dan nilai PVakhir dari sistem untuk dapat melihat
bagaimana karakteristik sistem dan metode pendekatan manakah yang dapat digunakan
untuk membuat model sistem. Berdasarkan percobaan sebelumnya, maka ditetapkan
nilai PV0 adalah 375 L/jam dan PVakhir adalah 420 L/jam, penetapan tersebut dilakukan
| Flow Control 37

agar semua data yang telah diperoleh sebelumnya tercakup di dalam suatu rentang PV
yang ditetapkan tersebut. Berikut hasil yang diperoleh dari pengaturan nilai SV untuk
memperoleh nilai PV0 dan nilai PVakhir tersebut :
Gambar 4.5. Hasil penetapan nilai PV0 dan PVakhir
Melihat gambar yang telah diperoleh, dapa dilihat sistem memiliki faktor waktu tunda
atau dead time dan juga sistem memiliki konstanta statis dalam proses berdasarkan
grafik yang diperoleh, maka sistem dapat dibuat pemodelan persamaan alihnya dengan
menggunakan pendekatan FOPDT (First Order Plus Dead Time) yang
menggambarkan bahwa sistem merupakan sistem berorde satu. Langkah awal
membuat pemodelan persamaan fungsi alih adalah menggambarkan respon laju alir
yang telah diperoleh pada percobaan dengan persamaan FOPDT yaitu :
PV (s )MV (s )
=Ke−θ s
τs+1=
p (s )v (s)
(4.1)
di mana PV(s) adalah process variable atau process value (pada eksperimen adalah laju
alir, p(s) adalah fungsi alih laju alir atau proses, MV(s) adalah manipulated variable
atau manipulated value (pada eksperimen adalah bukaan valve yang menggambarkan
perubahan laju alir), v(s), yang dinyatakan dalam persentase atau nilai tak berdimensi
dan semua variabel tersebut dinyatakan dalam domain transformasi Laplace. Dengan
menggunakan Metode II dari Pendekatan FOPDT, nilai gain atau konstanta statis
proses, K, dapat dihitung sebagai:
| Flow Control 38

K=Gain=Δ p(t )Δv ( t)
= peruba han darilaju aliranperubahandari bukaankatup
(4.2)
¿(0,42−0,375 ) L/ jam
(0,178−0.70 )=−0,08621 L / jam
Karena kecepatan printer adalah 10 mm/menit (0,167 mm/s), maka konstanta waktu, τ ,
dapat dihitung sebagai:
t 63%= 5,67 mm0,167 mm/ s
=33,9521 s ≈ 34 s
t 28%= 2,52 mm0,167 mm/ s
=15,0898 s≈ 15 s
τ=1,5(t 63 %−t 28 %) (4.3)
¿1,5 (t 63%−t 28% )=1,5 (34−15 ) s=28,5 s
Sedangkan dead time, θ, dihitung sebagai:
θ=t63 %−τ (4.4)
¿34−28,5=5,5 s
Dengan memasukkan besaran-besaran yang dihitung pada Persamaan (4.1), diperoleh:
PV (s )MV (s )
=p(s)v (s )
=−0,08621 e−5,5s
28,5 s+1 (4.5)
Pada eksperimen, v(t) = 0.178 – 0.70 = -0.522 (step input). Hasil Transformasi Laplace
dari v(t) adalah -0.522/s, sehingga Persamaan (4.5) menjadi:
p (s )=−0,08621 e−5,5s
28,5 s+1×−0.522
s= 0,045 e−5,5s
s (28,5 s+1) (4.6)
Invers Transformasi Laplace dari p(s) menghasilkan p(t). Karena p(0) = PV0 = 0.375
kgf/cm2, maka hasil invers adalah:
p (t )=0.375+0.045¿)
(4.7)
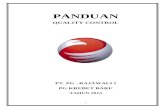
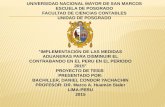
di mana t dinyatakan dalam detik dan p dalam kgf/cm2. Kemudian persamaan fungsi
alih tersebut menjadi dasar dalam pembuatan grafik untuk melakukan perbandingan
terhadap hasil ekesperimen dengan hasil teoritis, yaitu sebagai berikut :
| Flow Control 39

0 50 100 150 200 250 300 350 400 4500.33
0.34
0.35
0.36
0.37
0.38
0.39
0.4
0.41
0.42
0.43
pendekatan FOPDTeksperimen
t (s)
p (k
gf/c
m2)
Gambar 4.6. Grafik hubungan hasil eksperimen dan hasil pemodelan
Berdasarkan hasil yang diperoleh tersebut, maka dapat dilihat bahwa pendekatan
yang dilakukan dalam membuat fingsi alih yaitu pendekatan FOPDT dapat dikatakan
sebagai langkah pendekatan yang sesuai dengan sistem, di mana hasil yang diperoleh
sesuai dengan model dengan tingkat ketelitian yang cukup tinggi.
4.2. Penentuan Parameter Proporsional, P, Integral Time, τI, dan Derivative Time, τD,
untuk P Control, PI Control, dan PID Control
Pada tahap ini, praktikan diminta untuk menentukan bagaimana nilai pengontrolan
yang baik dengan menggunakan Tunning PID, di mana dalam hal ini, parameter yang
dijadikan sistem kontrol adalah P (proporsional), I (Integral Time), dan D (Derivative
Time). Langkah yang dilakukan adalah mengembalikan kondisi sistem pada nilai SV
sebesar 400 L/jam terlebih dahulu, kemudian dibiarkan hingga sistem stabil terlebih
dahulu. Setelah itu dilakukan pengamatan terhadap nilai parameter awal P, I, dan D.
Setelah diamati, diperoleh nilai parameter awal yaitu :
P sebesar 76,0
I sebesar 6,0
D sebesar 0,0
| Flow Control 40

Kemudian langkah selanjutnya adalah mengubah nilai parameter I menjadi
maksimum, di mana berdasarkan literatur yang ada, nilai maksimum parameter I
adalah 327,6 dan nilai parameter D tetap dibiarkan minimum yaitu 0,0. Kemudian
setelah dilakukan pengubahan terhadap parameter I tersebut, maka dilakukan
pengontrolan terhadap parameter P dengan mengubahnya perlahan-lahan hingga
diperoleh perubahan yang terlihat. Setelah dilakukan pengontrolan terhadap P, terlihat
adanya perubahan pada nilai parameter P sebesar 5,0. Berikut hasil yang diperoleh :
Gambar 4.7. Pengaturan parameter P
Berdasarkan hasil yang diperoleh, terlihat perubahan yang terjadi adalah terjadinya
osilasi yang cukup stabil. Hasil inilah yang menentukan penggunaan metode penentuan
nilai parameter P, I, dan D pada sistem kontrol selanjutnya. Berdasarkan hasil yang
diperoleh, di mana perubahan yang terjadi adalah sistem yang berosilasi, maka
digunakanlah metode Ziegler Nichols. Berdasarkan hasil tersebut, maka nilai
parameter P = 5,0 dapat dijadikan sebagai nilai yang cukup proporsional dalam
membuat sistem kontrol sehingga dapat dijadikan sebagai variabel Proportional Band
(PB). Maka proses perhitungan dengan metode Ziegler Nichols pun dapat mulai
dilakukan, di mana langkah awal yang dilakukan adalah mencari hubungan PB dan KP
yang dapat dicari dengan persamaan berikut :
K P=1005,0
=20,0 (4.8)
| Flow Control 41

Kemudian variabel berikutnya adalah variabel periode osilasi pada saat parameter
P=5,0 yang dihitung dengan periode dari jarum penunjuk pada orifice plates untuk
menempuh satu gelombang yang diperoleh sebesar 3.27 s. Pada saat ini, nilai KP dan P
disebut berada pada keadaan kritis, Ku dan Pu. Setelah nilai Ku dan Pu diketahui, nilai
parameter PB, τI, dan τD untuk algoritma PID dapat dituliskan pada Tabel 4.1. Pada
tabel, juga dimasukkan variasi untuk PI dan P Control pada percobaan yang diperoleh
berdasarkan metode Ziegler Nichols II yaitu :
Tabel 4.1 Penentuan Parameter KP, τI, dan τD pada Metode Ziegler-Nichols II
Kp τI τD
P action 0.5 Pu = 10 327.6* 0**
PI action 0.45 Ku = 9 0.83 Pu =2.7141 0**
PID action 0.6 Ku = 12 0.5 Pu = 1.635 0.125 Pu = 0.40875
Keterangan:* Nilai ini adalah nilai maksimum integral time alat;** Nilai ini adalah nilai minimum derivative time alat.
Nilai parameter-parameter tersebutlah yang akan digunakan untuk melakukan kontrol
pada sistem, di mana nilai parameter pada tipe PID yang akan digunakan pada tahap
percobaan selanjutnya. Berikut parameter-parameter KP, τI, dan τD yang akan
digunakan pada tahap selanjutnya :
Tabel 4.2. Parameter-parameter KP, τI, dan τD untuk perbandingan kontrol PID, PI, dan P.
Ku 20,0
Pu (s) 3.27
Tipe alat kontrol KP PB τI τD
PID 0.6 Ku = 12 5,0 0.5 Pu = 1.635 0.125 Pu = 0.40875
PI 12 5,0 1.635 0**
P 12 5,0 327,6* 0**
Keterangan:* Nilai ini adalah nilai maksimum integral time alat;
| Flow Control 42

** Nilai ini adalah nilai minimum derivative time alat.
4.3. Penentuan Pengaruh Parameter Proporsional, P, Integral Time, τI, dan
Derivative Time, τI, untuk P Control, PI Control, dan PID Control
Pada percobaan ini, untuk melakukan uji coba PID, PI, dan P, kami hanya
melakukan set SV di daerah 0,35 L/s dan 0,42 L/s. Dengan data konstanta PID dan dari
percobaan sebelumnya, kami melakukan uji PID ini untuk melihat pengaruh dari
masing-masing control. Parameter yang disertakan adalah decay ratio, overshoot,
settling time, dan offset.
Gambar 4.8. Cara menghitung Decay Ratio, Overshoot, dan Settling Time dari pembacaan grafik.
Dari gambar di atas, kita bisa mengetahui bagaimana cara menghitung overshoot,
settling time, dan decay ratio.
| Flow Control 43

Gambar 4.9. Grafik kontrol PID
Gambar 4.10. Grafik kontrol PI
Gambar 4.11. Grafik kontrol P
Berikut disajikan tabel perhitungan untuk masing-masing jenis kontrol untuk
membandingkan karakteristik masing-masing parameter :
Tabel 4.3. Perhitungan Decay Ratio, Settling Time, Overshoot, dan Offset dengan pada control PID, PI, dan P.
Besaran Jenis Kontrol
PID PI P
Decay Ratio mendekati nol 0.08 cm0.11cm
=0.730.05 cm0.11cm
=0.45
| Flow Control 44

Settling Time 2.510/60
=15 s3
10/60=18 s
110/60
=6 s
Overshoot 1 mm9 mm
=0.1111.1 mm8.5 mm
=0.1291.1mm12mm
=0.092
Offset - - 0.025 L/jamBerikut hasil yang didapatkan :
Tabel 4.4. Hasil Perhitungan Decay Ratio, Settling Time, Overshoot, dan Offset dengan pada control PID, PI,
dan P.
BesaranKontrol
PID PI P
Decay Ratio Mendekati nol
0.73 0.45
Settling Time 15 18 6Overshoot 0.111 0.129 0.092
Offset - - 0.025
Pembahasan
Menurut hasil yang kami dapatkan, nilai Decay ratio yang paling baik adalah pada
uji PID, karena didapati pada grafik nilainya hampir berharga nol, semakin kecil decay
ratio semakin baik, yang berarti semakin cepat keadaannya stabil. Pada nilai settling time,
pada tabel ditunjukan bahwa penghilangan I akan berpengaruh pada lamanya settling time.
Pada uji P saja, nilai settling time yang kami dami dapat sudah baik. Nilai settling time ini
akan mengecil jika dilakukan kontrol D. Pada bagian overshoot, nilai yang paling baik
adalah nilai dari uji PID, karena kami mendapati niliat overshoot yang paling kecil, yang
juga menandakan kestabilan jalannya proses.
Kami juga melakukan uji P dengan set value yang berbeda-beda. Hasil yang kami
dapatkan adalah seperti gambar di bawah ini. Kami mendapatkan steady state error, dimana
nilai PV yang kami dapat tidak sesuai dengan set value yang kami sudah tetapkan.
| Flow Control 45

Gambar 4.4. Hasil uji P dengan nilai step input yang berbeda-beda.
Gambar diatas menunjukan steady state error yang kami dapatkan saat nilai set
value yang kami tetapkan tidak besar. Misalnya saja kami memasukan set value 375 L/jam
dari keadaan awal 430 L/jam, dan akan didapatkan error tersebut. Pada bagian paling kanan
pada gambar di atas, tidak terjadi steady state error. Hal ini disebabkan oleh nilai set value
yang kami tetapkan sebesar 350 L/jam. Menurut analisa kami, pada uji P ini tidak akan
terjadi steady state error jika step input yang dimasukan lebih tinggi dan lebih besar dari
kemampuan sistem untuk mencapainya. Oleh karena itu kami bisa mendapatkan data uji P
yang kami gunakan dalam pengolahan data, walaupun terjadi offset sebesar 25L/jam.
Dalam hal ini,dapat disimpulkan bahwa pengaruh masing-masing kontrol P, I, dan
D berdasarkan hasil percobaan adalah sebagai berikut:
Pengaruh P pada percobaan ini tidak dapat diamati karena kami tidak
merubah variariabel kontrol P.
Pengaruh I adalah mengurangi decay ratio dan menghilangkan steady state
error. I juga menambahkan overshoot dan menambahkan settling time, serta
menghilangkan offset.
Pengaruh D adalah mempercepat settling time dan menurunkan overshoot.
Menurut analisa hasil percobaan kelompok kami, control yang paling baik adalah
control PID, karena beberapa hal di bawah ini:
Nilai decay ratio dan overshoot minimal. Hal ini menunjukan bahwa control ini
berdampak kea rah system yang lebih stabil.
| Flow Control 46

Settling time tidak besar, berarti tidak membutuhkan waktu lama untuk mencapai
keaddaan steady state.
Tidak terdapat offset, nilai set value bisa dicapai.
4.4. Penentuan Fungsi Ahli Sistem Kendali Flow Control
Bentuk dari diagram blok yang menggambarkan sistem kontrol yang dilakukan
adalah sebagai berikut :
Keterangan :
Variabel :
- SP(s) = set point set value
- E(s) = input yang masuk pada controller (Error)
- MV(s) = Manipulated variable laju alir memasuki reservoir (representasi : bukaan valve)
- CV (s) = Controlled variable laju alir keluar reservoir pompa
- CVm (s) = Measured value of controlled variable
- D (s) = Disturbance needle valve
- Gc (s) = Controller
- Gv (s) = Valve
- Gp (s) = Reservoir dan pompa
- Gd (s) = Needle valve
- Gs (s) = sensor (pengukur laju alir) orifice plates
Gambar 4.13. Diagram blok untuk flow control
Dari gambar di atas, dapat dibuat suatu fungsi ahli untuk sistem secara keseluruhan :
Respon sistem terhadap gangguan, tanpa adanya error atau set point (SP =0) :
| Flow Control 47

CV D (s )D(s)
=G d
1+G p ( s) Gv (s )G c (s ) Gs (s )
Respon sistem terhadap error atau set point, tanpa adanya gangguan :
CV R (s )SP(s)
=G p (s ) Gv (s )Gc (s )
1+G p ( s) Gv (s )G c (s ) Gs (s )
Total respon dari sistem adalah penjumlahan dari keduanya :
CV =CV D +CV R
CV =G d D (s)
1+G p ( s )G v (s ) Gc ( s) Gs (s )+
G p (s )G v ( s ) Gc ( s ) SP(s)1+G p (s ) Gv ( s )Gc (s )G s ( s )
CV = 11+Gp ( s )G v (s ) Gc ( s) Gs (s ) (Gd D(s )+G p ( s) Gv (s )G c (s ) SP (s))
Bila G p (s )G v ( s )Gc (s )≫1, maka CV D (s )
D(s)≈ 0, sehingga pengaruh gangguan dapat ditekan.
| Flow Control 48

BAB V
PENUTUP (KESIMPULAN)
Berdasarkan percobaan yang telah dilakukan, terdapat beberapa hal yang dapat
disimpulkan, antara lain :
1. Pada suatu sistem kontrol, kontrol secara manual akan menghasilkan respon cepat,
namun tidak stabil, sedangkan kontrol secara otomatis akan menghasilkan respon
yang lebih lambat, namun lebih stabil.
2. Secara umum, ada 2 variabel yang bisa menjadi input terhadap sistem kontrol, yaitu
manipulated variable (MV) dan disturbances variable (DV).
3. Fungsi dari sistem flow control yang dilakukan dapat diasumsikan memenuhi
pendekatan first order plus dead time (FOPDT).
4. Berdasarkan percobaan, fungsi FOPDT yang didapat adalah :
p (t )=0.375+0.045 (1−e5,5−t28,5 )
5. Pada setiap sistem kontrol, khususnya sistem kendali otomatis terdapat suatu
kondisi optimum berkaitan dengan tunning parameter-parameter kendali
proportional, integrative, dan derivative. Dalam hal ini, terdapat berbagai tunning
yang sering digunakan, salah satunya adalah tunning Ziegler-Nichols II yang
digunakan pada percobaan ini.
6. Berdasarkan tunning Zieger-Nichols II, didapatkan kondisi tunning optimum
sebagai berikut :
Kp τI τD
P action 10 327.6* 0**
PI action 9 2.7141 0**
PID action 12 1.635 0.40875
Keterangan:* Nilai ini adalah nilai maksimum integral time alat;** Nilai ini adalah nilai minimum derivative time alat.
| Flow Control 49

7. Berdasarkan percobaan yang dilakukan, disimpulkan bahwa setiap parameter
kendali I, dan D mempunyai karakteristik masing-masing dalam mengontrol proses,
yaitu :
Pengaruh I adalah mengurangi decay ratio dan menghilangkan steady state
error. I juga menambahkan overshoot dan menambahkan settling time, serta
menghilangkan offset.
Pengaruh D adalah mempercepat settling time dan menurunkan overshoot.
8. Berdasarkan percobaan, diketahui bahwa jenis tunning yang terbaik adalah jenis
tunning PID.
9. Fungsi ahli untuk kasus flow control adalah sebagai berikut :
CV = 11+G p ( s )G v (s ) Gc ( s) Gs (s ) (Gd D(s )+G p ( s) Gv (s )G c (s ) SP (s))
| Flow Control 50

DAFTAR PUSTAKA
Marlin, Thomas E. 2000. Process Control: Designing Processes and Control Systems for
Dynamic Performance, 2nd Editon. Boston: McGraw Hill.
Setiawan, Iwan. 2006. Kontrol PID Untuk Proses Industri. Jakarta: PT. Elex Media
Komputindo.
Tim Dosen Departemen Teknik Gas dan Petrokimia Universitas Indonesia . 1995. Petunjuk
Praktikum Proses dan Operasi Teknik II. Depok: Teknik Gas dan Petrokimia
Universitas Indonesia.
Wahid, Abdul dan Rudy Gunawan. Metode Korelasi Baru Pada Penyetelan Pengendali
PID Dengan Metode Pendekatan Model Empirik FOPDT
(staff.ui.ac.id/internal/132137844/publikasi/sntpk7-tuningpid.pdf) diakses pada 22
Desember 2011.
| Flow Control 51