AKTUATOR_MEKANIK
44
Sistem Penggerak Mekanik Sistim mekanis adalah alat yang dapat memberi perubahan gerakan menjadi gerakan satu ke gerakan lain. Seperti contoh gerakan linier menjadi gerakan rotasi atau sebaliknya. Elemen mesin dapat mencakup pada penggunaan link/pertalian, roda (cams), gigi (gears), rack dan pinion, rantai, belt, dan lain-lain.
-
Upload
rahman-sonowijoyo -
Category
Documents
-
view
65 -
download
9
description
AKTUATOR_MEKANIK T MESIN POLMED
Transcript of AKTUATOR_MEKANIK

Sistem Penggerak Mekanik
Sistim mekanis adalah alat yang dapat memberi perubahan gerakan menjadi gerakan satu ke gerakan lain. Seperti contoh gerakan linier menjadi gerakan rotasi atau sebaliknya. Elemen mesin dapat mencakup pada penggunaan link/pertalian, roda (cams), gigi (gears), rack dan pinion, rantai, belt, dan lain-lain.

DASAR RODA GIGI TRANSMISI(Basic Transmission Gear)
1. Transmisi daya ( Power transmission)
Transmisi daya adalah upaya untuk menyalurkan/memindahkan daya dari sumber daya (motor diesel,bensin,turbin gas, motor listrik dll) ke mesin yang membutuhkan daya ( mesin bubut, pumpa, kompresor, mesin produksi dll).
Ada dua klasifikasi pada transmisi daya : 1. Transmisi daya dengan gesekan
( transmission of friction) :a. Direct transmission: roda gesek dll.
b.Indirect transmission : belt (ban mesin)
2. Transmisi dengan gerigi ( transmission Transmisi dengan gerigi ( transmission of mesh)of mesh) :
a. Direct transmission : gearDirect transmission : gear b. Indirect transmission : rantai, timing
belt dll.

1. Profil gigi sikloida ( Cycloide): struktur gigi melengkung cembung dan cekung mengikuti pola
sikloida .Jenis gigi ini cukup baik karena presisi dan ketelitiannya baik , dapat meneruskan daya lebih besar dari jenis yang
sepadan, juga keausannya dapat lebih lama. Tetapi mempunyai kerugian, diantaranya pembuatanya lebih
sulit dan pemasangannya harus lebih teliti ( tidak dapat digunakan sebagai roda gigi pengganti/change wheel),
dan harga lebih mahal .2. Profil gigi evolvente : struktur gigi ini berbentuk
melengkung cembung, mengikuti pola evolvente.Jenis gigi ini struktur cukup sederhana, cara
pembuatanya lebih mudah, tidak sangat presisi dan maupun teliti, harga dapat lebih murah , baik ekali
digunakan untuk roda gigi ganti. Jenis profil gigi evolvente dipakai sebagai profil gigi standard untuk
semua keperluan transmisi.3. Profil gigi khusus : misalnya; bentuk busur lingkaran
dan miring digunakan untuk transmisi daya yang besar dan khusus ( tidak dibicarakan)

3. Bentuk Gigi 1. Gigi lurus ( spur gear) bentuk gigi ini lurus dan paralel dengan sumbu roda gigi
2. Gigi miring ( helical gear) bentuk gigi ini menyilang miring terhadah sumbu roda gigi
3. Gigi panah ( double helical / herring bone gear) bentuk gigi berupa panah atau miring degan kemiringan berlawanan
4. Gigi melengkung/bengkok (curved/spherical gear ) bentuk gigi melengkung mengikuti pola tertentu ( lingkaran/ellips)

Spur & Helical Gear .

1. Sumbu rodagigi sejajar/paralel:Dapat berupa kerjasama rodagigi lurus, miring atau
spherical
2.Sumbu rodagigi tegak lurus berpotongan :Dapat berupa roda gigi trapesium/payung/ bevel
dengan profil lurus(radial), miring(helical) atau melengkung(spherical)
3. Sumbu rodagigi menyilang tegak lurus :Dapat berupa rodagigi cacing(worm), globoida,
cavex, hypoid, spiroid atau roda gigi miring atau melengkung.
4. Sumbu rodagigi menyilang :Dapat berupa rodagigi skrup(screw/helical) atau
spherical.
5. Sumbu roda gigi berpotongan tidak tegak lurus :Dapat berupa roda gigi payung/trapesium atau
helical dll.

Kerja sama roda gigi.

Beberapa hal yang cukup penting pada kerjasama roda gigi , apabila dua roda gigi atau lebih bekerja sama maka :
1. Profil gigi harus sama ( spur atau helical dll)
2. Modul gigi harus sama ( modul gigi adalah salah satu dimensi khusus roda gigi)
3. Sudut tekanan harus sama ( sudut perpin dahan daya antar gigi)
Modul gigi adalah besaran/dimensi roda gigi, yang dapat menyatakan besar dan kecilnya gigi .Bilangan modul biasanya bilangan utuh, kecuali untuk gigi yang kecil. (Bilangan yang ditulis tak berdimensi, walaupun dalam arti yang sesungguhnya dalam satuan mm )Sudut tekanan adalah sudut yang dibentuk antara garis singgung dua roda gigi dan garis perpindahan gaya antar dua gigi yang bekerja sama.

Aplikasi penggunaan penggerak

.

Modul gigi besar Sudut tekanan kecil (14 ½0 )
Modul gigi sedang Sudut tekanan sedang (200)
Modul gigi kecil Sudut tekanan besar (250)

Perbedaan modul menyebabkan bentuk sama tetapi ukurannya diperkecil, sedang perbedaan sudut tekanan menyebabkan tinggi gigi sama tetapi dapat lebih ramping.
Modul gigi (M) : M = t / (pi) T = jarak bagi gigi (pitch)M = ditulis tanpa satuan ( diartikan dalam: mm)
Diameter roda gigi : (ada empat macam diameter gigi)1. diameter lingkaran jarak bagi (pitch = d )2. diameter lingkaran dasar (base)3. diameter lingkaran kepala (adendum/max)4. diameter lingkaran kaki (didendum/min)
diamater lingkaran jarak(bagi) : d = M . z ------ (mm) z = jumlah gigi sehingga : d = ( t . z )/ p ----- (mm)

Sudut tekanan ( ) sudut yang dibentuk dari garis horisontal dengan garis normal dipersinggungan antar gigi. Sudut tekanan sudah di standarkan yaitu : = 20 0 .
Akibat adanya sudut tekanan ini, maka gaya yang dipindahkan dari roda gigi penggerak (pinion) ke roda gigi yang digerakkan (wheel), akan diuraikan menjadi dua gaya yang saling tegak lurus (vektor gaya), gaya yang sejajar dengan garis singgung disebut : gaya tangensial, sedang gaya yang tegak lurus garis singgung ( menuju titik pusat roda gigi) disebut gaya radial.

Gaya tangensial: merupakan gaya yang dipindahkan dari roda gigi satu ke roda gigi yang lain.Gaya radial: merupakan gaya yang menyebabkan kedua roda gigi saling mendorong ( dapat merugi kan).Dalam era globalisasi sudut tekanan distandarkan : = 20 0

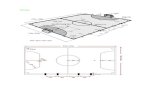
A rack and pinion is a pair of gears which convert rotational motion into linear motion. The circular pinion engages teeth on a flat bar - the rack. Rotational motion applied to the pinion will cause the rack to move to the side, up to the limit of its travel. For example, in a rack railway, the rotation of a pinion mounted on a locomotive or a railcar engages a rack between the rails and pulls a train along a steep slope.The rack and pinion arrangement is commonly found in the steering mechanism of cars or other wheeled, steered vehicles. This arrangement provides a lesser mechanical advantage than other mechanisms such as recirculating ball, but much less backlash and greater feedback, or steering "feel". The use of a variable rack was invented by Arthur E Bishop,[1] so as to improve vehicle response and steering "feel" on-centre, and that has been fitted to many new vehicles, after he created a hot forging process to manufacture the racks, thus eliminating any subsequent need to machine the form of the gear teeth.


Transmisi daya dengan roda gigi mempunyai keuntungan, diantaranya tidak terjadi slip yang menyebabkan speed ratio tetap, tetapi sering adanya slip juga menguntungkan, misalnya pada ban mesin (belt) , karena slip merupakan pengaman agar motor penggerak tidak rusak.
Apabila putaran keluaran (output) lebih rendah dari masukan (input) maka transmisi disebut : reduksi reduksi ( reduction gear),( reduction gear), tetapi apabila keluaran lebih cepat dari pada masukan maka disebut : inkrisi inkrisi ( increaser gear).( increaser gear).
Perbadingan input dan output disebut : perbandingan putaran transmisi (speed ratio), dinyatakan dalam notasi : i .
Speed ratio : i = n1 / n2 = d2 / d1 = z2 / z1
Apabila:i < 1 = transmisi roda gigi inkrisi
i > 1 = transmisi roda gigi reduksi

Wheel Pinion Pinion Wheel z2 , n2 z1, n1 z1, n1 z2, n2
Ada dua macam roda gigi sesuai dengan letak giginya :1. Roda gigi dalam (internal gear), yang mana gigi terletak
pada bagian dalam dari lingkaran jarak bagi.
2. Roda gigi luar ( external gear), yang mana gigi terletak dibagian luar dari lingkaran jarak, jenis roda gigi ini paling banyak dijumpai.Roda gigi dalam- banyak dijumpai pada transmisi roda gigi planit (planitary gear) dan roda gigi cyclo.
Apabila dua rodagigi dengan gigi luar maka putaran output akan berla wanan arah dengan putaran inputnya, tetapi bila salah satu rodagigi dengan gigi dalam maka arah putaran output akan sama dengan arah putaran input.
Bila kerjasama lebih dari dua rodagigi disebut : transmisi kereta api (train gear).

Train Gear
Speed ratio pertama : i1 = n1 / n2 n1 z1Speed ratio kedua : i 2 = n2 / n3
Speed ratio total : i T = i 1 x i 2 = n1 /n2 x n2 /n3 = n1 / n3Jadi pada train gear, speed ratio hanya tergantung roda gigi pertama dan yang terakhir, sedang roda gigi diantaranya hanya sebagai makelar saja.
Speed ratio total : i T = n1 / n3 = d3 / d1 = z3 / z1 .Sedang arah putaran tergantung jumlah roda gigi, apabila
jumlahnya genap ( 8, 10, 20 dll) pasti arah putaran output berlawanan arah Tetapi bila jumlah rodagigi gasal (3, 9, 15 dll) maka arah putaran output sama dengan arah inputnya.
Untuk roda gigi lurus (spur) dan penggunaan normal maka batas speed ratio adalah 6 , apabila speed ratio lebih dari enam harus dibuat dengan dua tingkat (stage).
Speed ratio maksimal : i maks Speed ratio maksimal : i maks << 6 6

Apabila speed ratio lebih dari enam maka dilakukan sebagai berikut (Multi stages):
Output : z4 , n4Pinion z2, n2 z3, n3Z1, n1Contoh gambar di atas transmisi rodagigi dua tingkat ( two stages)
Speed ratio total : i T = n1 / n2 x n3 / n4 = (n1 . Speed ratio total : i T = n1 / n2 x n3 / n4 = (n1 . n3) / (n2 . n4)n3) / (n2 . n4)
Pada gambar sket di atas terlihat bahwa fungsi roda gigi , selain yang pertama (pinion) dan yang terakhir (wheel), yaitu roda gigi 2 dan roda gigi 3 diperhitungkan dalam menghitung speed ratio total.

Dalam aplikasi, speed ratio roda gigi mempu nyai nilai tidak bilangan utuh, misalnya : 2,4, 6 dll, tetapi berupa bilangan tertentu, misal: 2,9991 ; 1,666 dll.
Hal tersebut terjadi karena perancang transmisi roda gigi menginginkan , bahwa setiap gigi diharap kan bertemu dengan setiap gigi dari roda gigi yang lain, misalnya: design : i = 2 maka jumlah gigi pinion= 20 (min) dan rodagigi wheel= 40 , maka gigi nomor satu akan selalu bertemu dengan gigi nomor satu roda gigi lain, apabila terjadi ketidak homogenan material maka bagian tersebut mungkin akan aus tidak merata, oleh sebab itu dicari cara yang mudah, yaitu dengan menambah satu gigi pada wheel misalnya.
Jadi : i = 41 / 20 = 2,0500 dll


Roda gigi payung ( bevel gear)Roda gigi payung atau roda gigi trapesium digunakan
apabila diinginkan antara sumbu input dan sumbu output menyudut 900
Bentuk gigi yang biasa dipakai pada roda gigi payung :Bentuk gigi lurus atau radialBentuk gigi miring atau helicalBentuk gigi melengkung atau spherical.
Output (wheel)Input (pinion) gaya aksial z 2, n2Z1, n1 Gaya yang ada : yaitu gaya tangensial
Gaya radialGaya aksial
Ketiga gaya dapat dilukiskan sebagai gaya dalam 3 dimensi.

Sabuk dan Rantai
Jarak yang jauh antara 2 buah poros sering tidak memungkinkan transmisi langsung dengan roda gigi,maka dari itu cara transmisi putaran atau daya yang lain dapat diterapkan yakni sebuah sabuk luwes atau rantai dibelitkan sekeliling puli atau sproket pada poros.
Transmisi dengan elemen mesin yang luwes dapat di golongkan atas:a.Transmisi sabuk b.Transmisi rantai




Roda gigi cacing ( worm gear)Roda gigi cacing (worm) digunakan apabila diinginkan antara sumbu input dan sumbu output menyilang tegak lurus .Roda gigi cacing mempunyai karakteristik yang khas, yaitu input dan output tidak dapat dipertukarkan. Jadi input selalu dari roda cacingnya (worm)
rg.cacing (worm)
Wheel zWO , n WO
ZW , nW
Putaran roda gigi cacing (worm) = nWO
Jumlah jalan /gang/spoed = zWO ( 1, 2, 3 )
Gaya yang ada pada roda gigi worm :
Gaya tangensialGaya radialGaya aksial

Ketiga gaya dapat dilukis dalam tiga dimensi Misalnya pada roda gigi worm atau sering disebut batang berulir , gaya2 tersebut dapat dilihat pada gambar di bawah .
gaya aksial gaya radial gaya tangensial worm worm worm.Apabila roda gigi worm ini , batang berulirnya ada ofset kedalam , maka disebut : roda gigi spiroid. Dan apabila ofsetnya lebih jauh kedalam maka disebut roda gigi hypoid .

rg. Hypoidrg.worm rg.spiroid
Roda gigi hypoid paling banyak digunakan pada roda gigi diferensial pada mobil.

Cyclo gear



Roda penerusRoda penerus dipasang di ujung poros
engkol,berfungsi sebagai :a. Mengurangi ketakberaturan periodik
momen putar,yang disebabkan oleh kedudukan
dan tekanan batang hubung,sehingga timbul
gaya tangensial
b. mengurangi secara mendadak yang disebabkan
oleh pembebanan yang berubah secara mendadak
c.menghindari resonansi akibat getaran dalam poros engkol

Gambar Roda Penerus

Differential gear

APLIKASI SISTEM TRANSMISI
PENGHUBUNG MESIN PENGGERAK
Agar menghasilkan listrik yang berkualitas Tinggi , Maka generator harus bekerja pada kecepatan putar (rpm) tertentu sesuai rekomendasi pabrik. Agar berputar, generator harus dihubungkan dengan yang mesin penggerak berupa engine Bakar, turbin air, turbin UAP, kincir angin, kincir air, the DSB.

Agar pembangkit listrik memiliki kinerja this efisiensi maksimal, is required didesain sedemikian rupa sehingga mesin penggerak maupun generator bekerja pada kecepatan putar ideal (peak speed) masing-masing. Mencapai untuk keadaan ideal tersebut, diperlukan jenis penghubung yang sesuai dengan perbandingan kecepatan Antara tree mesin penggerak dengan tree generator. Adapun perbandingan kecepatan putar tersebut ADA 3 macam yaitu:
Pereduksi-1
Pereduksi-2
Pereduksi-3
Del exchange



1. Kecepatan putar mesin penggerak sama dengan kecepatan putar generator.Keadaan ini digunakan sambungan langsung dimana Poros mesin penggerak tersambung direct (coaxis) generator Poros dengan yang lazim digunakan pada genset engine bensin portable. Alternatif kedua should digunakan direct couple seperti yang digunakan pada mesin pemotong rumput. Alternatif ketiga should digunakan sambungan tidak direct yaitu Systems pulley-strap atau Systems gear-rantai atau Systems equipment gear (diameter pulley kedua atau jumlah Gigi kedua GIR musti sama).
2. Kecepatan putar mesin penggerak lebih rendah daripada kecepatan putar generator.Keadaan untuk ini, diperlukan Systems multiplikasi putaran sebagai penghubung. perbedaan kecepatan putar tersebut tidak terlalu jauh

3), Systems multiplikasi tunggal yang cukup sederhana. Adapun Systems multiplikasi tersebut berupa Systems pulley belt-yang terdiri dari sebuah pulley besar pada batang mesin penggerak sebuah pulley kecil pada batang generator yang dihubungkan oleh sebuah belt.
Alternatif kedua berupa Systems gear rantai-yang terdiri dari sebuah gear (sproket) besar pada batang mesin penggerak this sebuah gear (sproket) kecil pada batang generator yang dihubungkan oleh sebuah rantai.
Alternatif ketiga berupa Systems equipment gear yang terdiri dari sebuah gear besar pada batang mesin penggerak sebuah gear kecil pada batang generator yang saling bersinggungan.