Dasar Perdagangan Bebas dan Pelabuhan Bebas di Negeri- negeri ...
Upload
ariyasujatmikoCategory
view
640download
156description
LAPORAN AKHIR PRAKTIKUMFENOMENA DASAR
GETARAN BEBAS
Oleh:
KELOMPOK B5
ARIYA SUJATMIKO 1307113184
HARRY RUDI SARAGIH 1207121235
NOFRI EKA CANDRA 1307113432
TENGKU HAMZIR M.Y 1307114531
LABORATORIUM KONSTRUKSI DAN PERANCANGANJURUSAN TEKNIK MESIN
FAKKULTAS TEKNIK UNIVERSITAS RIAUOKTOBER
2015

KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa, karena
atas berkat rahmat dan hidayah-Nya, sehingga penulis dapat menyelesaikan
laporan akhir pratikum FENOMENA DASAR, khususnya ”GETARAN BEBAS”
sebagai laporan akhir pratikum getaran bebas ini tepat pada waktunya.
Pertama-tama penulis mengucapkan banyak terima kasih kepada:
Orang tua yang telah memberikan dorongan moril dan materildalam
proses pembuatan laporan akhir ini.
Bapak Mustafa Akbar,ST.,MT,selaku dosen pengampu praktikum
fenomena dasar khususnya dibidang kontruksi.
Asisten praktikum fenomena dasar khususnya di laboratorium
kontruksi dan perancangan yang telah membimbing dan memberikan
arahan dalam proses pembuatan laporan ini
Teman-teman yang telah membantu dalam pembuatan laporan
pratikum fenomena dasar,khususnya getaran bebas.
Penulis telah berusaha menyusun laporan ini dengan sebaik-baiknya.
Namun, penulis menyadari akan keterbatasan kemampuan penulis, sehinggamasih
terdapatnya banyak kesalahan dan kekurangan yang luput dari perhatian penulis.
Penulis mengharapkan kritik dan saran dari pembaca sangatlah diharapkan untuk
membangun kedepannya. atas perhatiannya penulis mengucapkan banyak terima
kasih.
Pekanbaru, Oktober 2015
Penulis
ii
DAFTAR ISI
KATA PENGANTAR............................................................................................ii
DAFTAR ISI.........................................................................................................iii
DAFTAR GAMBAR.............................................................................................iv
DAFTAR TABEL..................................................................................................v
DAFTAR GRAFIK...............................................................................................vi
DAFTAR NOTASI..............................................................................................vii
BAB I PENDAHULUAN
1.1 Latar Belakang..........................................................................................1
1.2 Tujuan Percobaan......................................................................................1
1.3 Manfaat......................................................................................................2
BAB II LANDASAN TEORI
2. 1 Getaran......................................................................................................3
2.2 Klasifikasi Getaran....................................................................................5
2.3 Pemasangan Pegas....................................................................................6
2.4 Jenis Getaran.............................................................................................9
2.5 Jenis-Jenis Redaman................................................................................15
2.5 Pengurangan Logaritmik.........................................................................17
2.6 Pengaplikasian Getaran...........................................................................17
2.7 Alat Pengukur Getaran............................................................................18
BAB III METODOLOGI
3.1 Peralatan..................................................................................................21
3.2 Prosedur Praktikum.................................................................................23
BAB IV PENGOLAHAN DATA
4.1 Tabel Data...............................................................................................24
iii
4.2 Contoh Perhitungan.................................................................................27
4.3 Tabel Perhitungan....................................................................................29
4.4 Grafik Perhitungan..................................................................................30
4.5 Analisis dan Pembahasan........................................................................31
BAB IV DISKUSI DAN KESIMPULAN
DAFTAR PUSTAKA
LAMPIRAN
iv
DAFTAR GAMBAR
Gambar 2.1 Skema massa-pegas..........................................................................3
Gambar 2.2 Prinsip bandul-massa.......................................................................4
Gambar 2.3 Klasifikasi getaran............................................................................6
Gambar 2.4 Rangkaian Paralel.............................................................................6
Gambar 2.5 Diagram benda bebas Paralel pegas.................................................7
Gambar 2.6 Pegas Seri.........................................................................................8
Gambar 2.7 Diagram benda bebas seri pegas......................................................8
Gambar 2.9 Hubungan antara gaya dan pertambahan panjang............................9
Gambar 2.10 Getaran Bebas................................................................................10
Gambar 2.11 Getaran Bebas Tanpa Redaman.....................................................10
Gambar 2.12 Getaran Bebas Redaman................................................................11
Gambar 2.13 Getaran Bebas Dengan Redaman...................................................13
Gambar 2.14 Viscous Dumping...........................................................................16
Gambar 2.15 Coulomb Dumping.........................................................................16
Gambar 2.16 Solid Dumping................................................................................16
Gambar 2.17 Laju Peluruhan Osilasi...................................................................17
Gambar 2.18 Suspensi Kendaraan.......................................................................18
Gambar 2.19 Jembatan.........................................................................................18
Gambar 3.1 Alat uji getaran bebas.....................................................................21
Gambar 3.2 Adaptor...........................................................................................21
Gambar 3.3 Pegas...............................................................................................22
Gambar 3.5 Stopwatch.......................................................................................22
Gambar 3.6 Alat Uji Getaran Bebas...................................................................23
Gambar 3.7 Adaptor............................................................................................23
Gambar 4.1 Grafik Percobaan 1..........................................................................25
Gambar 4.2 Grafik Percobaan 2...........................................................................25
Gambar 4.3 Grafik Percobaan 3...........................................................................25
Gambar 4.4 Grafik Percobaan 4...........................................................................26
Gambar 4.5 Grafik Percobaan 5...........................................................................26
Gambar 4.6 Grafik Percobaan 6...........................................................................26
Gambar 4.7 Grafik Percobaan 7...........................................................................26
v
Gambar 4.8 Grafik Percobaan 8..........................................................................27
Gambar 4.9 Grafik Percobaan 9..........................................................................27
Gambar 4.10 Grafik Percobaan 10........................................................................27
Gambar 4.11 Grafik Percobaan 11........................................................................27
Gambar 4.12 Grafik Percobaan 12........................................................................28
vi
DAFTAR TABEL
Tabel 4.1 Tabel tanpa redaman dengan 0,34 kg..................................................30
Tabel 4.2 Tabel tanpa redaman dengan 0,64 kg..................................................30
Tabel 4.3 Tabel dengan redaman dengan 0,34 kg................................................31
Tabel 4.4 Tabel dengan redaman dengan 0,64 kg................................................31
vii
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi terus meningkat dengan pesat terutama pada
proses produksi dan konstruksi dalam sebuah perkembangan industrial yang tidak
asing bagi para akademika terutama pada bidang teknik mesin. Berkaitan dengan
teknik mesin, banyak sekali ilmu yang wajib dipelajari, dari mulai rancang
konstruksi, struktur otomotif, konstruksi crane, konstruksi jembatan dan lain-
lain.Dari rancang konstruksi tersbut diperlukan suatu ilmu yang penting demi
terjaganya keamanan dalam pemakaian, yaitu ilmu getaran. Ilmu getaran
berhubungan dengan gerakan osilasi benda dan gaya yang berhubungan dengan
gerak tersebut. Semua benda yang mempunyai massa dan elastisitas mampu
bergetar. Mesin dan struktur rekayasa mengalami getaran sampai derajat tertentu
dan dalam rancangannya memerlukan pertimbangan sifat osilasinya. Getaran
bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada dalam sistem
sistem itu sendiri, serta tidak ada gaya luar yang bekerja. Sistem yang bergetar
bebas akan bergetar satu atau lebih frekuensi pribadinya yang merupakan sifat
sistem dinamika yang dibentuk oleh distribusi massa dan kekakuannya.
Parameter-parameter dari karakteristik getaran bebas satu derajat
kebebasan yaitu frekuensi, amplitudoo, dan periode yang tidak dapat diketahui
secara langsung. Parameter-parameter ini dapat diketahui dalam bentuk grafik
dengan menggunakan alat peraga yaitu dengan cara menarik beban terhubung
pada ujung pegas yang bergantung dan dilepaskan, maka beban akan bergetar
bersamaan dengan pegas, lalu pena yang dihubungkan dengan beban ikut bergerak
dan melukis sebuah grafik pada kertas.
Dengan adanya pemahaman pada praktikum getaran bebas ini akan
berguna kelas dalam kehidupan sehari-hari.
1.2 Tujuan Percobaan
Adapun tujuan percobaan dari praktikum getaran bebas adalah sebagai
berikut:
1

1. Memahami fenomena getaran bebas baik teredam maupun ta teredam
beserta segala atributnya seperti frekuensi pribadi redaman viskos dan
redaman coulomb (redkan karena efek gesekan).
2. Mengetahui berbagai cara untuk menentukan parameter sistem getaran
seperti konstan kekakuan pegas dan kiefisien redaman viskos melalui
eksperimen.
3. Membandingkan solusi teoritik dengan hasil eksperimen.
1.3 Manfaat
Adapun manfaat yang didapat dari praktikum getaran bebas adalah
sebagai berikut:
1. Memahami fenomena-fenomena pada praktikum getaran bebas.
2. Dapat mengetahui berbagai cara menentukan parameter sistem getaran.
3. Mendapatkan wawasan dalam dunia permesinan khususnya getaran.
2

BAB II
LANDASAN TEORI
2. 1 Getaran
Getaran dapat didefinisikan sebagai gerak osilasi dari sistem mekanik di
sekitar titik atau posisi seimbang. Getaran terjadi karena adanya gaya eksitasi.
Getaran adalah gerakan translasi (bolak-balik) yang ada disekitar titik
kesetimbangan dimana kuat lemahnya dipengaruhi besar kecilnya energi yang
diberikan. Kesetimbangan disni maksudnya adalah keadaan dimana suatu benda
berada ada posisi diam jika tidak ada gaya yang bekerja pada benda tersebut.
Semua benda yang mempunyai massa dan elastisitas mampu bergetar. Mesin dan
struktur rekayasa mengalami getaran dampai derajat tertentu dan rancangannya
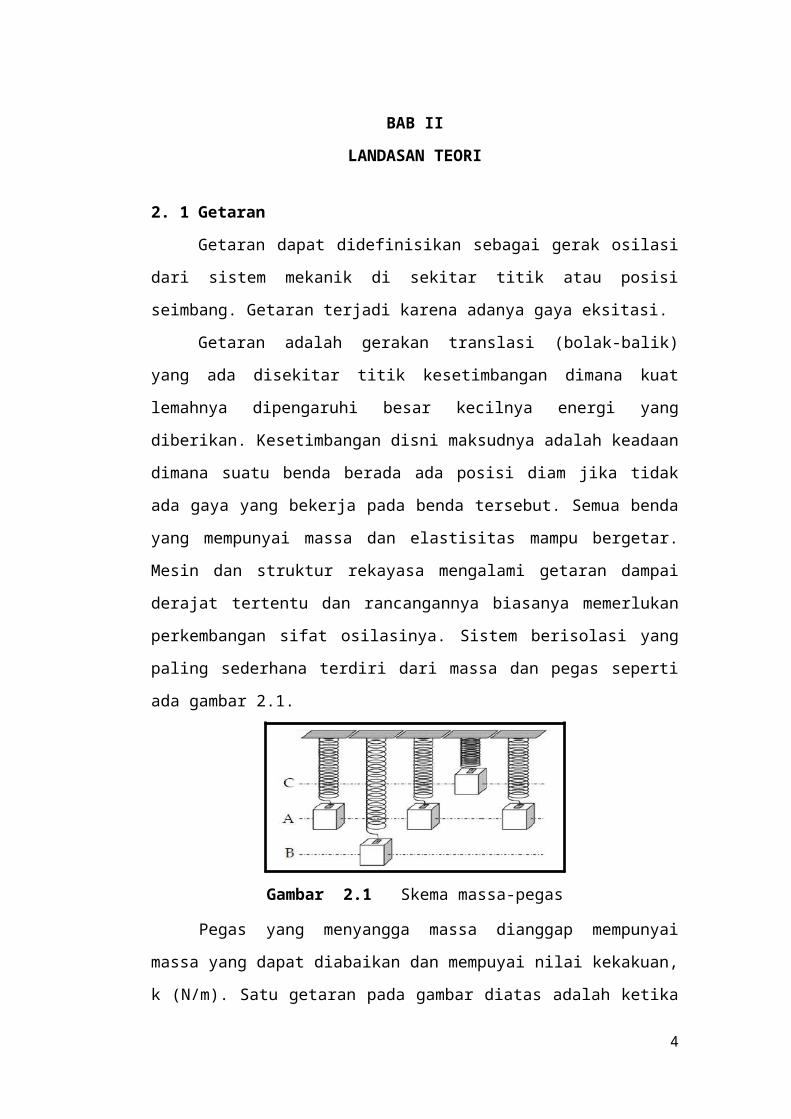
biasanya memerlukan perkembangan sifat osilasinya. Sistem berisolasi yang
paling sederhana terdiri dari massa dan pegas seperti ada gambar 2.1.
Gambar 2.1 Skema massa-pegas
Pegas yang menyangga massa dianggap mempunyai massa yang dapat
diabaikan dan mempuyai nilai kekakuan, k (N/m). Satu getaran pada gambar
diatas adalah ketika beban berada pada posisi A kemudian ditarik sedemikian
sehingga sampai pada posisi B, jika dilepaskan, beban kembali ke posisi A,
kemudian ke posisi C dan kembali keposisi A, begitu seterusnya. Terlihat bahwa
beban melakukan gerak bolak balik terhadap titik kesetimbangan A. Jarak antara
posisi benda saat bergetar dengan posisi pada keadaan setimbang disebut
simpangan terjadi disebut amplitude.
3
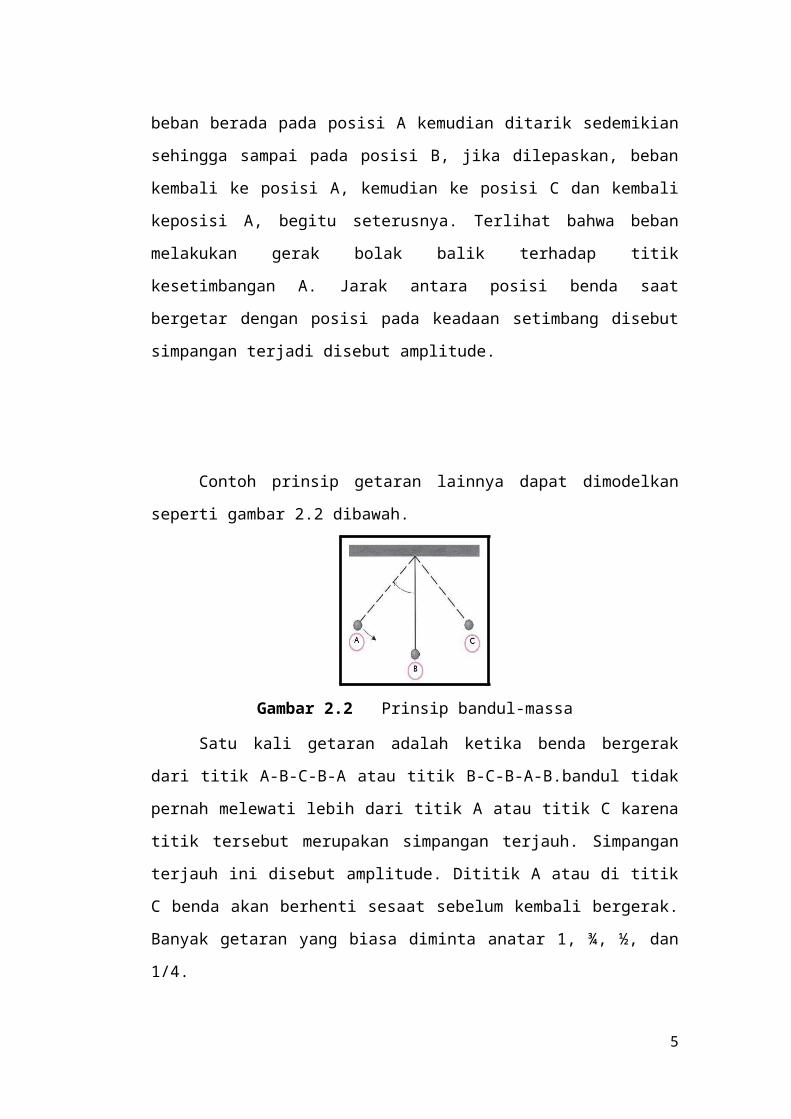
Contoh prinsip getaran lainnya dapat dimodelkan seperti gambar 2.2
dibawah.
Gambar 2.2 Prinsip bandul-massa
Satu kali getaran adalah ketika benda bergerak dari titik A-B-C-B-A atau
titik B-C-B-A-B.bandul tidak pernah melewati lebih dari titik A atau titik C
karena titik tersebut merupakan simpangan terjauh. Simpangan terjauh ini disebut
amplitude. Dititik A atau di titik C benda akan berhenti sesaat sebelum kembali
bergerak. Banyak getaran yang biasa diminta anatar 1, ¾, ½, dan 1/4.
1 = A-B-C-B-A
¾ = A-B-C-B
½ = A-B-C
¼ = A-B
Getaran dapat di evaluasi melalui 3 aspek, yaitu:
1. Velocity adalah kecepatan, dalam hal ini yang dimaksudkan adalah nilai
kecepatan getaran (frekuensi getaran) pada suatu mesin/alat tiap satuan
jarak (meter) per detiknya (m/s).
2. Acceleration adalah percepatan, yang dimaksud adalah percepatan benda,
mesin atau suatu alat melakukan suatu gerakan (getaran mekanis) tiap
satuan jarak (meter) per detik kuadrat (m/s2).
3. Displacement adalah pergeseran atau perpindahan letak yang dialami oleh
mesin atau alat yang diakibatkan oleh adanya getaran pada alat tersebut tiap
millimeter (mm).
Gaya pegas terjadi hanya jika terdapat defleksi relatif antara kedua ujung-
ujungnya. Menurut hukum Hooke’s besarnya gaya pegas sebanding dengan
defleksi relatif tersebut. Konstanta kesebandingannya disebut konstanta pegas (k)
dan dinyatakan dalam satuan gaya per satuan panjang. Untuk peredam viscous
4
besarnya gaya redaman sebanding dengan kecepatan dan faktor kesebandingan
disebut koefisien redaman.
Karakteristik Getaran
1. Amplitudo (A)
Amplitudo merupakan simpangan yang terbesar dari posisi
kesetimbangan, yaitu nilai maksimum dari A dengan satuan meter (m).
2. Periode (T)
Periode adalah waktu yang dibutuhkan untuk menempuh satu lintasan
bolak-balik (siklus), dengan satuan detik (s).
T=1f
3. Frekuensi (f)
4. Frekuensi merupakan banyaknya siklus (getaran) yang dilakukan dalam
satuan waktu, dengan satuan Hz.
T=1f= v
λ
Frekuensi sudut (ωn) adalah 2π dikalikan frekuensi.
ωn=2πf =√ km
2.2 Klasifikasi Getaran
Getaran dapat diklasifikasikan menurut ada tidaknya eksitasi yang bekerja
secara kontinyu, menurut derajat kebebasannya atau menurut sistem
massanya.Menurut klasifikasi yang pertama getaran dibedakan sebagai getaran
bebas atau getaran paksa.Menurut derajat kebebasannya getaran dapat dibedakan
sebagai getaran derajat satu, dua, atau n derajat sesuai dengan banyakya koordinat
bebas (independence) yang diperlukan untuk mendefinisikan persamaan gerak
sistem tersebut. Pada sistem getaran massa diskret setiap massa dianggap sebagai
bodi kaku dan tidak mempunyai elastisitas. Sebaliknya pada sistem massa
kontinu, massa yang bergetar tidak dianggap sebagai bodi kaku tetapi mempunyai
elastisitas sehingga dimungkinkan adanya gerak relatif di antara titik-titik pada
massa tersebut. Sistem massa kontinyu memiliki n derajat kebebasan yang tak
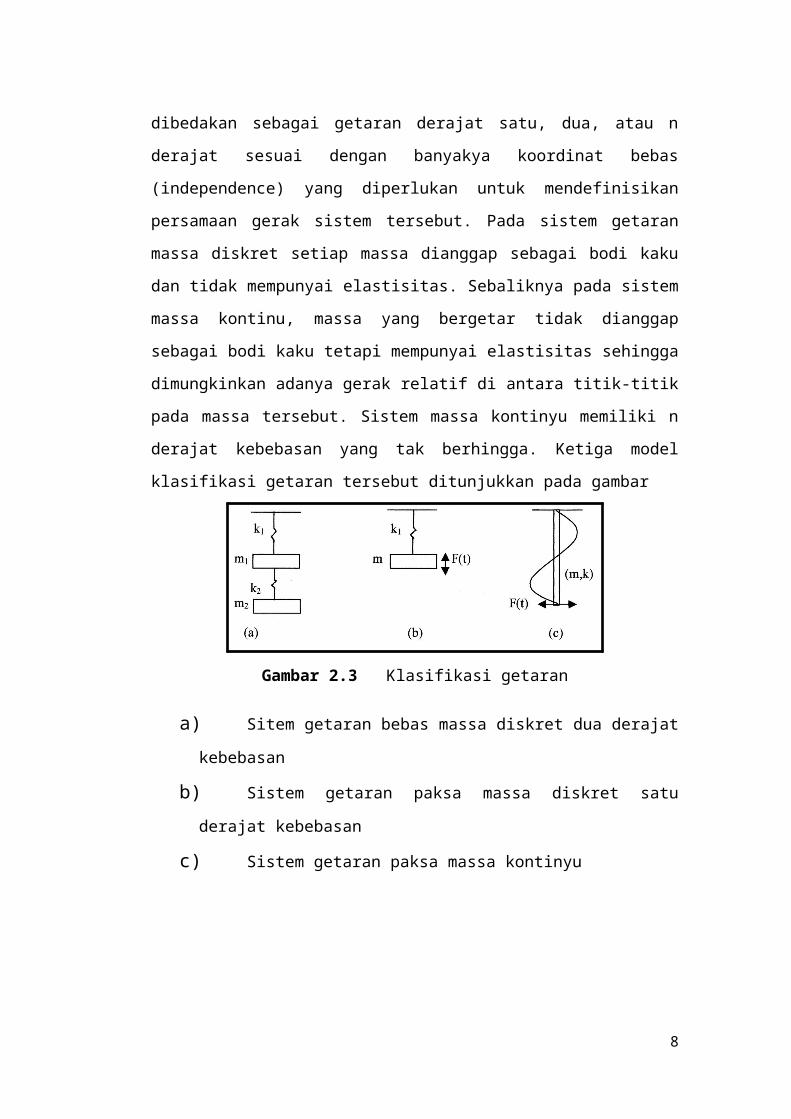
berhingga. Ketiga model klasifikasi getaran tersebut ditunjukkan pada gambar
5
Gambar 2.3 Klasifikasi getaran
a) Sitem getaran bebas massa diskret dua derajat kebebasan
b) Sistem getaran paksa massa diskret satu derajat kebebasan
c) Sistem getaran paksa massa kontinyu
2.3 Pemasangan Pegas
Pada suatu sistem pemasangan pegas ada dua yaitu yang dipasang seri atau
secara pararel atau dengan pemasangan gabungan.
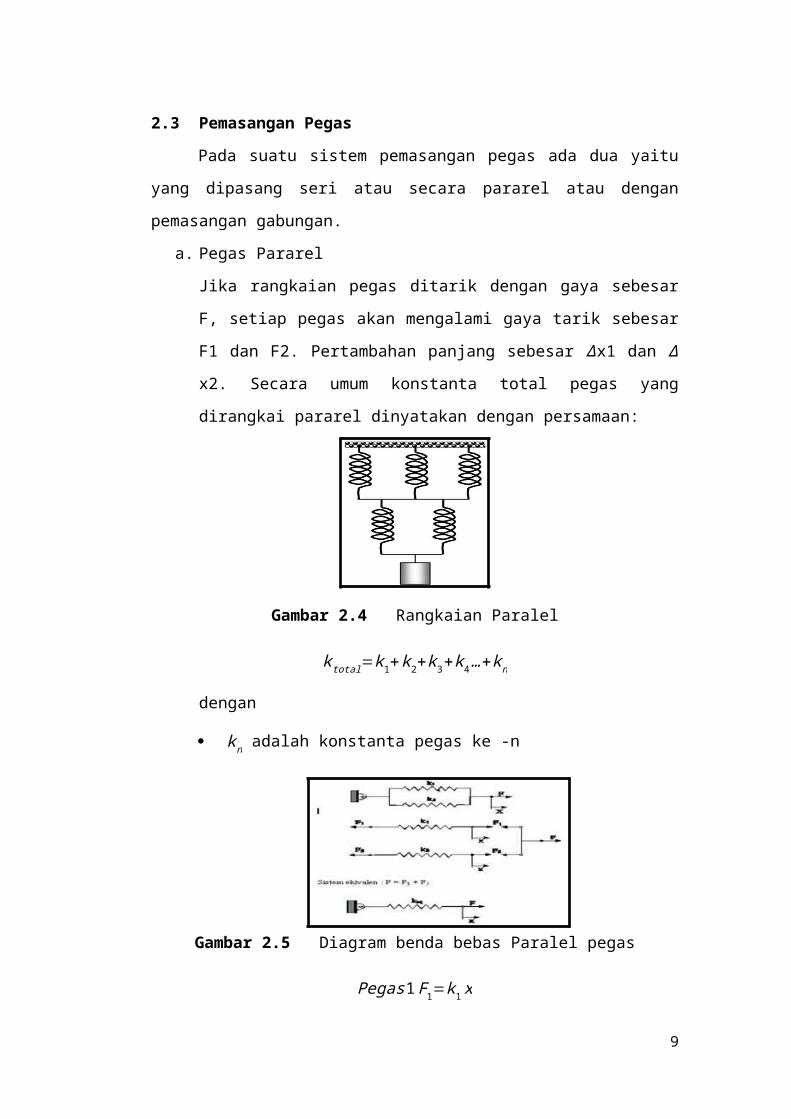
a. Pegas Pararel
Jika rangkaian pegas ditarik dengan gaya sebesar F, setiap pegas akan
mengalami gaya tarik sebesar F1 dan F2. Pertambahan panjang sebesar ∆
x1 dan ∆x2. Secara umum konstanta total pegas yang dirangkai pararel
dinyatakan dengan persamaan:
Gambar 2.4 Rangkaian Paralel
k total=k1+k 2+k3+k4 …+kn
dengan
k n adalah konstanta pegas ke -n
6
Gambar 2.5 Diagram benda bebas Paralel pegas
Pegas 1 F1=k1 x
Pegas 2 F2=k2 x +
F1+F2=( k1+k2 ) x
F1=ke . x → ke=k1+k 2
b. Pegas Seri
Gaya yang bekerja pada setiap pegas adalah sebesar F1, sehingga pegas
akan mengalami pertambahan panjang sebesar ∆x1 dan ∆x2. Secara
umum konstanta total pegas yang disusun seri dinyatakan dengan
persamaan.
1k total
= 1k1
+ 1k2
+ 1k3
+…+ 1kn
Dengan kn = konstanta pegas ke-n
Gaya P menghasilkan perpindahan total y dari ujung bebas pada susunan
pegas sebesarnya
y= Pk 1
+ Pk2
Akibatnya, gaya yang diperlukan untuk satu unit perpindahan (konstanta
pegas ekivalen) diberikan oleh:
k e=Py
Dengan mensubtitusikanya , maka didapatkan nilai kebalikan dari
konstanta pegas:
1ke
= 1k1
+ 1k2
7
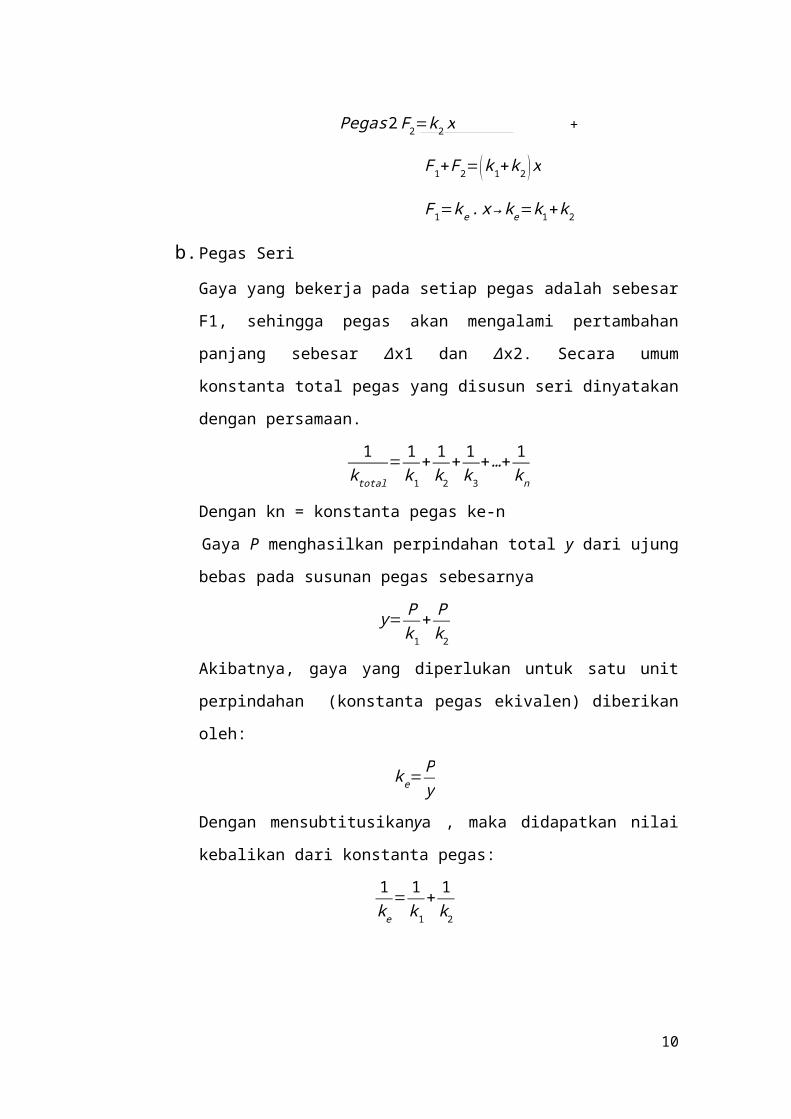
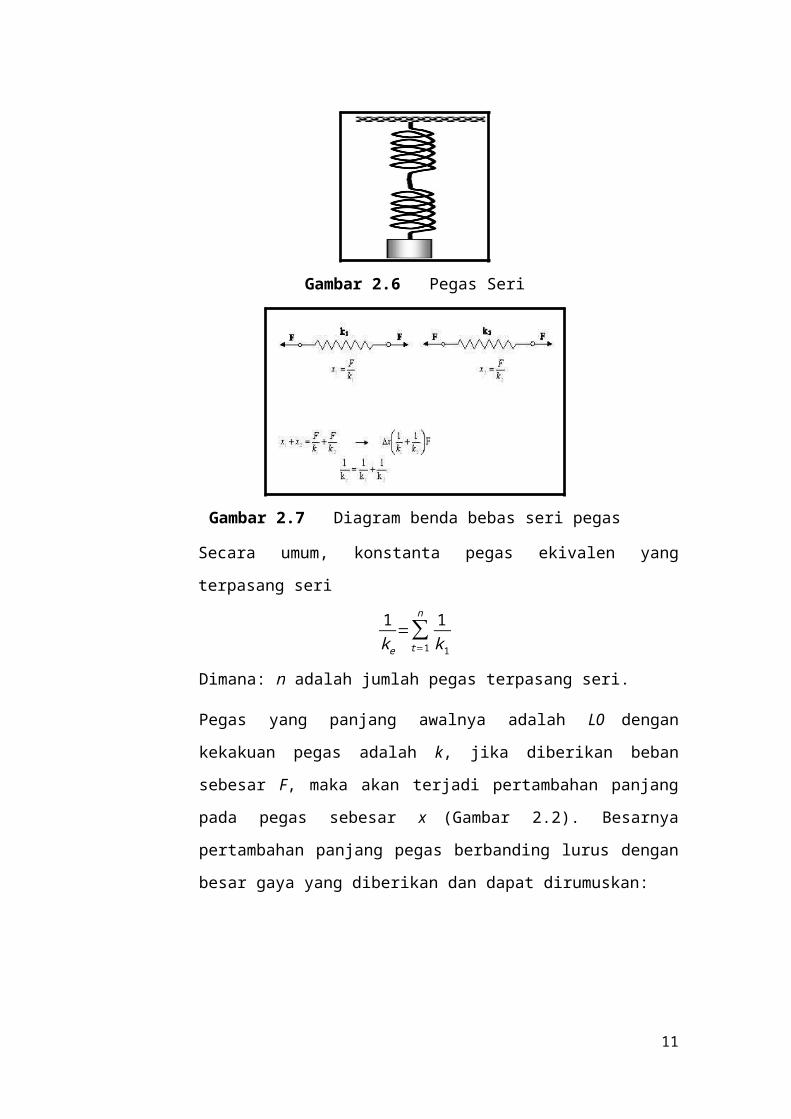
Gambar 2.6 Pegas Seri
Gambar 2.7 Diagram benda bebas seri pegas
Secara umum, konstanta pegas ekivalen yang terpasang seri
1ke
=∑t=1
n1k1
Dimana: n adalah jumlah pegas terpasang seri.
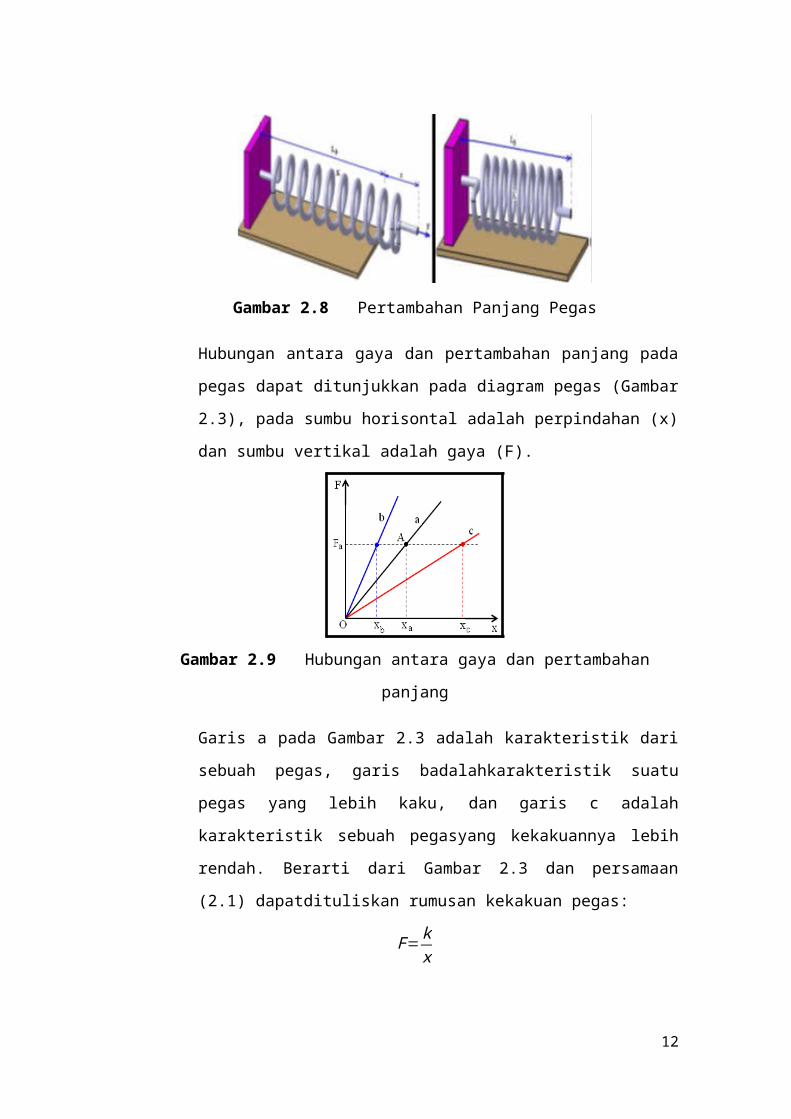
Pegas yang panjang awalnya adalah L0 dengan kekakuan pegas adalah k,
jika diberikan beban sebesar F, maka akan terjadi pertambahan panjang
pada pegas sebesar x (Gambar 2.2). Besarnya pertambahan panjang pegas
berbanding lurus dengan besar gaya yang diberikan dan dapat dirumuskan:
Gambar 2.8 Pertambahan Panjang Pegas
8
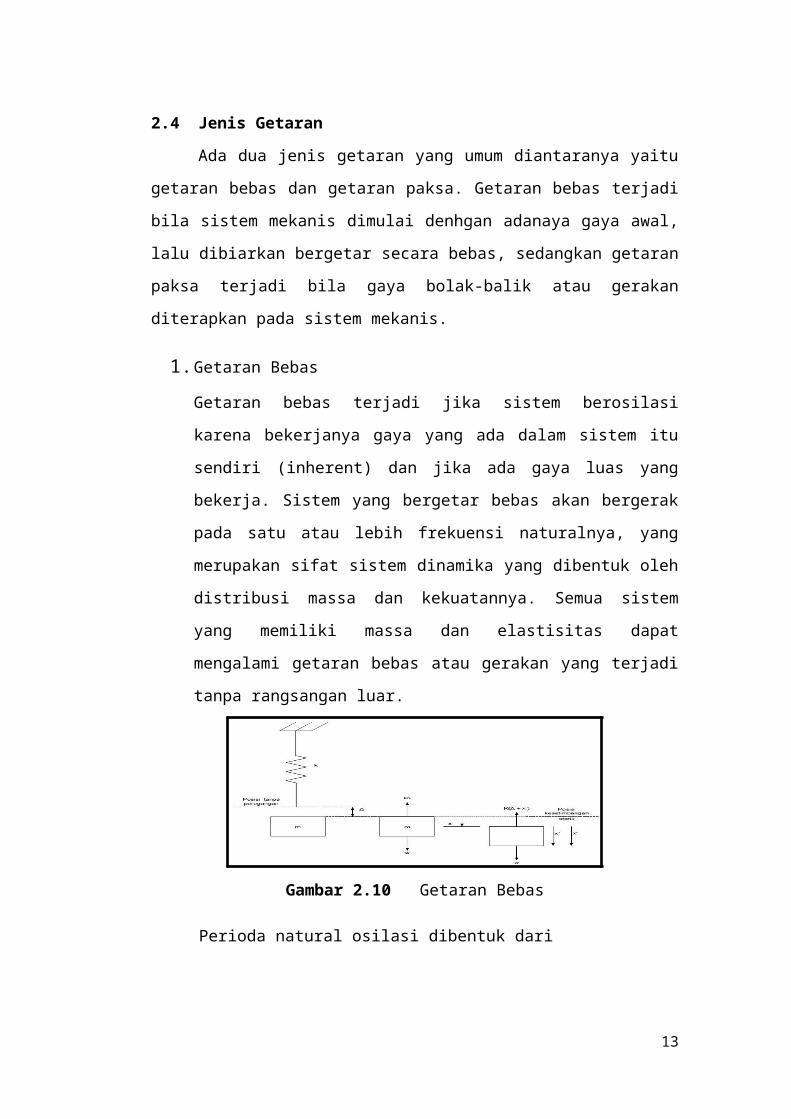
Hubungan antara gaya dan pertambahan panjang pada pegas dapat
ditunjukkan pada diagram pegas (Gambar 2.3), pada sumbu horisontal
adalah perpindahan (x) dan sumbu vertikal adalah gaya (F).
Gambar 2.9 Hubungan antara gaya dan pertambahan panjang
Garis a pada Gambar 2.3 adalah karakteristik dari sebuah pegas, garis
badalahkarakteristik suatu pegas yang lebih kaku, dan garis c adalah
karakteristik sebuah pegasyang kekakuannya lebih rendah. Berarti dari
Gambar 2.3 dan persamaan (2.1) dapatdituliskan rumusan kekakuan pegas:
F= kx
2.4 Jenis Getaran
Ada dua jenis getaran yang umum diantaranya yaitu getaran bebas dan
getaran paksa. Getaran bebas terjadi bila sistem mekanis dimulai denhgan adanaya
gaya awal, lalu dibiarkan bergetar secara bebas, sedangkan getaran paksa terjadi
bila gaya bolak-balik atau gerakan diterapkan pada sistem mekanis.
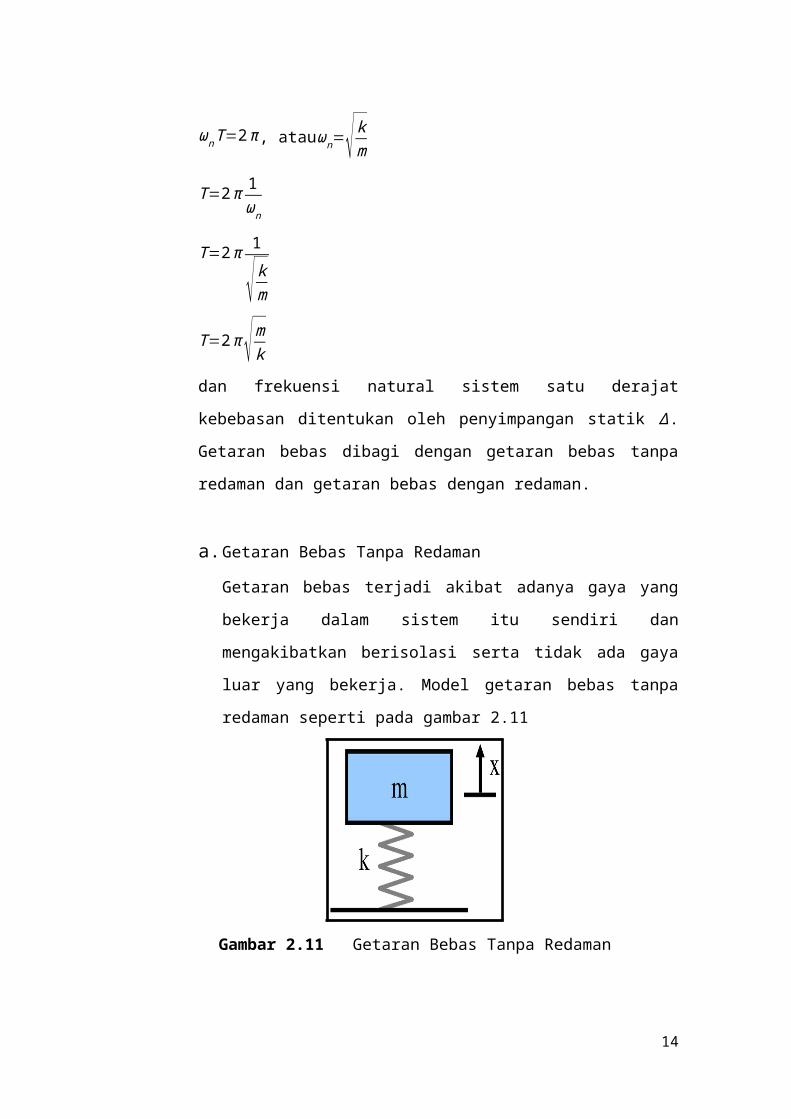
1. Getaran Bebas
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang
ada dalam sistem itu sendiri (inherent) dan jika ada gaya luas yang bekerja.
Sistem yang bergetar bebas akan bergerak pada satu atau lebih frekuensi
naturalnya, yang merupakan sifat sistem dinamika yang dibentuk oleh
distribusi massa dan kekuatannya. Semua sistem yang memiliki massa dan
elastisitas dapat mengalami getaran bebas atau gerakan yang terjadi tanpa
rangsangan luar.
9
Gambar 2.10 Getaran Bebas
Perioda natural osilasi dibentuk dari
ωnT=2 π, atauωn=√ km
T=2 π1ωn
T=2π1
√ km
T=2 π √ mk
dan frekuensi natural sistem satu derajat kebebasan ditentukan oleh
penyimpangan statik ∆. Getaran bebas dibagi dengan getaran bebas tanpa
redaman dan getaran bebas dengan redaman.
a. Getaran Bebas Tanpa Redaman
Getaran bebas terjadi akibat adanya gaya yang bekerja dalam sistem itu
sendiri dan mengakibatkan berisolasi serta tidak ada gaya luar yang
bekerja. Model getaran bebas tanpa redaman seperti pada gambar 2.11
Gambar 2.11 Getaran Bebas Tanpa Redaman
10
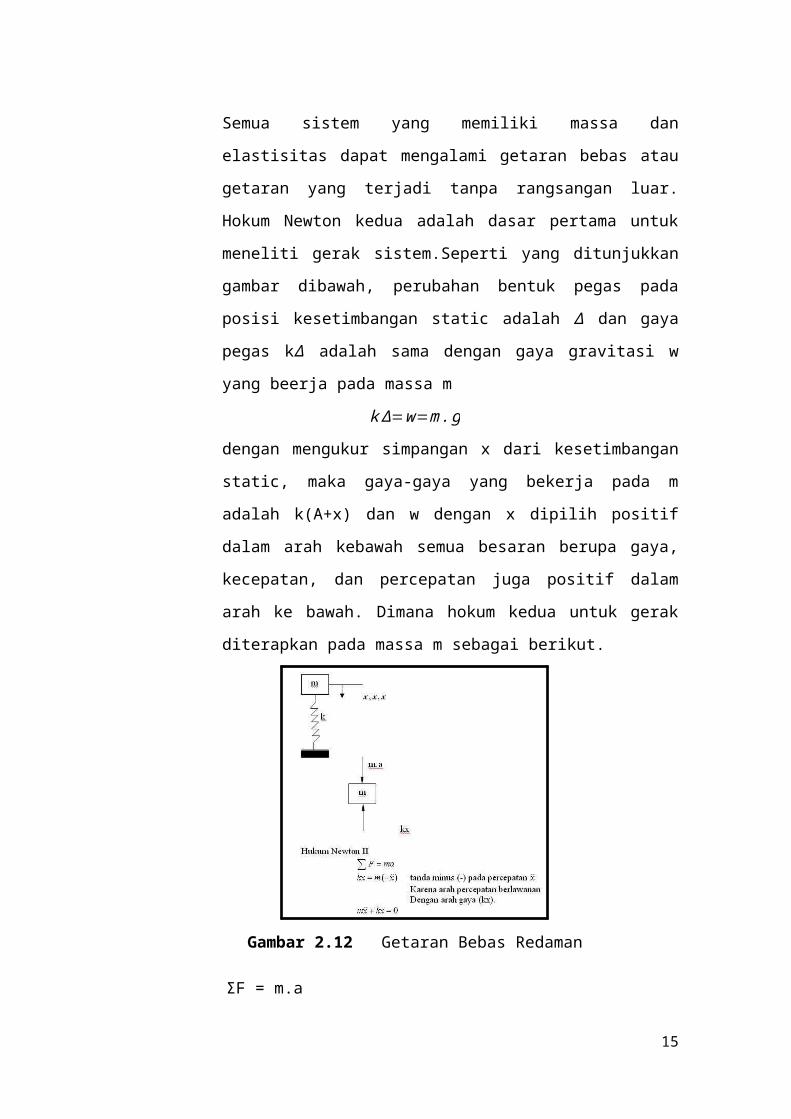
Semua sistem yang memiliki massa dan elastisitas dapat mengalami
getaran bebas atau getaran yang terjadi tanpa rangsangan luar. Hokum
Newton kedua adalah dasar pertama untuk meneliti gerak
sistem.Seperti yang ditunjukkan gambar dibawah, perubahan bentuk
pegas pada posisi kesetimbangan static adalah ∆ dan gaya pegas k∆
adalah sama dengan gaya gravitasi w yang beerja pada massa m
k ∆=w=m. g
dengan mengukur simpangan x dari kesetimbangan static, maka gaya-
gaya yang bekerja pada m adalah k(A+x) dan w dengan x dipilih
positif dalam arah kebawah semua besaran berupa gaya, kecepatan,
dan percepatan juga positif dalam arah ke bawah. Dimana hokum
kedua untuk gerak diterapkan pada massa m sebagai berikut.
Gambar 2.12 Getaran Bebas Redaman
ƩF = m.a
ƩF = 0
w - kΔ = 0
w = kΔ ..................... pers. (1)
ƩF = m.a
w – k (Δ + x) = mx
w – kΔ – kx = mx
11
w – w – kx = mx
mx + kx = 0 ................ pers. (2)
dimana :
x = A sin ωt + B cos ωt
x = Aω cos ωt – B w sin ωt
x = -Aω² sin ωt – B ω² cos ωt
Maka :
mx + kx = 0
m (-Aω² sin ωt – B ω² cos ωt) + kx = 0
m (-ω²) (A sin ωt + B cos ωt) + kx = 0
x
-mω² x + kx = 0
(-mω² + k ) x = 0
Getaran terjadi, jika x≠0.Oleh karena itu (k-mω²) = 0 dan akibatnya
-mω² + k = 0
k = mω²
ω² = km
ω=√ km
⇒ωn¿√ km
rad/det=
Perioda natural osilasi dibentuk dari ωnT = 2π
T=2 πωn
=2 π √ mk
Sedangkan frekuensi naturalnya adalah:
f n=1τ= 1
2 π √ km
12
dari getaran yang terjadi untuk diingat suatu prinsip D’Alembert yaitu
suatu sistem dinamik dapat diseimbangkan secara static dengan
menambahkan gaya khayal yang disebut sebagai gaya inersia yang
besarnya sama dengan massa dikali percepatan dengan arah melawan
arah percepatan
b. Getaran Bebas Dengan Redaman
Sistem yang bergetar mengalami redaman sampai derajat tertentu
karena energi didisipasi oleh gesekan dan tahanan lain. Jika redaman
itu kecil, maka pengaruhnya sangat kecil pada frekuensi natural sistem
dan hitungan frekuensi natural biasanya dilaksanakan atas dasar tidak
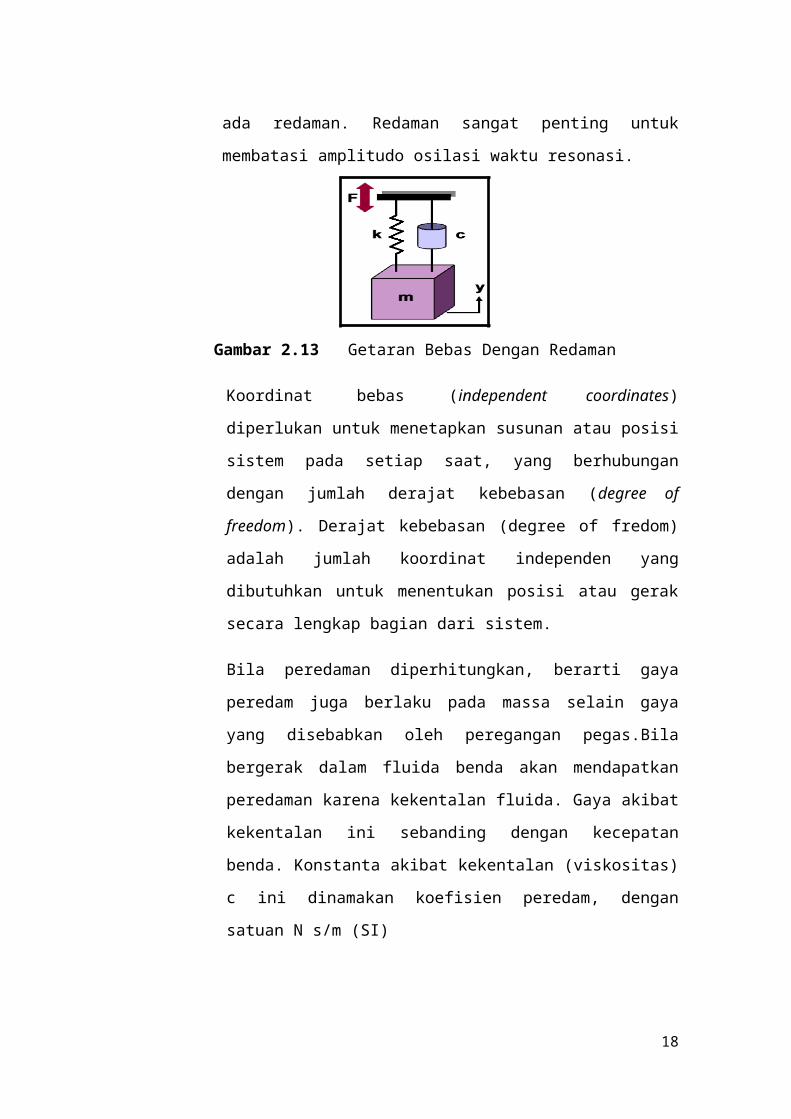
ada redaman. Redaman sangat penting untuk membatasi amplitudo
osilasi waktu resonasi.
Gambar 2.13 Getaran Bebas Dengan Redaman
Koordinat bebas (independent coordinates) diperlukan untuk
menetapkan susunan atau posisi sistem pada setiap saat, yang
berhubungan dengan jumlah derajat kebebasan (degree of freedom).
Derajat kebebasan (degree of fredom) adalah jumlah koordinat
independen yang dibutuhkan untuk menentukan posisi atau gerak
secara lengkap bagian dari sistem.
Bila peredaman diperhitungkan, berarti gaya peredam juga berlaku
pada massa selain gaya yang disebabkan oleh peregangan pegas.Bila
bergerak dalam fluida benda akan mendapatkan peredaman karena
kekentalan fluida. Gaya akibat kekentalan ini sebanding dengan
kecepatan benda. Konstanta akibat kekentalan (viskositas) c ini
dinamakan koefisien peredam, dengan satuan N s/m (SI)
13
Fd=−cv=−c x=−cdxdt
Dengan menjumlahkan semua gaya yang berlaku pada benda kita
mendapatkan persamaan.
m x+c x+k x=0
Solusi persamaan ini tergantung pada besarnya redaman. Bila
redaman cukup kecil, sistem masih akan bergetar, namun pada
akhirnya akan berhenti. Keadaan ini disebut kurang redam, dan
merupakan kasus yang paling mendapatkan perhatian dalam analisis
vibrasi. Bila peredaman diperbesar sehingga mencapai titik saat
sistem tidaklagi berosilasi, kita mencapai titik redaman kritis. Bila
peredaman ditambahkan melewati titik kritis ini sistem disebut
dalam keadaan lewat redam.
Nilai koefisien redaman yang diperlukan untuk mencapai titik
redaman kritis pada model massa-pegas peredam adalah:
cc=2√km
Untuk mengkarakterisasi jumlah peredaman dalam sistem digunakan
nisbah yang dinamakan nisbah redaman. Nisbah ini adalah
perbandingan antara peredaman sebenarnya terhadap jumlah
peredaman yang diperlukan untuk mencapai titik redaman kritis.
Rumus untuk nisbah redaman (ζ ) adalah :
ζ = c2√km
Sebagai contoh struktur logam akan memiliki nisbah redaman lebih
kecil dari 0,05,sedangkan suspensi otomotif akan berada pada selang
0,2-0,3. Solusi sistem kurang redam pada model massa-pegas-
peredam adalah :
x (t )=X eζ ωn t cos ¿
Nilai X, amplitudo awal, dan , ingsutan fase, ditentukan oleh
panjang regangan pegas. Dari solusi tersebut perlu diperhatikan dua
hal: faktor eksponensial dan fungsi cosinus. Faktor eksponensial
menentukan seberapa cepatsistem teredam: semakin besar nisbah
14
redaman, semakin cepat sistem teredam ke titik nol. Fungsi kosinus
melambangkan osilasi sistem, namun frekuensi osilasi berbeda
daripada kasus tidak teredam.
Frekuensi dalam hal ini disebut "frekuensi alamiah teredam", fd, dan
terhubung dengan frekuensi alamiah takredam lewat rumus berikut.
f d=√1−ζ 2 f n
Frekuensi alamiah teredam lebih kecil daripada frekuensi alamiah
takredam, namununtuk banyak kasus praktis nisbah redaman relatif
kecil, dan karenanya perbedaan tersebut dapat diabaikan. Karena itu
deskripsi teredam dan takredam kerap kali tidak disebutkan ketika
menyatakan frekuensi alamiah.
2. Getaran paksa
Getaran paksa adalah getaran yang terjadi karena rangsangan gaya luar,
jika rangsangan tersebut berosilasi maka sistem dipaksa untuk bergetar
pada frekuensi rangsangan, jika frekuensi rangsangan sama dengan salah
satu frekuensi natural sistem, maka akan dapat keadaan resonansi dan
osilasi besar yang berbahaya mungkin terjadi. Kerusakan pada struktur
besar seperti jembatan, gedung ataupun sayap pesawat terbang merupakan
kejadian menakutkan yang disebabkan oleh resonansi. Jadi perhitungan
frekuensi natural merupakan hal yang utama.
2.5 Jenis-Jenis Redaman
Redaman adalah sistem yang bergetar (osilasi) secara bebas akan
mengalami penurunan amplitude getaran atau gerakan untuk melawan sustu
sistem yang bergetar (menurunkan) amplitude getaran suatu sistem). Ada
beberapa jenis redaman sebagai berikut:
1. Redaman Viskos
Merupakan jenis redaman mekanik dimana energy diserap melalui
sejumlah fluida cair. Fluida yang biasa digunakan adalah oli. Fluida
tersebut diletakkan pada sebuah tabung yang berhubungan dengan batang
yang akan diterima.
15
Gambar 2.14 Viscous Dumping
2. Redaman Coulomb
Gaya redaman memiliki besaran konstan tetapi arahnya berlawanan
dengan getaran bodi. Hal ini disebabkan karena gesekan antara permukaan
rubbing baik permukaannya sama-sama kering atau dengan yang salah
satunya memiliki cukup pelumasan. Coulomb redaman adalah mekanisme
redaman umum yang terjadi pada mesin.
Gambar 2.15 Coulomb Dumping
3. Redaman Struktur
Merupakan redaman yang terdapat pada struktur dari sebuah benda.Setiap
benda memiliki redaman struktur tergantung pada kekakuan struktur
tersebut. Apabila sebuah sistem tidak memiliki redaman struktur, maka
sistem akan bergerak secara continue selama-lamanya.
Gambar 2.16 Solid Dumping
16
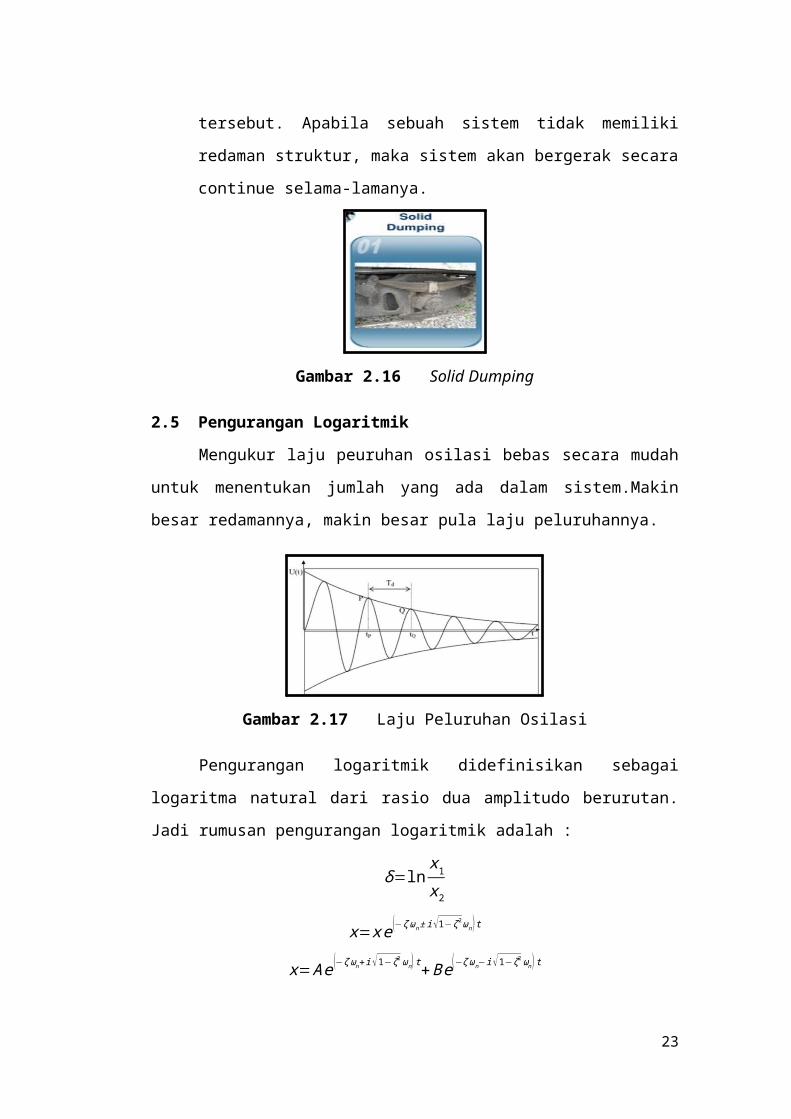
2.5 Pengurangan Logaritmik
Mengukur laju peuruhan osilasi bebas secara mudah untuk menentukan
jumlah yang ada dalam sistem.Makin besar redamannya, makin besar pula laju
peluruhannya.
Gambar 2.17 Laju Peluruhan Osilasi
Pengurangan logaritmik didefinisikan sebagai logaritma natural dari rasio
dua amplitudo berurutan. Jadi rumusan pengurangan logaritmik adalah :
δ=lnx1
x2
x=x e(−ζ ωn ± i√1−ζ 2 ωn ) t
x=A e(−ζ ωn+i√1−ζ 2 ωn) t+B e
(−ζ ωn−i√1−ζ 2 ωn ) t
x=x e−ζ ωn t sin (√1−ζ 2ωnt +θ )
δ=lnx1
x2
δ=lnx e−ζ ωn t1 sin (√1−ζ 2ωnt 1+θ )
x e−ζ ωn ( t1+ td )sin (√1−ζ 2 ωn (t 1+t d )+θ )
δ=lne−ζ ωn t1
e−ζ ωn (t 1+t d)
δ=ln eζ ωn t d
δ=ζ ωn td
δ ≅ 2 πζ
2.6 Pengaplikasian Getaran
Berikut contoh-contoh pengaplikasian getaran diantaranya:
1. Suspensi Kendaran
17
Susunan komponennya per spiral, katup dan oli khusus untuk peredam
Gambar 2.18 Suspensi Kendaraan
2. Jembatan
Perencanaan dan perhitungan getaran pada jembatan sangat penting, oleh
karena itu dalam rancang bangun jembatan perlunya suatu perhitungan
yang mendalam sehingga tidak terjadi suatu musibah seperti pada gambar.
Gambar 2.19 Jembatan
Frekuensi pribadi jembatan sama dengan frekuensi angin sehingga terjadi
resonansi secara terus-menerus dan merubuhkan jembatan.
3. Timbangan/Neraca
Alat yang digunakan melakukan pengukuran massa suatu benda
2.7 Alat Pengukur Getaran
Ada beberapa alat standard yang bisanya digunakan dalam suatu
pengukuran getaran antara lain:
1. Vibration Meter
Vibration meter biasanya bentuknya kecil dan ringan sehingga mudah
dibawa dan dioperasikan dengan battery serta dapat mengambil data
getaran pada suatu mesin dengan cepat. Pada umumnya terdiri dari sebuah
18
probe, kabel dan meter untuk menampilkan harga getaran. Alat ini juga
dilengkapi dengan switch selector untuk memilih parameter getaran yang
akan diukur. Vibration meter ini hanya membaca harga overall (besarnya
level getaran) tanpa memberikan informasi mengenai frekuensi dari
getaran tersebut. Pemakaian alat ini cukup mudah sehingga tidak
diperlukan seorang operator yang harus ahli dalam bidang getaran. Pada
umumnya alat ini digunakan untuk memonitor “trend getaran” dari suatu
mesin. Jika trend getaran suatu mesin menunjukkan kenaikan melebihi
level getaran yang diperbolehkan, maka akan dilakukan analisa lebih lanjut
dengan menggunakan alat yang lebih lengkap.
2. Shock Pulse Meter
Shock pulse meter adalah alat yang khusus untuk memonitoring kondisi
antifriction bearing yang biasanya sulit dideteksi dengan metode analisa
getaran yang konvensional. Prinsip kerja dari shock pulse meter ini adalah
mengukur gelombang kejut akibat terjadi gaya impact pada suatu benda,
intensitas gelombang kejut itulah yang mengindikasikan besarnya
kerusakan dari bearing tersebut. Pada sistem SPM ini biasanya memakai
tranduser piezo-electric yang telah dibuat sedemikian rupa sehingga
mempunyai frekuensi resonansi sekitar 32 KHz. Dengan menggunakan
probe tersebut maka SPM ini dapat mengurangi pengaruh getaran terhadap
pengukuran besarnya impact yang terjadi.
3. Vibration Analyzer
Alat ini mempunyai kemampuan untuk mengukur amplitude dan frekuensi
getaran yang akan dianalisa. Karena biasanya sebuah mesin mempunyai lebih dari
satu frekuensi getaran yang ditimbulkan, frekuensi getaran yang timbul
tersebut akan sesuai dengan kerusakan yang terjadi pada mesin tersebut. Alat ini
biasanya dilengkapi dengan meter untuk membaca amplitudo getaran yang
biasanya juga menyediakan beberapa pilihan skala
4. Oscilokop
Osciloskop adalah salah satu peralatan yang berguna untuk melengkapi
data getaran yang akan dianalisa. Sebuah osciloskop dapat memberikan
sebuah informasi mengenai bentuk gelombang dari getaran suatu mesin.
19
Osiloskop juga dapat memberikan informasi tambahan yaitu: untuk
mengevaluasi data yang diperoleh dari tranduser non-contact (proximitor).
20
BAB III
METODOLOGI
3.1 PeralatanAdapun peralatan yang digunakan pada pratikum getaran bebas adalah
sebagai berikut :
a. Seperangkat alat uji getaran bebas
Digunakan sebagai perangakat utama dari alat uji getaran.
Gambar 3.1 Alat uji getaran bebas
b. Adaptor
Digunakan sebagai penghubung antara kerangka utama alat uji dengan
sumber listrik dan pengaturan arus tegangan.
Gambar 3.2 Adaptor
c. Pegas
Digunakan untuk memberi variasi nilai konstan dar getaran yang diamati
21
Gambar 3.3 Pegas
d. Massa 0,34 kg dan 0,64 kg
Digunakan untuk memberi gaya beban yang akan menyebabkan getaran
nantinya.
e. Pulpen
Digunakan sebagai alat pencatat grafik getaran
Gambar 3.4 Pulpen
f. Stopwatch
Digunakan untuk mengukur waktu getaran hingga getaran tersebut
setimbang (nol)
Gambar 3.4 Stopwatch
g. Rol kertas
Digunakan sebagai media mencatat grafik, agar hasilnya dapat dihitung
h. Oli atau redaman
22
Digunakan sebagai redaman fluida viskos pada praktikum getaran bebas
3.2 Prosedur Praktikum
Adapun Prosedur pelaksanaan pratikum governor yang telah dilaksanakan
adalah sebagai berikut :
a) Alat pengujian getaran bebas disiapkan dengan menyusun alat seperti
gambar,tanpa redaman.
Gambar 3. 6 Alat Uji Getaran Bebas
b) Pasang pegas.
c) Gunakan beban sebesar 0,34 kg.
d) Kertas pencatat dipasang pada alat pengujian getaran bebas.
e) Pulpen pencatat dikontakkan pada kertas pencatat.
f) Beri sedikit simpangan agar dapat menentukan titik awal dari grafik
getaran.
g) Jalankan drum pembawa kertas dengan menghidupkan adaptor, dengan
menekan tombol power dengan memutar tegangan sebesar 4,5V
Gambar 3. 7 Adaptor
23
untuk panjang waktu tertentu catat waktu yang diperlukan, sehingga
diperoleh kecepatan gerak lurus dari kertas pencatat grafik tersebut
h) Beri simpangan pada massa dengan cara menarik kebawah massa tersebut.
i) Hentikan getaran jika grafik pada rol kertas membentuk garis lurus.
j) Setelah diperoleh hasil uji, hentikan drum pembawa kertas.
k) Tambahkan pegas dari satu ke dua lalu ke tiga dengan massa yang sama.
l) Catat hasil pengujian.
m) Ulangi langkah 1 sampai dengan 9 diatas
n) Pasang peredam pada tempat yang telah di tentukan dengan cairan oli
o) Catat hasil pengujian
p) Setelah itu ganti beban yang digunakan menjadi 0,64 kg
q) Lakukan langkah 2 sampai dengan langkah 13 yang ada diatas
r) Analisis dan simpulkan hasil dari praktikum.
24
BAB IV
PENGOLAHAN DATA
4.1 Tabel Data
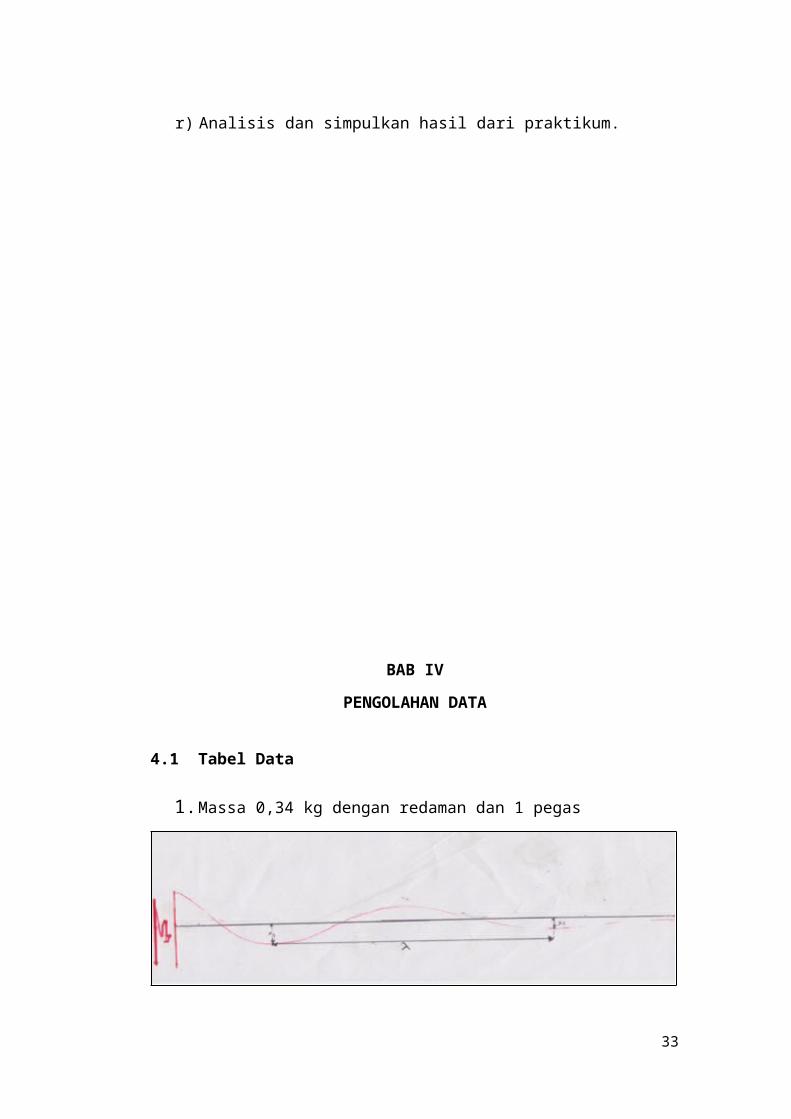
1. Massa 0,34 kg dengan redaman dan 1 pegas
Gambar 4.1 Grafik Percobaan 1
2. Massa 0,34 kg dengan redaman dan 2 pegas
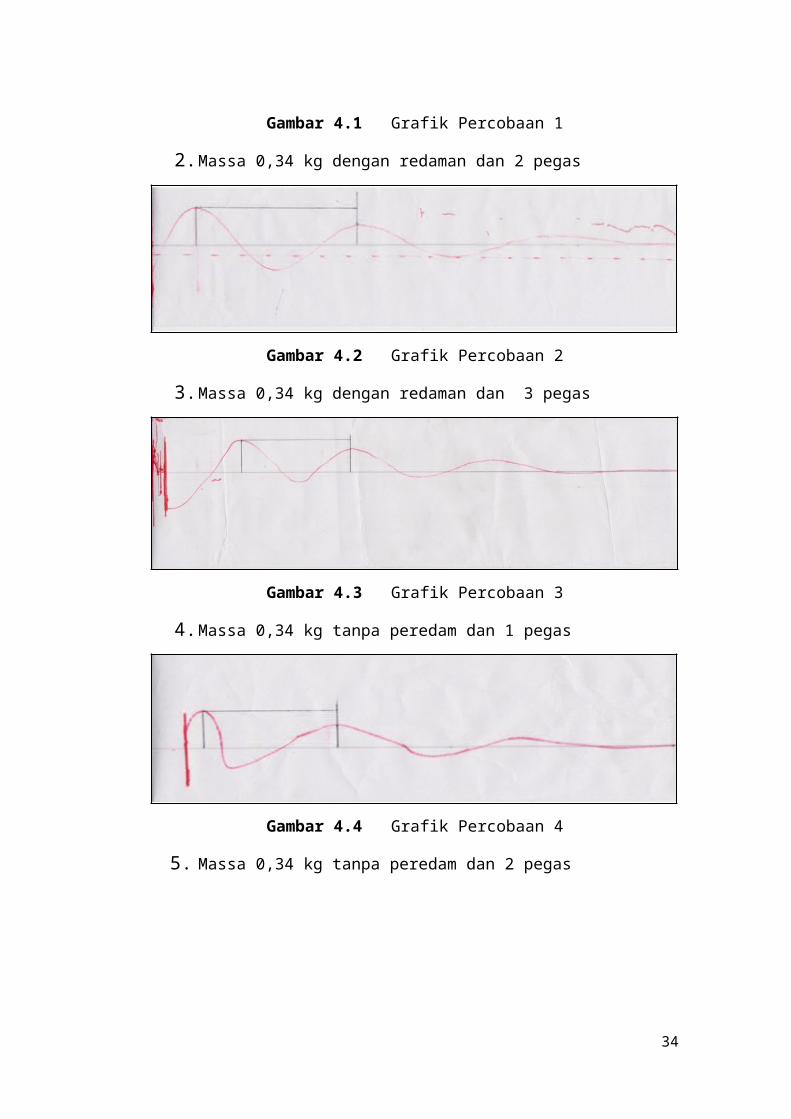
Gambar 4.2 Grafik Percobaan 2
3. Massa 0,34 kg dengan redaman dan 3 pegas
Gambar 4.3 Grafik Percobaan 3
4. Massa 0,34 kg tanpa peredam dan 1 pegas
25
Gambar 4.4 Grafik Percobaan 4
5. Massa 0,34 kg tanpa peredam dan 2 pegas
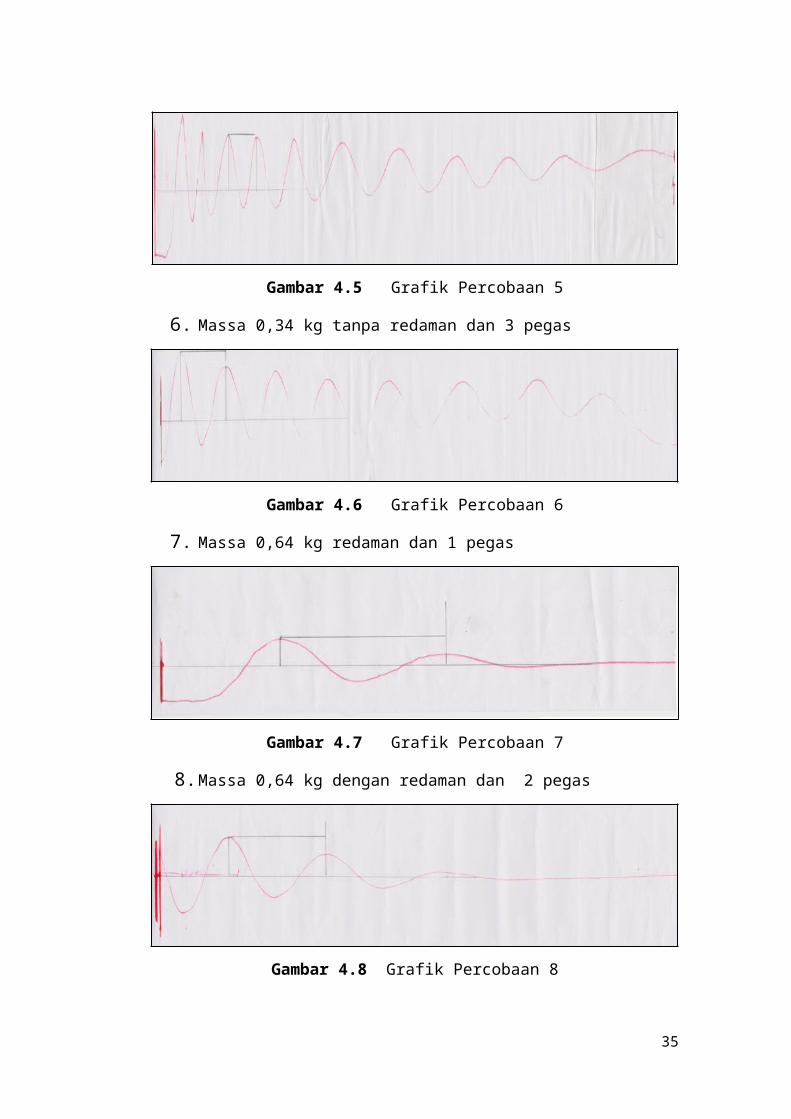
Gambar 4.5 Grafik Percobaan 5
6. Massa 0,34 kg tanpa redaman dan 3 pegas
Gambar 4.6 Grafik Percobaan 6
7. Massa 0,64 kg redaman dan 1 pegas
Gambar 4.7 Grafik Percobaan 7
8. Massa 0,64 kg dengan redaman dan 2 pegas
26
Gambar 4.8 Grafik Percobaan 8
9. Massa 0,64 kg dengan redaman dan 3 pegas
Gambar 4.9 Grafik Percobaan 9
10. Massa 0,64 kg tanpa redaman dan1 pegas
Gambar 4.10 Grafik Percobaan 10
11. Massa 0,64 kg tanpa redaman dan 2 pegas
Gambar 4.11 Grafik Percobaan 11
12. Massa 0,64 kg tanpa redaman dan 3 pegas
27
Gambar 4.12 Grafik Percobaan 12
4.2 Contoh Perhitungan
1. Menggunakan 1 pegas dengan redaman
Diketahui: k = 1769,99 N/m
t = 1,5 s𝛌 = 0,127 m
m = 0,34 kg
X1= 0,01 m
X2= 0,005 m
Pencarian:
Frekuensi pribadi (Pengujian)
ωn=√ km
¿√ 1769,99 N /m0,34 kg
¿72,15 rad / s
ωn=2πf
f =ωn
2π
f =72,15 rad /s2 x3,14
f =11,49 Hz
Pengurangan logaritma
δ = ln x1x2
28
δ = ln 0,01 m
0,005 m=0,693
Rasio redaman
ζ = δ
2 π
ζ = 0,693
2 x 3,14 = 0,110
Koefisien redaman
c = ζ x ccr = 2 ζ √km
c =2 x 0,110 x √1769,99 N /m x 0,34kg
= 5,41
Frekuensi Pribadi teredam (Pengujian)
ωD = √(1−(ζ 2 xωn2 π ))
ωD = √(1−(0,1102 x72,15
2 π )) =0,927Hz
2. Menggunakan 1 pegas dengan tanpa redaman
Diketahui: k = 1769,99 N/m
t = 2 s n= 3,5𝛌 = 0,11 m
m = 0,64 kg
Pencarian:
Frekuensi pribadi (Pengujian)
ωn=√ km
¿√ 1769,99 N /m0,64 kg
¿52,59 rad /s
ωn=2πf
f =ωn
2 π
29
f =52,59 rad /s2 x3,14
f =8,37 Hz
frekuensi
f =nt=3,5
2 s=1,75 Hz
kecepatan
v=Lt=0,385 m
2 s=0,192
ms
Panjang gelombang
λ= vf=0,192 m/ s
1,75=0,11 m
Frekuensi pribadi (Teori)
ωn¿√ km
=√ 1769,99 N /m0,64 kg
= 52,58 rad/s
ωn= 2πf
f =ωn2 π
= 52,58 rad /s
2 x 3,14 =8,36 Hz
Frekuensi pribadi (Pengujian)
f =vλ=0,192 m /s
0,11 m=1,75 Hz .
4.3 Tabel Perhitungan
a. Tabel perhitungan getaran bebas tanpa redaman
Tabel 4.1 Tabel tanpa redaman dengan 0,34 kg
Jumlah
Pegas
Massa (kg)
Kekakuan (N/m)
Frekuensi Pribadi (teori)
Panjang Gelombang
(m)
Kecepatan (m/s)
Frekuensi Pribadi
(Pengujian)
10.34
1769.99 11.483 0.062 0.074 1.2
2 3539.98 16.239 0.089 0.360 4.038
3 5309.97 19.890 0.099 0.282 2.833
Tabel diatas adalah merupakan getaran tanpa redaman dengan massa 0,34
kg, dan jumlah pegas yang mempengaruhi dalam praktikum getaran. Sehingga
30
didapatkan nilai berupa, frekuensi pribadi teori, panjang gelombang, kecepatan,
dan frekuensi pribari sesuai pengujian.
Tabel 4.2 Tabel tanpa redaman dengan 0,64 kg
Jumlah
Pegas
Massa (kg)
Kekakuan (N/m)
Frekuensi Pribadi (teori)
Panjang Gelombang
(m)
Kecepatan (m/s)
Frekuensi Pribadi
(Pengujian)
10.64
1769.99 8.370 0.110 0.193 1.75
2 3539.98 11.837 0.063 0.098 1.563
3 5309.97 14.497 0.057 0.168 2.955
Tabel diatas adalah merupakan getaran tanpa redaman dengan massa 0,64
kg, dan jumlah pegas yang mempengaruhi dalam praktikum getaran. Sehingga
didapatkan nilai berupa, frekuensi pribadi teori, panjang gelombang, kecepatan,
dan frekuensi pribari sesuai pengujian.
b. Tabel perhitungan getaran bebas dengan peredaman
Tabel 4.3 Tabel dengan redaman dengan 0,34 kg
Jumla
h
Pegas
Massa
(kg)
Kekakuan
(N/m)
X1
(m)
X2
(m)Zeta
Redaman
(c)
Frek.Pengujian
(Hz)
1
0.34
1769.99 0.01
0.00
5 0.110 5.413 0.927
2 3539.98 0.019 0.01 0.102 7.088 0.911
3 5309.97 0.016
0.01
2 0.046 3.891 0.979
Tabel diatas adalah merupakan getaran mengunakan redaman dengan
massa 0,34 kg, dan jumlah pegas yang mempengaruhi dalam praktikum getaran.
Sehingga didapatkan nilai berupa, frekuensi pribadi teori, panjang gelombang,
kecepatan, dan frekuensi pribari sesuai pengujian.
Tabel 4.4 Tabel dengan redaman dengan 0,64 kg
Jumla
h
Massa Kekakuan X1 X2 Zeta Redaman Frek.Pengujian
31
Pegas (kg) (N/m) (m) (m) (c) (Hz)
1
0.64
1769.99 0.013
0.00
5 0.152 10.237 0.898
2 3539.98 0.019
0.
011 0.087 8.281 0.954
3 5309.97 0.025 0.02 0.036 4.141 0.991
Tabel diatas adalah merupakan getaran mengunakan redaman dengan
massa 0,34 kg, dan jumlah pegas yang mempengaruhi dalam praktikum getaran.
Sehingga didapatkan nilai berupa, frekuensi pribadi teori, panjang gelombang,
kecepatan, dan frekuensi pribari sesuai pengujian.
4.4 Grafik Perhitungan
0.5 1 1.5 2 2.5 3 3.502468
10121416182022
Kurva Hasil Pengujian Peredam dan Tanpa Peredam (massa 0.34 kg)
Frek.Pribadi (Teori)Frek.Pribadi (Pengu-jian)Frek.Pribadi (Redaman)
Jumlah Pegas
Fre
ku
ensi
(H
z)
Gambar 4.13 Grafik Hasil pengujian dengan 0,34 kg
32
0.5 1 1.5 2 2.5 3 3.50123456789
10111213141516
Kurva Hasil Pengujian Peredam dan Tanpa Peredam (massa 0,64 kg)
Frek.Pribadi (Teori)
Frek.Pribadi (Pengujian)
Frek.Pribadi(Redaman)
Jumlah Pegas
Fre
ku
ensi
(H
z)
Gambar 4.14 Grafik Hasil pengujian dengan 0,64 kg
4.5 Analisis dan Pembahasan
Adapun analisa yang didapatkan dari hasil praktikum dalam bentuk data
dan grafik adalah sebagai berikut:
0.5 1 1.5 2 2.5 3 3.502468
10121416182022
Grafik Hasil Pengujian Peredam dan Tanpa Peredam (massa 0.34 kg)
Frek.Pribadi (Teori)
Frek.Pribadi (Pengujian)
Frek.Pribadi (Redaman)
Jumlah Pegas
Fre
ku
ensi
(H
z)
Gambar 4.15 Grafik Hasil pengujian dengan 0,34 kg
Pada percobaan getaran bebas tanpa peredam, dari grafik hasil pengujian
peredam dan tanpa peredam dengan massa 0,34 kg dan 0,64 kg dapat dilihat
33
bahwa adanya perbedaan yang besar antara nilai frekuensi secara teoritis dengan
nilai frekuensi hasil pengujian. Perbedaan yang besar ini dapat dilihat pada
masing-masing nilai frekuensi pengujian dan frekuensi secara teoritis yang
mempunyai range yang jauh dengan perbandingan rata 6:1. Hal ini menunjukkan
hasil pengujian yang tidak akurat dan disebakan beberapa faktor.
Kondisi alat uji yang tidak bekerja dengan baik sehingga nilai konstanta
pegas tidak sesuai lagi dengan nilai yang sesungguhnya ini dapat dilihat ketika
diberi simpangan pegas kembali keposisi sebelumnya dengan tidak sempurna,
ketika sebelum pegas diberi simpangan dan masih dibebani massa pegas jarak
kawat pegas rapat, lalu pada saat pegas diberi simpangan dan kembali ke posisi
semula dimana posisi kesetimbangannya jarak antar kawat tersebut terjadi
perbedaan yaitu semakin besar, hal ini dapat dikatakan pegas sudah tidak presisi
sehingga nilai konstanta pegas tidak sesuai lagi dengan nilai sebenarnya.
Dari praktikan, kesalahan dalam pengukuran dan pengambilan data yang
tidak akurat sehingga pada saat perhitungan yang terjadi data tidak sesungguhnya.
Selain itu penggulungan kertas pada drum oleh praktikan yang tidak rapi,
penggulung kertas grafik tidak berputar dengan konstan dan tidak lurus terhadap
drum pembawa kertas, hasil dari pena pencatat kekertas pencatat tidak sejajar
pada simpangan yang diberikan sehingga grafik gelombang getaran bebas yang
didapat tidak beraturan. Antara penghitungan waktu dan drum pembawa kertas
tidak selaras sesuai dengan penghentian waktu stopwatch, maka panjang
gelombang yang tercatat tidak sesuai dengan penghentian waktu dan
mengakibatkan penghitungan data yang tidak akurat terhadap kecepatan dan
panjang gelombang.
Percobaan dengan peredam dapat dilihat pada perhitungan Zeta (ζ ¿
berpengaruh terhadap jumlah pegas (konstanta) dan massa benda. Zeta (ζ ¿
sebanding dengan jumlah pegas maupun massa bendanya.
Percobaan dengan peredam terbukti dapat menurunkan getaran suatu
benda sehingga frekuensi pribadinya pun turun. Pada grafik jika dibandingkan
dengan tanpa peredam nilai frekuensi peredam lebih rendah.
34
BAB IV
DISKUSI DAN KESIMPULAN
Dari praktikum yang telah dilaksanakan dapat didiskusikan bahwa
getaran terjadi ketika benda diganggu berupa gaya dengan memberikan
simpangan, massa dan elastisitas suatu system benda. Getaran bebas ini
merupakan getaran yang terjadi pada system itu sendiri. Getaran bebas ini dengan
menggunakan peredam viskos. Peredam viskos itu sendiri menyerap energy
getaran ke fluida.
Dari hasil praktikum yang telah dilakukan, maka dapat diambil beberapa
simpulan, yaitu :
.
1. Harga frekuensi pribadi suatu sistem berbanding terbalik dengan nilai
massa yang digunakan yaitu wn=√ km
Semakin berat massa pecobaan maka
nilai frekuensi pribadi (wn) akan semakin kecil.
2. Harga frekuensi pribadi suatu system berbanding lurus dengan kekakuan
pegasnya yaitu wn=√ km
Semakin besar nilai kekakuan pegas (k) maka
semakin besar pula nilai frekuensi pribadi (wn).
3. Harga zeta (ζ ) berbanding lurus dengan kekakuan pegas maupun dengan
massa yang digunakan.
4. Penggunaan peredam pada suatu system yang diberikan simpangan dapat
mengurangi getaran atau amplitudo yang tinggi karena suatu amplitude
berkaitan erat dengan waktu.
5. Hasil dari pengujian terjadi perbedaan dengan hasil teoritis karena Human
Error.
35
DAFTAR PUSTAKA
http://taufiqurrokhman.com/2011/07/12/bahan-kuliah-getaran-mekanik/ (diakses :
10 Okteober 2015)
http://www.sperdirect.com/electro-luminescent-stopwatch-186-prd1.htm(diakses :
10 Okteober 2015)
http://www.yekatria.com/produk-95-garputala.html (diakses : 10 Okteober 2015)
https://enhilmy.wordpress.com/2011/05/29/berkenalan-dengan-pegas/ (diakses :
10 Okteober 2015)
https://yefrichan.wordpress.com/2010/10/13/getaran-bebas/ (diakses : 10
Okteober 2015)
Team Asisten LKM.2004.Panduan Praktikum Fenomena Dasar Mesin Bid.Konstruksi Mesin Dan Perancangan.Jurusan Teknik Mesin FT-UNRI:Pekanbaru
William, T.Thomson.1998.Theori Of Vibration With Application Practice. Hall
Int:London
36
LAMPIRAN
37
1. Turunkan solusi persamaan diferensial gerak sistem getaran bebas yang
dinyatakan di persamaan (3.7) untuk kondisi awal berupa simpangan
Jawab :
Diketahui : I 0=1
12M L2
sin θ ≈ θ sin θ ≈ θ
x=a sin θ x=b sin θx=a θ C x=Ca θ x=b θ C x=Kb θx=a θ kx=b θ
ΣM=0
[MPa. a+ 112
M L2+
ML2
∗L
2 ] ¨θ+¿Caθ . a+ Kbθ . b=0¿
[MPa2+ M L2
12+ M L2
4 ] ¨θ+¿C a2 θ+K b2 θ=0¿
[MPa2+ M L2+3 M L2
12 ] ¨θ+¿C a2 θ+K b2 θ=0¿
[MPa2+ M L2
3 ] θ+C a2 θ+K b2 θ=0
2. Turunkan asal-usul penentuan konstanta pegas di persamaan (3.6) dan
(3.8).
Jawab :
Rumus ωn=√ km
f =1T
ωn=2 πf →2 πT
2 πT
=√ km
→km
=( 2 πT )
2
→ k4 π2
T n
m
3. Turunkan solusi pesamaan diferensial gerak sistem getaran bebas teredam
yang dinyatakan di persamaan (3.9) unutk kondisi awal berupa simpangan.
38
Dalam hal ini faktor redaman, ζ <1 (sistem teredam kurang atau
underdamped )
Jawab :
Dari persamaan gerak newton ΣF=m. a=md2 xd t 2 → Percepatan
Komponen gaya diatas diuraikan menjadi gaya pemulih dan gaya
hambatan, gaya pemulih berbanding lurus dengan simpangannya.
F p=−kx
Gaya hambat adalah meredam gaya pemulih
Fh=−bv=−bdxdt
Disubtitusikan.
Md2 xdt 2 + bdx
dt+kx=0
M ek θ+C ek θ+kek x=0
4. Dari pengolahan data, dapat dipastikan bahwa hasil uji akan mempunyai
perbedaan dengan solusi teoritik. Menurut anda, mana yang lebih bisa
dipercaya? Beri argumentasi secukupnya. Selain itu, coba anda uraikan
berbagia sumber yang berkontribusi terhadap perbedaan hasil tersebut.
Jawab :
Yang bisa dipercaya adalah solusi teoritik karena solusi teoritik telah
mempunyai rumus standar yang telah disepakati dibandingkan solusi hasil
uji. Kebanyakan praktikan mengalami kesalaha dalam pengambilan data (
Human error )
39