Modul 11 Transformasi
14
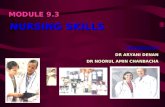
MODUL 11 TRANSFORMASI Z Transformasi Z untuk sinyal dan sistem waknu diskrit adalah ekivalen dengan transformasi Laplace pada kawasan waktu kontinyu , dengan keuntungan mempermudah perhitungan. Karena sampai dengan modul ini kita belum pernah membahas sinyal dan sistem waktu diskrit, maka terlebih dahulu dibawah ini kita akan membahas hal tersebut. Sinyal dan Sistem Waktu Diskrit Sinyal Waktu Diskrit Sinyal waktu dapat dibagi menjadi 2 yaitu sinyal waktu kontinyu dan sinyal waktu diskrit. Sinyal waktu kontinyu (analog) didefinisikan untuk setiap nilai waktu dan diambil pada nilai-nilai dalam selang kontinyu (a,b) dengan a dapat menjadi dan b dapat menjadi . Secara metematis sinyal- sinyal ini dapt didesripsikan dengan fungsi dari suatu variabel kontinyu . Sinyal waktu diskrit didefinisikan hanya pada nilai-nilai waktu tertentu/khusus. Dibawah ini gambar 1 dalai contoh sinyal kontinyu x 1 = A cos (t + ) dan gambar 2 dalai contoh sinyal diskrit x(n) = 0,8 n Gambar 1 Sinyal kontinyu x ( t) = A cos (t + ) x(n) PUSAT PENGEMBANGAN BAHAN AJAR-UMB Ir. Said Attamimi MT. SINYAL DAN SISTEM 1
-
Upload
radiansitumeang -
Category
Documents
-
view
230 -
download
1
description
Modul Transformasi
Transcript of Modul 11 Transformasi
TRANSFORMASI
MODUL 11TRANSFORMASI Z
Transformasi Z untuk sinyal dan sistem waknu diskrit adalah ekivalen dengan transformasi Laplace pada kawasan waktu kontinyu , dengan keuntungan mempermudah perhitungan. Karena sampai dengan modul ini kita belum pernah membahas sinyal dan sistem waktu diskrit, maka terlebih dahulu dibawah ini kita akan membahas hal tersebut.
Sinyal dan Sistem Waktu Diskrit
Sinyal Waktu Diskrit
Sinyal waktu dapat dibagi menjadi 2 yaitu sinyal waktu kontinyu dan sinyal waktu diskrit. Sinyal waktu kontinyu (analog) didefinisikan untuk setiap nilai waktu dan diambil pada nilai-nilai dalam selang kontinyu (a,b) dengan a dapat menjadi ( dan b dapat menjadi (. Secara metematis sinyal-sinyal ini dapt didesripsikan dengan fungsi dari suatu variabel kontinyu . Sinyal waktu diskrit didefinisikan hanya pada nilai-nilai waktu tertentu/khusus. Dibawah ini gambar 1 dalai contoh sinyal kontinyu x1 = A cos ((t + () dan gambar 2 dalai contoh sinyal diskrit x(n) = 0,8 n
Gambar 1Sinyal kontinyu x ( t) = A cos ((t + ()
x(n)
0 1 2 3 4
x(n)
Gambar 2Sinyal waktu diskrit x (n) = 0,8 n
Maka dapat dikatakan sinyal waktu diskrit x(n) merupakan fungsi dari variabel bebas, dengan variabel bebas merupakan bilangan integer, maka penting untuk diperhatikan bahwa sinyal waktu diskrit tidak didefinisikan pada antara dua bilangan integer, atau dengan kata lain x(n) tidak didefinisikan untuk nilai n bukan integer
Tampilan Sinyal Waktu Diskrit
Ada beberapa cara menampilkan sinyal waktu diskrit, yaitu :
Tampilan dalam bentuk fungsional, seperti :
1untuk n = 1,3
x(n) =4untuk n = 2
0 dimanapun (selain n diatas)
Tampilan dalam bentuk tabel seperti :
n..-2-101234
x(n)..0001410
Tampilan dalam bentuk barisan
Suatu sinyal atau barisan durasi tak berhingga dengan waktu awal (n=0) ditunjukkan denga simbol ( disajikan sebagai :
x(n) = { 0,0,1,4,1,0,0, }
(
Suatu barisan x(n), yang bernilai 0 untuk n < 0 dapat disajikan sebagai :
x(n) = { 0,1,4,1,0,0, }
(
Suatu barisan durasi berhingga dapat ditampilkan sebagai :
x(n) = { 3,-1,-2,5,0,4,-1}
Sedangkan suatu barisandurasi berhingga yang memenuhi kondisi x(n)=0 untuk n < 0 dapat ditampilkan sebagai :
x(n) = { 0,1,4,1}
(Sstem Waktu Diskrit
Sistem waktu diskrit dalai divais atau algoritma yang beroperasi pada sinyal waktu diskrit yang dinamakan masukan (input), menurut beberapa aturan yang didefinisikan dengan baik, untuk menghasilkan sinyal waktu diskrit lain dinamakan keluaran atau respons sistem. Umumnya, kita mamandang sebuah sebuah sistem sebagai suatu operasi atau sekelompok operasi yang dilakukan pada sinyal keluaran y(n). Kita katakan bahwa sinyal masukan x(n) untuk menghasilkan sinyal masukan x(n) yang ditransformasikan dengan sistem tersebut menjadi sinyal y(n), dan menyatakan hubungan umum antara x(n) dan y(n) sebagai :
y(n) = ( [x(n)]
dengan simbol ( menunjukkan transformasi (juga dinamakan operator), atau pemrosesan dilakukan dengan sistem pada x(n) untuk menghasilkan y(n). Dibawah ini digambarkan diagram blok diagram tampilan sistem waktu diskrit.
x(n)
y(n)
Klasifikasi Sistem Waktu Diskrit
Sistem dapat diklasifikasikan pada beberapa macam , yaitu :
Sistem Linier dan Nonlinier
Sistem linier adalah sistem yang memenuhi hukum superposisi. Prinsip superposisi adalah respons sistem (keluaran) terhadap jumlah bobot sinyal akan sama dengan jumlah bobot yang sesuai dari respon (keluaran) sistem terhadap masing-masing sinyal masukan individual. Karena itu linieritas dapat didefinisikan sebagai berikut.
Teorema : Sistem adalah linier jika dan hanya jika
([a1x1(n) + a2x2(n)] = a1 ([x1(n)] + a2 ([x2(n)]
(9.3)
untuk setiap deret masukan x1(n) dan x2(n) yang berubah-ubah dan setiap konstanta a1 dan a2 yang berubah-ubah.
Gambar 1.2 dibawah ini memberikan ilustrasi dari superposisi
x1(n)
a1
y(n)
x2(n)
a2
x1(n)
a1
y(n)
x2(n)
a2
Gambar 1.2 Tampilan Grafis Prinsip Superposisi, ( linier jika dan hanya jika y(n) = y(n)
Sistem yang tidak memenuhi prinsip superposisi seperti diberikan pada definisi diatas, dinamakan sistem nol-linier.
Contoh : Jika sistem sistem didiskripsikan dengan persamaan masukan- keluaran sebagai berikut, tentukan apakah sistem linier atau non-linier.
(a) y(n) = t x(n)
(b) y(n) = x2(n)
(c) y(n) = Ax(n) + B
Jawab :
(a) Untuk dua deret masukan x1(n) dan x2(n) keluaran yang sesuai adalah :
y1(n) = t x1(n)
(9.4)
y2(n) = t x2(n)
Kombinasi linier dari kedua deret masukan menghasilkan keluaran :
y3(n) = ([a1x1(n) + a2x2(n)] = t[a1x1(n) + a2x2(n)]
= a1 tx1(n) + a2 tx2(n)
(9.5)
Sebaliknya, kombinasi linier dari kedua keluaran dalam (9.4) menghasilkan keluaran :
ay1(n) + ay2(n) = a1 tx1(n) + a2 tx2(n)
(9.6)
Karena ruas kanan dari persamaan (9.5) dan (9.6) identik , maka sistem tersebut linier(b) seperti pada bagian (a) kita dapatkan respons sistem terhadap dua sinyal masukan secara terpisah x1(n) dan x2(n), hasilnya adalah :
y1(n) = x12(n)
(9.7)
y2(n) = x22(n)
keluaran sistem terhadap kombinasi linier x1(n) dan x2(n) adalah :
y3(n) = ([a1x1(n) + a2x2(n)] = [a1x1(n) + a2x2(n)]2
= a12x12(n) + 2a1a2x1(n)x2(n) + a22x22(n)
(9.8)
Sebaliknya, kombinasi linier dari kedua keluaran dalam (9.7) menghasilkan keluaran :
ay1(n) + ay2(n) = a1 x12(n) + a2 x22(n)
(9.9)
Karena ruas kanan dari persamaan (9.8) dan (9.9) tidak sama , maka sistem tersebut non-linierSistem Invarian waktu dan varian waktu
Sistem dinamakan invarian waktu, jika karakteristik masukan-keluaran tidak berubah menurut waktu. Secara terperinci, anggaplah keluaran y(n) adalah transformasi dari x(n), sehingga dapat kita tulis :
y(n) = ([x(n)]
(9.10)
Sekarang anggap sinyal masukan yang sama ditunda k sekon untuk menghasilkan x(n-k), dan juga dipakai sistem yang sama. Jika karakteristik sistem tidak berubah dengan waktu, maka keluaran sistem akan menjadi y(t-k), yakni keluaran akan sama seperti respons terhadap x(n), kecuali bahwa ia akan ditunda k sekon, yang sama dengan penundaan masukannya. Karen itu dapat kita definisikan sistem invarian waktu sebagai berikut.
Teorema : Suatu sistem adalah invarian waktu jika dan hanya jika
(x(n)
y(n)
akan mamberikan
(x(n-k)
y(t-k)
untuk setiap sinyal masukan x(n) dan setiap pergeseran k sekon.
Untuk keperluan uji coba respons sistem dari x(n-k) atau ([x(n)]dinotasikan dengan y(n,k) , sehingga dapat ditulis :
y(t,k ) = ([x(n)]
Sekarang dapat kita katakan suatu sistem invarian waktu, jika dan hanya jika :
y(t,k ) = y(t-k)
Contoh soal :
Selidikilah apakah sistem-sistem dibawah ini invarian waktu atau varian waktu ?
(a) y(n) = ([x(n)] = x(n) x(n-1)
(b) y(n) = ([x(n)] = t x(n)
(c) y(n) = ([x(n)] = x(-t)
(d) y(n) = ([x(n)] = x(n) cos (ot
Jawab :
(a)y(t,k) = x(n-k) x(n-k-1)
(9.11)
y(t-k) = x(n-k) x(n-k-1)
(9.12)
Ruas kanan persamaan (9.11) dan (9.12) identik, maka sistem tersebut invarian waktu
(b) y(t,k) = t x(n-k)
(9.13)
y(t,k) = (t-k) x(n-k)
(9.14)
Karena ruas kanan persamaan (9.13) dan (9.14) berbeda, maka sistem tersebut varian waktu
(c) y(t,k) = x(-t-k)
(9.15)
y(t-k) = x (-(t-k)) = x(-t+k)
(9.16)
Karena ruas kanan persamaan (9.15) dan (9.16) berbeda, maka sistem tersebut varian waktu
(d) y(t,k) = x(n-k) cos (ot
(9.17)
y(t-k) = x(n-k) cos (o(t-k)
Karena ruas kanan persamaan (9.15) dan (9.16) berbeda, maka sistem tersebut varian waktu
Sistem yang dibentuk oleh rangkaian listrik akan selalu merupakan sistem invarian waktu, dengan syarat resistor, induktor dan kapasitor bukan merupakan besaran yang berubah terhadap waktu.
Sistem linier dan dan sekaligus invarian waktu disebut sistem LTI (linier, time invarian)
Sistem Statis dan Dinamis
Suatu sistem dinamakan statis atau tanpa memori jika dan hanya jika keluaran untuk setiap waktu t hanya bergantung pada masukan untuk waktu yang sama, bukan pada masukan sebelum atau sesudahnya, sebaliknya suatu sistem dinamakan dinamis atau akan mempunyai memori, jika dan hanya jika keluaran sistem untuk setiap waktu t secara mutlak bergantung pada masukan sebelumnya.
Contoh :
(1)Sistem statis (tanpa memori) :
y(n) = a x(n)
y(n) = a x(n) + b x2(n)
(2)Sistem dinamis (dengan memori)
y(n) = x(n) + 3 x(n 1)
y(n) = x(n 2) + 5 x(n-4)
y(n) =( x(n-k)
y(n) =( x(n-k)
1.2.4 Sistem Sebab Akibat (Causal) dan Bukan Ssbab Akibat (Non-Causal)
Teorema : Suatu sistem dikatakankausal jika dan hanya jika keluaran sistem untuk setiap waktu hanya bergantung pada masukan sekarang dan sebelumnya [yaitu x(n), x(n-1), x(n-2), ] dan tidak bergantung pada masukan yang akan datang [dengan kata lain, x(n+1), x(n+2), ]. Dalam bahasa matematis, keluaran sistem kausal memenuhi persamaan dalam bentuk :
y(n) = f[x(n), x(n-1), x(n 2), x(n 3), ]
(9.18)
Jika sistem tidak memenuhi definisi diatas, disebut non- kausal . Sistem seperti itu mempunyai keluaran tidak hanya bergantung pada masukan sekarang dan sebelumnya saja, tapi juga bergantung pada masukan yang akan datang juga. Jelas sistem non-kausal tidak dapat direalisasikan sistem waktu-real, tapi hanya dapat direalisasikan untuk untuk sistem off-line (waktu non-real).
Contoh soal :
Tentukan apakah sistem dideskripsikan dibawah ini merupakan sistem kausal atau non-kausal :
(a) y(n) = x(n) x(n-1)
(b) y(n) = x2(n)
c) y(n) = Ax(n) + B
(d) y(n) = x(n 2) + 5 x(n-4)
(e) y(n) = x(n2)
(f) y(n) = x(2t)
(g) y(n) = x(-n)
Jawab:
Sistem yang dideskripsikanpada bagian (a), (b) dan (c) jelas kausal dan sistem yang dideskripsikanpada bagian (d), (e) ,(f) dan (g) jelas non-kausalSistem Stabil dan Tidak Stabil
Stabilitas merupakan sifat penting yang harus dipertimbangkan dalam setiap aplikasi praktis dari sistem. Sistem yang tidak stabil biasanya memunculkan sifat tak menentu dan sifat perbedaan yang mencolok dan menyebabkan aliran berlebih (overflow) dalam setiap implementasi praktis. Dibawah ini kita akan mendefinisikan secara matematis apa yang kita maksud dengan sistem stabil.
Teorema : Suatu sistem berelaksasi (bertransformasi) yang berubah-ubah dikatakan menjasi stabil masukan terbatas keluaran terbatas (bounded input-bounded output = BIBO) jika dan hanya jika setiap masukan terbatas menghasilkan keluaran terbatas.
Kondisi masukan x(n) dan keluaran y(n) terbatas diterjemahkan secara matematis dengan arti bahwa terdapat beberapa angka terbatas , sebut saja Mx dan My, sehingga
(x(n)( ( Mx <
(y(n)( ( My < (
(9.19)
Contoh :
Perhatikan sistem yang dideskripsikan dengan persamaan masukan keluaran :
y(n) = y2(n) + x(n)
sebagai deret nasukan kita memilih sinyal terbatas
x(n) = C ((n)
dengan C adalah konstanta . Kita juga mangasumsikan y(-1) = 0, maka deret keluarannya adalah :
y(0) = C, y(1) = C2, y(2) = C4, .., y(n) = C2t
Jelasnya, keluarannya tak terbatas, bila 1 < ( C ( < ( . Oleh karena itu, sistem ini tidak stabil BIBO, karena deret masukan terbatas menghasilkan keluaran tak terbatas.
Definisi Transformasi Z
Transformasi Z X(z) dari deretan sinyal diskrit x(n) : X(z) =
Operator dari transformasi Z adalah Z(.), didefinisikan sebagai :
Z(x(n)) =X(z) =
Pernyataan definisi diatas biasa dinamakan transformasi z dua sisi, karena variabel n berlaku untuk negatif dan positif. Definisi lain, dalai transformasi z satu sisi, karena harga n hanya berlaku untuk positif saja. Definisi transformasi z satu sisi dapat dituliskan sebagai berikut :
Pernyataan transformasi Z diatas adalah transformasi Z satu sisi, karena hanya untuk n positif saja, sedangkan pada pasal Definisi Transformasi Z adalah transformasi Z dua sisi karena pernyataan sigma berlaku untuk n negatif dan positif. Untuk selanjutnya kita akan menggunakan definisi transformasi Z satu sisi.
Sistem
Waktu
Diskrit
X(z) = EMBED Equation.3
(
(
+
(
+
PAGE PUSAT PENGEMBANGAN BAHAN AJAR-UMB Ir. Said Attamimi MT. SINYAL DAN SISTEM 2
_1104770344.unknown
_1105026561.unknown